Гим7
Utu
Изобретение относится к автоматизации сельскохозяйственного производства, в частности к способам распознавания валка растений или хлебостоя на фоне стерни, и может быть использовано для автоматического направления движения зерноуборочного комбайна относительно валка растений или хлебостоя.
Цель изобретения - повышение надежности и быстродействия распознавания валка растений или хлебостоя на фоне стерни.
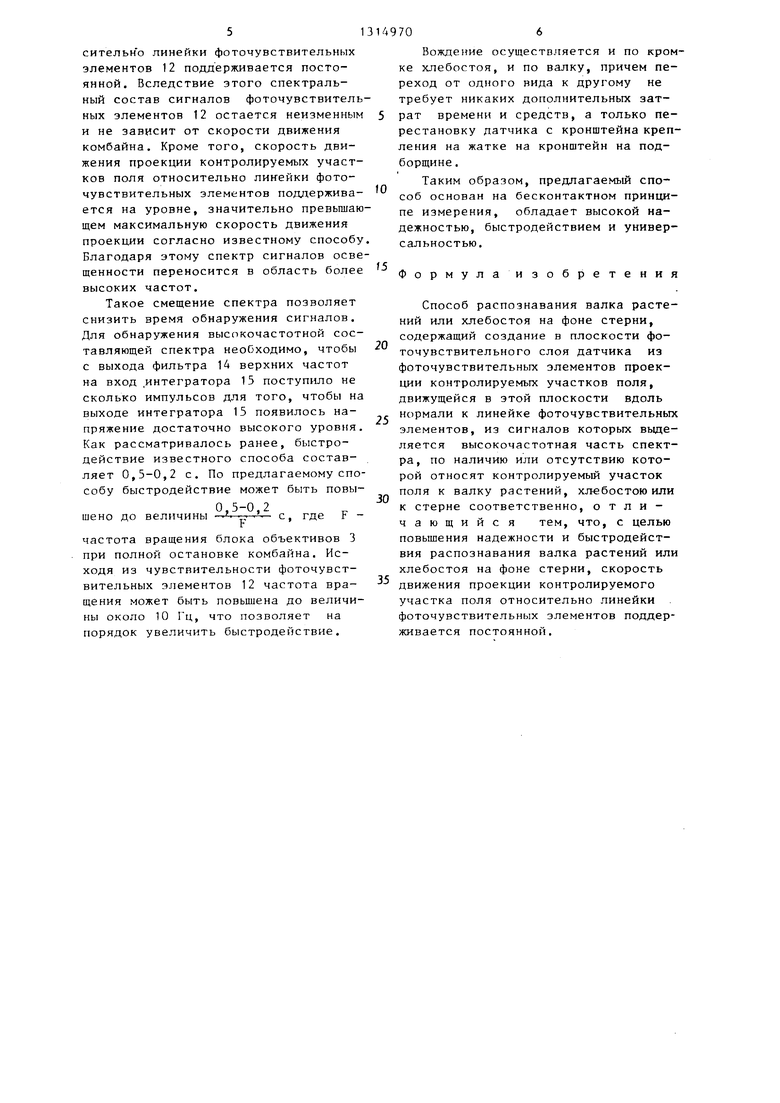
На фиг. 1 представлена структурна схема датчика, реализующего предлагаемый способ, на фиг. 2 - схема передачи изображения участка поля на фоточувствительные элементы, на фиг.3 структурная схема включения электродвигателя датчика, на фиг. 4 - принципиальная электрическая схема датчика, на фиг. 5 - принципиальная- электрическая схема включения электродвигателя датчика.
Датчик 1 содержит неподвижную линейку 2 с фоточувстБительными элементами, установленную в фокальной плоскости вращающегося блока объективов
3.Выходы каждого из фоточувствительных элементов линейки 2 связаны с входами соответствующих усилителей
4,выходы которых подключены к входам соответствующих фильтров 5 верхних частот. Выходы фильтров 5 соединены с входами суммирующего усилителя 6. Блок объективов 3 приводится
во вращение электродвигателем 7. Датчик 1 заключен в неподвижный изолирующий корпус 8, в нижней части которого имеется прозрачное окно 9. К электродвигателю 7 подключен блок 10 управления скоростью вращения объективов 3, свиэанньи с датчиком 11 скорости движения комбайна. Линейка фоточувствительных элементов 2 представляет собой линейку фототранзисторов 12, коллекторы которых подключены к положительному полюсу источника питания (+и„), а эмиттеры - к входам усилителей 4. Усилитель 4 собран по известной схеме на операционном усилителе (ОУ) 13. В качестве ОУ во всех блоках датчика использованы микросхемы К140УД6.
