113
Изобрр.тение относится к области обргатр.нил полезных ископаемых, а более конкретно к системам и устрой-, ствам автоматического управления процессом флотации в колонных пневматических машинах.
Целью изобретения является повышение точности управления процессом флотации за счет снижения погрешности измерения параметров пульповоздуш- ной смеси в камере машины при различных аэрогидродинамических режимах флотации.
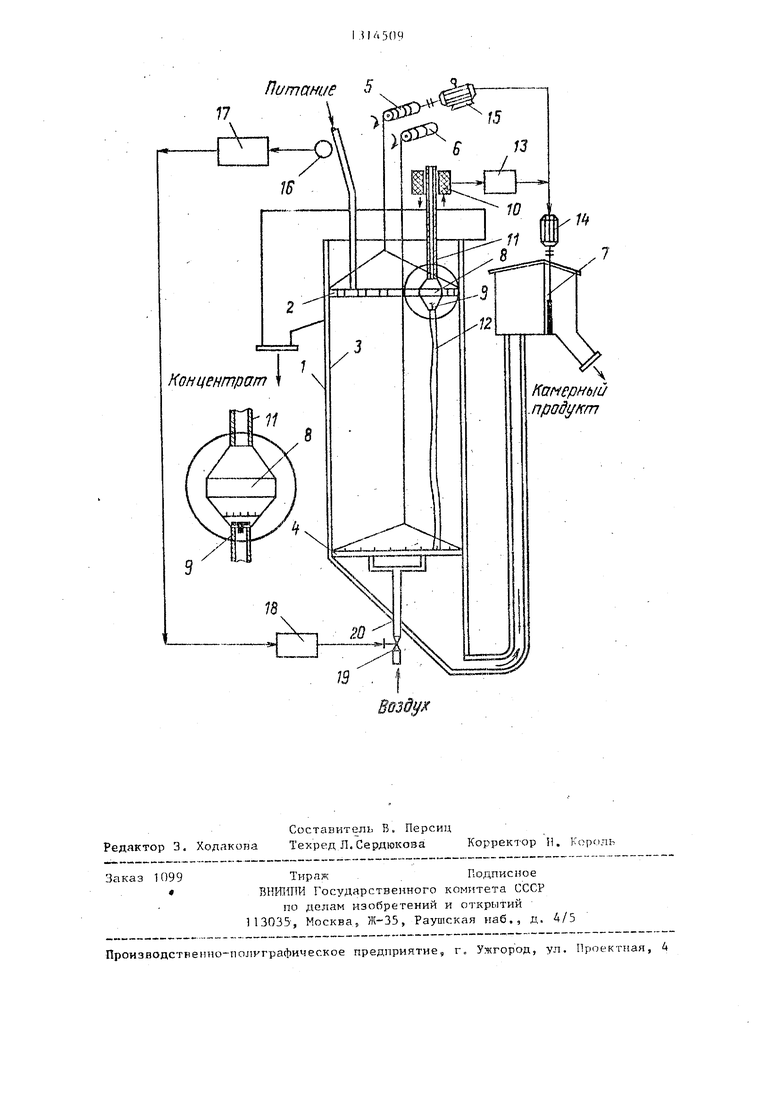
На чертеже приведена блок-схема устройства.
Устройство включает камеру 1 колонной машины, в верхней которой установлен питатель 2 исходной пульпы, направляющие 3, расположенные вдоль камеры 1 машины по всей ее высоте. Для перемещения дисперга- торов 4, уставновленных в нижней части камеры 1 машины, и питателя 2 снаружи машины установлены исполнительный механизм 5 перемещения питателя 2 и исполнительный механизм 6 перемещения диспергаторов А. Механизмь 5 и 6 составляют исполнительные механизмы перемеР1ений питателя исходной пульпы по высоте камеры мавшны. Машина также включает разгрузочный шибер 7 камерного продукта. Датчик параметров пульповоздушной смеси выполнен в виде поплавкового датчика 8 уровня пульповоздупиой смеси с обратным клапаном 9 и с индуктивным преобразователем 10 перемещения, сердечник 11 (например, стальной патрубок) которого установлен в верхней части поплавкового датчика 8, а обратный клапан 9 датчика 8 соединен, например, эластичным шлангом 12 с диспер.гатором А. Преобразователь 10 подключен к регу- лятору 13 уровня пульповозду1пной смеси. Выход регулятора соединен с приводом 1А, .сочлененга 1м с исполнитель- ньтм механизмом перемещения разгрузочного шибера 7 камерного продукта, а также с приводом 15, сочлененным с исполнительным механизмом 5 перемещения питателя 2. Снаружи машины установлен расходомер 16 исходной пульпь соединенный С регулятором 17 расхода воздуха, а выход регулятора 17 через исполнительный механизм 18 изменения расхода воздуха, подаваемого в дис- пергатор 4, связан с клапаном 19, установленным на воздушгюм трубопроводе 20.
