Изобретение относится к горной промышленности, а именно к технике шахтного строительства.
Цель изобретения - новышение надежности работы путем предотвращения опрокидывания грейфера и упрощение конструкции.
На фиг. 1 изображена грейферная породопогрузочная ман;ина для проходки вертикальных шахтных стволов, общий вид, рабочее положение; на фиг. 2 - то же, в сложенном положении при перемещении по стволу; на фиг. 3 - машина, вид в плане, в сложенном положении (в увеличенном масштабе).
Грейферная породопогрузочная машина для проходки вертикальных шахтных стволов включает раму 1, в нижней части которой прикреплена кабина 2 машиниста, поворотную в вертикальной и горизонтальной плоскостях стрелу 3, телескопическую рукоять, наружная секция 4 которой посредством 1нарнира 5 соединена со стрелой 3, грейфер 6, шарнирно подвешенный на внутренней секции 7 телескопической рукояти, и породоприемную бадью 8. Машина имеет привод 9 поворота стрелы в горизонтальной плоскости, привод 10 поворота рукояти, В1 полненный в виде силового цилиндра. Рама к)ег1ится к забойной опалубке съемным приспособлением (не показано).
Привод перемещения рамы по стволу (вместе со всей машиной) и привод поворота стрелы 3 в вертикальной плоскости относительно Н1арнира 11 выполнен в виде лебедки (не показана), установленной на поверхности, подъемный канат 12 которой прикреплен к стреле посредством проушины 13. Нижняя ветвь каната 12 размещена между роликами 14, прикрепленными к верхней части рамы 1. В нижней части ка-- бина 2 имеет проушину 15 для присоединения грейфера б при перемещении машины по стволу. К нижнему концу внутренней секции 7 телескопической рукояти прикреплены выступы 16 с возможностью взаимох ействия с грейфером при напорном его внедрении.
Грейферная породопогрузочная машина для проходки вертикальных шахтных стволов работает следующим образом.
Нри помощи лебедки на подъемном канате 12 машину опускают в забой, где раму 1 закрепляют, например, на забойной опа.чубке (не показана). Натяжение каната 12 ослабляют, вследствие чего стрела 3 поворачивается относительно шарнира 11 на заданный угол. Приводы 9 и 10 подключают к стволовой магистрали энергоносителя (не показана). Машина к работе готова. Грейфер 6 внедряют в породу и загружают посредством выдвижения внутренней секции 7 телескопической рукояти.
Когда ось секции 7 находится под углом к оси грейфера 6, возможно его опрокидывание при напорном внедрении в породу. Однако это не происходит, поскольку выступы 16 упираются в крышку грейфера (не обозначена). Далее грейфер разгружается в бадью 8. За счет поворота стрелы в горизонтальной плоскости и поворота телескопической рукояти относительно щар- нира 11 и раздвижения секций рукояти грейфер может нагружаться в любой точ5 ке забоя. При понижении уровня забоя стрелу 3 посредством каната 12 опускают на расчетную позицию и фиксируют этим же канатом путем стопорения барабана лебедки.
Для складывания машины перед ее
0 перемещением по стволу телескопическую рукоять устанавливают в вертикальное положение, отключают приводы от магистрали энергоносителя, натягивают канат 12 так, чтобы стрела заняла вертикальное по5 ложение, освобождают раму 1 от закрепления на опалубке, поднимают машину над забоем. Для уменьшения габарита машины в плане грейфер 6 подсоединяют к проушине 15. Сложенную таким образом машину через раструб проходческого полка (не по0 казан) поднимают на поверхность.
Формула изобретения
Грейферная породопогрузочная машина для проходки вертикальных шахтных стволов, включающая раму, поворотную в вертикаль5 ной и горизонтальной плоскостях стрелу, установленную на раме, телескопическую рукоять, наружная секция которой шарнирно соединена со стрелой, грейфер, шарнирно прикрепленный к концу внутренней секции телескопической рукояти, и приводы пере0 мещения рамы по стволу, поворота стрелы в вертикальной и горизонтальной плоскостях и поворота рукояти, отличающаяся тем, что, с целью повышения надежности работы путем предотвращения опрокидыва- , ния грейфера и упрощения конструкции, она снабжена выступами, прикрепленными к внутренней секции телескопической рукояти с возможностью взаимодействия с грейфером для предотвращения его опрокидывания при напорном внедрении в породу,
0 при этом привод перемещения рамы по ство лу и привод поворота стрелы в вертикальной плоскости выполнены в виде дистанционно установленной лебедки, канат которой прикреплен к стреле.