Фильтр 5 верхних частот представляет собой двухкаскадный фильтр, первый каскад которого собран на ОУ 14 по известной схеме. Второй каскад
20
25
149702
фильтра 5 представляет собой интегратор, собранный по известной схеме на ОУ 15. Он необходим для преобразования импульсного напряжения с вы5 хода первого каскада фильтра в постоянное. Суммирующий усилитель 6 собран также по известной схеме на ОУ 16.
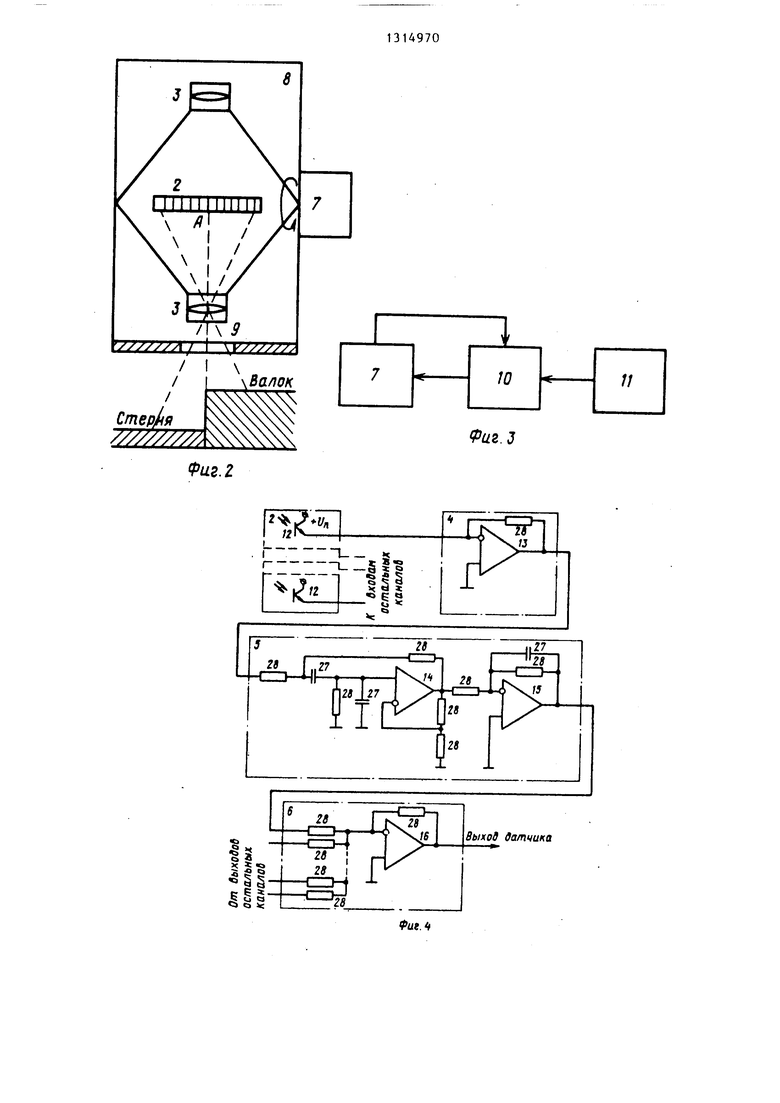
Датчик 11 скорости представляет
собой индукционный датчик 17. Частота сигнала на выходе датчика 17 пропорциональна скорости вращения зубчатого колеса 18, установленного на оси левого ведущего колеса комбайна. Электродвигатель 7 блока объективов 3 также имеет индукционный датчик 19. Частота сигнала на выходе датчика 19 пропорциональна скорости врацения зубчатого колеса 20, установленного на валу электродвигателя 7.
Блок 10 управления скоростью вращения объективов представляет собой двухканальную схему, в состав каждого из каналов которой входят известный триггер Шмитта на ОУ 21, ОУ 22 и известный преобразователь 23, 24 частота - напряжение. В состав блока 10 входят также суммирующий усилитель, собранный по известной схеме на ОУ 25, и-змиттерный повторитель на транзисторе 26. Выходы индукционных датчиков 17 и 19 подключены к входам соответствующих триггеров Шмитта 21 и 22, выходы которых
35 подключены к входам соответствующих преобразователей 23 и 24, выходы последних подключены к соответствующим входам суммирующего усилителя 25, а его выход через эмиттерный повторитель 26 подключен к электродвигателю 7. На фиг. 4 и 5 обозначены также конденсаторы 27 и резисторы 28.