92
Работа устройстпа ocyiiec типяетгя следуш шм образом.
Исходное и подготовленное к разделению питание - пульпа - поступает
в желоб питателя 2, который равномерно распределяет пульпу по сечению камеры 1 машины. Воздух, поступающий в камеру 1 машины через диспергаторы 4, образует с пульпой.пульповоздужную
смесь, которая подвергается: флотаци- онному обогащению. При этом,в зависимости от характера исходного питания, разделяемых компонентов и требований, предъ являёмьт к .технологичес
КИМ условиям флотационного процесса, посредством исполнительного механизма 5 и исполнительного механизма б создают требуемое соотношение высот зон извлечения и очистки флотируемого ценного компонента (угля, полиметаллических руд и др.) .
Пенный продукт, содержаг 1 1Й гидро- фобизированные компоненты, направля - ется на операции дальнейшего передела,
а камерный продукт, содержащий гидро- филизированные компоненты, удаляется через разгрузочный шибер 7. В процесг се ведения флотации часто возникает необходимость изменения расхода воздуха, подаваемого на флотадию чере:з диспергаторы 4, что обусловлено изменением расхода пульпы, поступающей н флотацию, ее плотностью, содержанием твердого и др.
Как видно на чертеже, изменение расхода пульпы, поступающей на флотацию, контролируется расходомером 16с Отклонение расхода пульпы, подаваемой на флотацию, от номинального
значения приводит в действие систему регулирования, которая включает регулятор 17, исполнительный механизм 18 и: клапан 19, В соответствии с отклонением подачи пульпы изменяется расход воздуха, подаваемого на флотацию через диспергаторы 4. ,
При этом изменение расхода воздуха вызывает соответствующее из менение высоты пенного слоя в камере машины и, как
следствие, варьирование соотношения зон извлечения и очистки. Однако в 3ITOM случае изменяется высота уровня пульповозду1лной смеси в камере и воз- дгикает необходимость определения границь пенного слоя для того, чтобы точно установить устройство для загрузки питателя 2 по высоте камеры маршны. Эта граница определяется с помощью поплавка датчика 8 уровня
313145б94
пульпопоздуинюй смеси. Ro ннyтpef нююФормула изобретения полость датчика заливается пульпа, Устройство управления процессом платность которой соответствует плот-флотации в колонной пневмат 1ческой нести пульпы, поступающей иа флота-мапжне, содержащее датчик параметров цию. Поплавковый датчик 8 уровня том- пульповоздушной смеси, последовательно устанавливается на границе зон из-но соединенные регулятор расхода возвлечения и очистки. Положение поплавкового датчика 8 фиксируется индук- тивньЕм преобразователем 10 перемещения, сигнал с которого, воздействуя fO на регулятор 13, обеспечивает перемещение питателя 2 по высоте камеры машины до точной остановки его под пенным слоем, т.е. на границе зон извлечения и очистки фпотируемого ком- f5 понента.
При изменении расхода воздуха, подаваемого через диспергаторы А, изменяется плотность пульповоздушной 20 смеси в камере машины. Одновременно по эластичному полому шлангу 12 через обратный клапан 9 воздух от дис- пеагаторов А подается во внутреннюю Полость корпуса поплавкового датчи- 25 ка 8 уровня. Это обеспечивает изменение плотности пульповоздушной смеси, находящейся внутри корпуса датчика 8 уровня. За счет этого исключается ошибка установки датчика В 30 уровня, которая в известных аналогичных конструкциях в озникает из-за несоответствия плотностей сред в камере машины и внутри корпуса поплавкового датчика уровня. Таким образом, 35 при всех изменениях плотности пульповоздушной смеси в камере машины плотность пульповоздушной смеси внутри корпуса поплавкового датчика 8 будет точно соответствовать новому 40 значению плотности пульповоздушной флотируемой реды.
но
духа и исполнительный механизм изменения расхода воздуха, подаваемого в диспергатор, отличающее- с я тем, что, с целью повышения точ ности управления процессом флотации за счет снижения погрешности измерения параметров пульповоздушной смеси в камере машины при различных, аэрогйдродинамических режимах флотации, оно снабжено расходомером исходной пульпы, регулятором уровня пуль- повоздуюной смеси и исполнительными механизмами перемещений питателя исходной пульпы по высоте камеры машины и разгрузочного шибера камерного продукта, а датчик параметров пульповоздушной смеси выполнен в виде поплавкового датчика уровня пульповоздушной смеси с обратным клапаном и индуктивным преобразователем перемещения, сердечник последнего установлен в верхней части поплавкового датчика уровня,а обратный клапан уста-ч новлен в нижней части поплавкового датчика и соединен с диспергатором, при этом расходомер исходной пульпы соединен с регулятором расхода воздуха, а индуктивный преобразователь перемещения поплавкового датчика соединен с регулятором уровня пульповоздушной смеси, выход которого соединен с исполнительным механизмом перемещения питателя исходной пульпы по высоте камеры машины и с исполнительным механизмом перемещения разгрузочного шибера камерного продукта.