fPus.2
фиг.З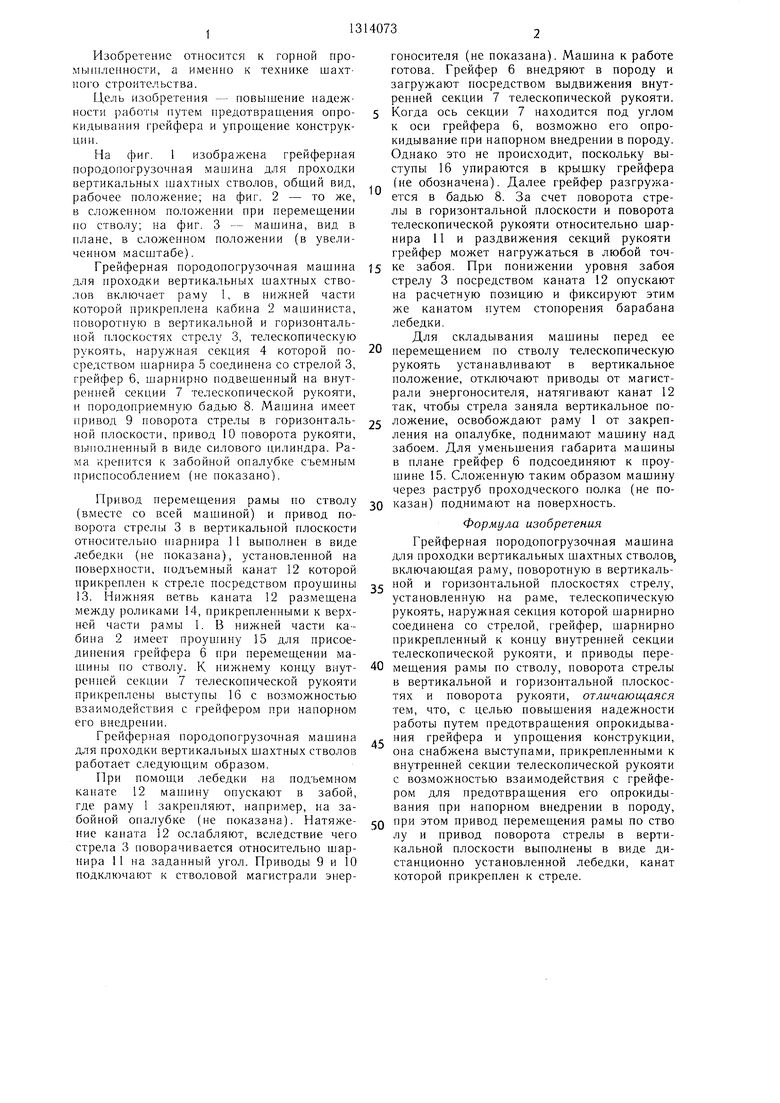
| название | год | авторы | номер документа |
|---|---|---|---|
| Породопогрузочная машина для проходки вертикальных стволов шахт | 1981 |
|
SU1038482A1 |
| Стволовое породопогрузочное устройство | 1978 |
|
SU866198A1 |
| Стволовая погрузочная машина | 1985 |
|
SU1321820A1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА | 2009 |
|
RU2418169C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
| Комплекс для проходки вертикальных стволов шахт | 1981 |
|
SU1006755A1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2362878C1 |
| Грейферная породопогрузочная машина | 1982 |
|
SU1020586A1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| Устройство для проходки шахтных стволов | 1980 |
|
SU901536A1 |

Изобретение относится к горной пром- ти, конкретно к технике шахтного строительства и позволяет повысить надежность работы путем предотвращения опрокидывания грейфера и упростить конструкцию. На раме 1 машины установлена поворотная в вертикальной и горизонтальной плоскостях стрела (С) 3. С ней шарнирно соединена наружная секция 4 телескопической рукояти. К концу внутренней секции 7 рукояти шарнирно прикреплен грейфер 6. К внутренней секции 7 прикреплены выступы 16. Машина имеет также привод поворота рукояти, а привод перемещения рамы по стволу и привод поворота С 3 в вертикальной плоскости выполнены в виде дистанционно установленной лебедки, канат 12 которой прикреплен к С 3. Когда ось секции 7 находится под углом к оси грейфера 6, возможно его опрокидывание при напорном введении в породу. Однако это не просходит, поскольку выступы 16 упираются в крышку грейфера 6. 3 ил. (Л со 4 О со
| Породопогрузчик для проходки вертикальных выработок | 1983 |
|
SU1129362A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кочетов В | |||
| В | |||
| Погрузка породы при проходке стволов | |||
| М.: Недра, 1968, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