Способ осуществляется следующим
45 образом.
Датчик 1 устанавливается на зерноуборочном комбайне по левому краю жатки или на подборщике на определенном расстоянии от центра. Блок
5Q объективов 3 приводится во вращение электродвигателя 7 и создает в плос- . кости линейки 2 фоточувствительных элементов 12 проекцию контролируемых участков поля, движущуюся вдоль нор55 мали к этой линейке. Вращение происходит против хода комбайна в вертикальной плоскости, параллельной продольной оси комбайна. В фокальной плоскости объективов 3 в момент
30
31
их совмещения с прозрачным окном 9 возникает бегущее изображение участка поля перед комбайном, которое преставляет собой чередование темных и светлых полос. При этом проекция границы раздела находится в точке А, На фоточувствительные элементы линейки 2 (слева от точки А) проектируется изображение только хлебостоя или валка, а справа от точки А - только стерни, и на их выходах появляются сигналы освещенности, соответствующие текущему значению освещенности участков поля, которые проектируются на конкретный фоточувствительный элемент. Сигналы фоточувствительных элементов 12 проходят далее через усилители 4 и фильтры 5 верхних частот, где из них выделяются высокочастотные составляющие. Эти составляющие преобразуются интегратором фильтров 5 в постоянное напряжение. Выходной сигнал суммирующего усилителя 6, пропорциональный сумме сигналов фильтров 5, пропорционален количеству фоточувствительных элементов 12, находящихся над валком. Количество таких фоточувствительных элементов определяет величину отклонения комбайна от границы раздела контролируемых участков поля.
Длд того, чтобы сигналы фоточув- ствительных элементов 12 не зависели от скорости движения комбайна, скорость вращения вала рлектродви- гателя 7 с блоком объективов 3 регулируется блоком 10 управления скоростью вращения. На входы блока 10 подаются сигналы индукционных датчиков 17 и 19, имеющие квазисинусоидальную форму, частота которых пропорциональна скорости движения комбайна и скорости вращения вала двигателя 7 соответственно. Триггеры Шмитта на ОУ 21 и 22 преобразуют квазисинусоидальные сигналы этих датчиков в сигналы прямоугольной формы. В каждом из каналов блока 10 частоты указанных сигналов преобразуются в напряжения на выходах соответствующих преобразователей 23 и 24, амплитуды которых пропорциональны частоте сигналов, снимаемых с индукционных датчиков.
Функцией блока 10 является поддержание частоты вращения вала двигателя 7 на уровне, необходимом для создания с помощью блока вращающих
704
ся объективов 3 движущейся с постоянной скоростью относительно линейки фоточувствительных элементов 2 проекции контролируемых участков поля. Эта скорость состоит из двух составляющих, первая из которых пропорциональна угловой скорости вращения блока объективов 3 или, что то же самое, угловой скорости вращения зубчатого колеса 20, а вторая - скорости движения комбайна или, что то же самое, скорости вращения зубчатого колеса 18. Для поддержания скорости движения проекции контролируемых участков поля на постоянном уровне необходимо поддерживать на данном уровне сумму составляющих этой скорости. В блоке 10 зту функцию выполняет суммирующий усилитель на ОУ 25.
Для суммирования напряжений с выходов преобразователей 23 и 24, пропорциональных частоте вращения зуб- чатьк колес 18 и 20, введены весовые коэффициенты, устанавливаемые входными делителями напряжения усилителя. На неинвертирующий вход усилителя 25 подается напряжение порога, с помощью которого устанавливают необходимое значение частоты вращения электродвигателя 7. Предположим,что комбайн снижает скорость движения.
Тогда сигнал на выходе преобразователя 23 уменьшается, что приводит к уменьшению сигнала на инвертирующем входе усилителя 25 ниже установленного порога. Это в свою очередь приводит к возростанию сигнала на выходе усилителя 25 и выходе эмиттерного повторителя 26, напряжение на электродвигателе 7 возрастает, что приводит к увеличению скорости вращения зубчатого колеса 20 и блока объективов 3. Скорость вращения
вала электродвигателя 7 возрастает до тех пор, пока возрастание сигнала на выходе преобразователя 24, обус-. ловленное увеличением частоты вращения зубчатого колеса 20, не приведет
К возрастанию сигнала на инвертирующем входе усилителя 25 до величины порога. При возрастании скорости комбайна рассмотренный процесс повторяется, с той лишь разницей, что
сигнал на выходе усилителя 25 уменьшается, что приводит к снижению скорости вращения вала двигателя 7. Тем самым скорость движения проекции контролируемых участков отно
51
сительно линейки фоточувствительных элементов 12 поддерживается постоянной. Вследствие этого спектральный состав сигналов фоточувствительных элементов 12 остается неизменным и не зависит от скорости движения комбайна. Кроме того, скорость движения проекции контролируемых участков поля относительно ликейки фоточувствительных элементов поддерживается на уровне, значительно превышающем максимальную скорость движения проекции согласно известному способу Благодаря этому спектр сигналов освещенности переносится в область более высоких частот.