Формула изобретения Устройство управления процессом флотации в колонной пневмат 1ческой мапжне, содержащее датчик параметров пульповоздушной смеси, последовательно соединенные регулятор расхода возно
духа и исполнительный механизм изменения расхода воздуха, подаваемого в диспергатор, отличающее- с я тем, что, с целью повышения точ ности управления процессом флотации за счет снижения погрешности измерения параметров пульповоздушной смеси в камере машины при различных, аэрогйдродинамических режимах флотации, оно снабжено расходомером исходной пульпы, регулятором уровня пуль- повоздуюной смеси и исполнительными механизмами перемещений питателя исходной пульпы по высоте камеры машины и разгрузочного шибера камерного продукта, а датчик параметров пульповоздушной смеси выполнен в виде поплавкового датчика уровня пульповоздушной смеси с обратным клапаном и индуктивным преобразователем перемещения, сердечник последнего установлен в верхней части поплавкового датчика уровня,а обратный клапан уста-ч новлен в нижней части поплавкового датчика и соединен с диспергатором, при этом расходомер исходной пульпы соединен с регулятором расхода воздуха, а индуктивный преобразователь перемещения поплавкового датчика соединен с регулятором уровня пульповоздушной смеси, выход которого соединен с исполнительным механизмом перемещения питателя исходной пульпы по высоте камеры машины и с исполнительным механизмом перемещения разгрузочного шибера камерного продукта.
Питание 5
17
ч
Каперный .npodi/кт
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом флотации в пневматической колонной машине | 1985 |
|
SU1314508A1 |
| Способ управления процессом флотации в пневматической флотационной колонной машине с прямоточными и противоточными емкостями и устройство для его осуществления | 1986 |
|
SU1445798A1 |
| Устройство для управления процессом флотации в пневматической колонной флотационной машине | 1990 |
|
SU1750734A2 |
| Способ управления процессом флотации в пневматических колонных флотационных машинах и устройство для его осуществления | 1984 |
|
SU1169752A1 |
| Способ управления процессом флотации в пневматической колонной машине | 1987 |
|
SU1489841A1 |
| Устройство для управления процессом колонной флотации | 1989 |
|
SU1695990A1 |
| Способ управления процессом флотации в многоемкостных флотационных колонных пневматических машинах | 1987 |
|
SU1457254A1 |
| Пневматическая флотационная машина | 1984 |
|
SU1233946A2 |
| Способ регулирования процесса пенной сепарации и устройство для его осуществления | 1985 |
|
SU1332608A1 |
| Флотационная машина | 1988 |
|
SU1660756A1 |
Изобретение относится к области обогащения полезных искогг; емых и позволяет с высокой точностью управлять процессом флотап.ни за счет снижения погрешности измерения параметров пульповоздушной смеси (Г11;С) в камере 1 машины при различных аэрогидродинамических режимах флотап.. В камере 1 установле)- меремрпгаемый по направ,1тяю1тп1м 3 питатель 2 исходной пульпы, а п ее нижней части установлены диспергаторь (Д) 4. Посродст1зом эластичного шланг; . 12 через обратный клапан 9 с Д 4 связан поплавковый датчик 8 . Питатель 2 и Д 4 перемещаются по высоте камеры 1 иснолни- тельными механизмами (ИМ) 5 и 6 соответственно. Закрепленный в поплавке датч ика 8 сердечник I 1 переме1цается . внутри индуктивного преобразователя 10. Он фиксирует положение датчика 8 и выходным сигналом воздействует на регулятор 13, соединенный через приводы 14 и 15 с ИМ 7 и 5. Снаружи машины установлен расходомер 16 исходной пульпы и двяза н с. регулятором 17 расхода воздуха. Его выход через ИМ 18 соединен с установленным в трубопроводе 20 подачи врзду: а в Д 4 клапаном 19. В соответствии с плотностью ПВС в камере 1 р егу.пируется плотность ПВС внутри корпуса датчика 8, что исключает ошибку его установки. I ил. с f С со ИжА 4 СГ1
Составитель В. Персиц Редактор 3. Ходлкоиа Техред Л.Сердюкова Корректор П. :ороль
Заказ 1П99
«
Тираж .Подписное
ВНКЮТИ Государственного комитета СССР
по делам изобретений и открытий 1 13035, Москва, )К-35, Рауп1ская наб,, д. А/5
Производстветю-иолиграфическое предприятие, г. Ужгород, ул. Проектная, 4