Такое смещение спектра позволяет снизить время обнаружения сигналов. Для обнаружения высокочастотной составляющей спектра необходимо, чтобы с выхода фильтра 1А верхних частот на вход .интегратора 15 поступило не сколько импульсов для того, чтобы на выходе интегратора 15 появилось напряжение достаточно высокого уровня. Как рассматривалось ранее, быстродействие известного способа составляет 0,5-0,2 с. По предлагаемому способу быстродействие может быть повы0.5-0,2 шено до величины с, где F частота вращения блока объективов 3 при полной остановке комбайна. Исходя из чувствительности фоточувствительных элементов 12 частота вращения может быть повышена до величины около 10 Гц, что позволяет на порядок увеличить быстродействие.
149706
Вождение осуществляется и по кромке хлебостоя, и по валку, причем переход от одного вида к другому не требует никаких дополнительных зат- 5 рат времени и средств, а только перестановку датчика с кронштейна крепления на жатке на кронштейн на под- борщине.
Таким образом, предлагаемый способ основан на бесконтактном принципе измерения, обладает высокой надежностью, быстродействием и универсальностью.
10
Г5
Формулаизобретения
0
0
5
Способ распознавания валка растений или хлебостоя на фоне стерни, содержащий создание в плоскости фоточувствительного слоя датчика из фоточувствительных элементов проекции контролируемых участков поля, движущейся в этой плоскости вдоль , нормали к линейке фоточувствительных элементов, из сигналов которых выделяется высокочастотная часть спектра, по наличию или отсутствию которой относят контролируемый участок поля к валку растений, хлебостою или к стерне соответственно, отличающийся тем, что, с целью повышения надежности и быстродействия распознавания валка растений или хлебостоя на фоне стерни, скорость движения проекции контролируемого участка поля относительно линейки фоточувствительных элементов поддерживается постоянной.
7Т
У77/777.
Валок
Фиг.З
Фиг. 2
Pt
t. %
JS Jj « cj о X

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания валка растенийили ХлЕбОСТОя HA фОНЕ СТЕРНи | 1979 |
|
SU818517A1 |
| Устройство для обнаружения дефектов полотна | 1989 |
|
SU1694745A1 |
| Способ получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, и устройство для его реализации | 2017 |
|
RU2653087C1 |
| Способ контроля передаточной функции оптической системы и устройство для его осуществления | 1985 |
|
SU1318821A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1994 |
|
RU2100777C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| Способ контроля качества оптических систем и устройство для его осуществления | 1985 |
|
SU1276940A1 |
| Устройство автоматического регулирования нагрузки угледобывающего комбайна | 2020 |
|
RU2747136C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ ТЕЛ ВРАЩЕНИЯ | 2000 |
|
RU2164664C1 |
Изобретение относится к области автоматизации сельскохозяйственного производства. Цель изобретения - повышение надежности и быстродействия распознавания. Датчик 1 устанавливается на зерноуборочном комбайне по левому краю жатки или на подборщике на определенном расстоянии от центра. Блок объективов приводится во вращение электродвиCmfflH гателем и создает в плоскости линейки 2 фоточувствительных элементов проекцию контролируемых участков поля, движущуюся вдоль нормали к этой линейке. Вращение происходит против хода комбайна в вертикальной плоскости, параллельной продольной оси комбайна. Сигналы фоточувствительных элементов проходят далее через усилители 4 и фильтры 5 верхних частот, где из них вьщеляются высокочастотные составляю1цие. Эти составляющие преобразуются интегратором фильтра 5 в постоянное напряжение. Выходной сигнал суммирующего усилителя 6, пропорциональный сумме сигналов фильтров 5, пропорционален количеству фоточувствительных элементов, находящихся над валком. Скорость вращения вала электродвигате- . ля с блоком объективов регулируется блоком управления скоростью вращения. 5 ил. Валек I (Л :о п 
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU648156A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ распознавания валка растенийили ХлЕбОСТОя HA фОНЕ СТЕРНи | 1979 |
|
SU818517A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
