:
Изобретение относится к сельскому xtiзяй,ст&у, а именно к устройствам автоматического всждения самоходных агрегатов.
Известны устройства автоматического направлениядвижения самоходных агрегатов, содержащие фотооптический датчик, блок управления и исполнительный механйзм (.
Недостатком таких устройств является низкая надежность в работе.
Наиболее близким к изобретению по техической сущности является устройство, которое состоит из фотооптического преобразователя, формирующего усилителя,управляемой линии задержки, Т4)иггеров и исполнительного механизма |2.
Фотооптический преобразователь преобразует световую информацию-о сканируемом участке с базовой „линией в электрический.сигнал. Формирующий усилитель преобразует этот сигнал в узкий стандартный пр амплитуде и длительности импульс, временИое положение которб Р-о соответствует MOMiEHTy пересечения базовой линией оптической оси фотооптического преобразователя. Сигналый импульс подается на раздельны(е входы триггеров, на второе входы ко„тОрых подаются опорные импульсы, быходные сигналы триггеров управляют дополнительным механизмом.
Недостатком этого устройства является то, что временное соотношение сигнального импульса относительно опорных импульсов. несет информацию только о поперечном смещений самоходного агрегата относитель; но участка базовой линии. При этом отсутствует информация о направлении базовой линии относительно продольной Оси самоходного агрегата, что Приводит к появлению колебательного режима при движении самоходного агрегата на повышенных скоростях и снижает точность управления.
Целью изобретения является повышение точности управления при высоких скоростях движения самоходных агрегатов. /
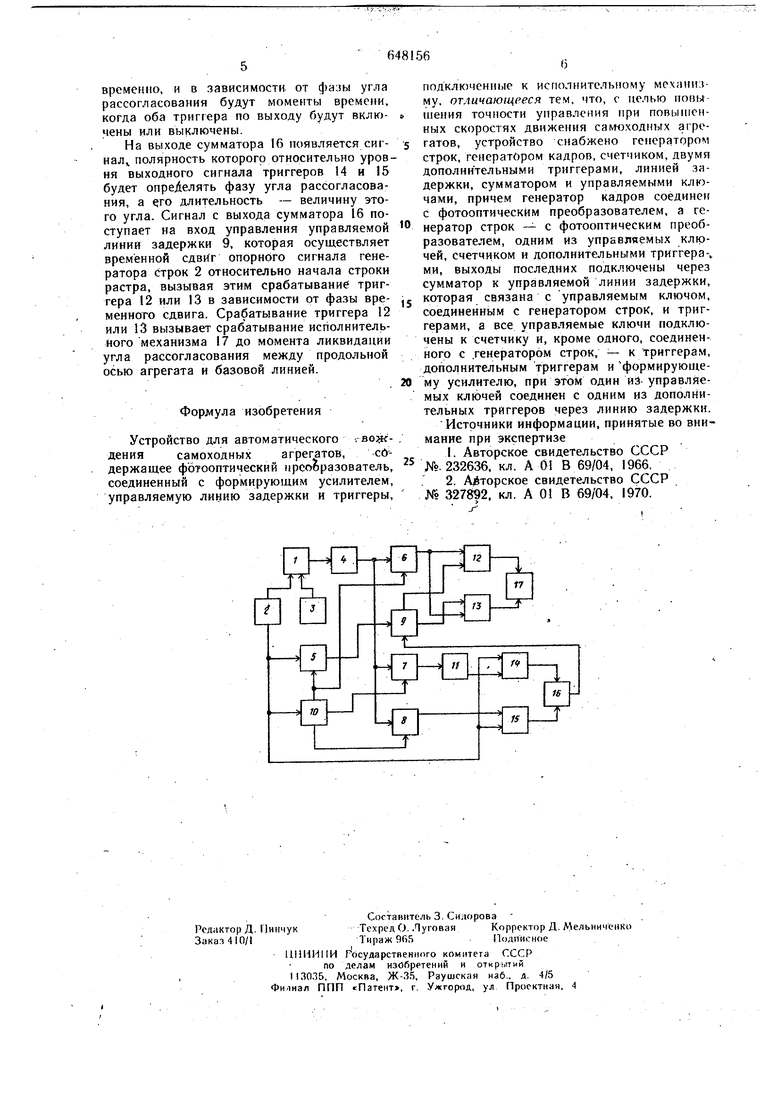
Это достигается тем, что устройство снабжено генератором строк, генератором кадров, счетчиком, двумя дополнительными-три герами, линией задержки, сумматором и управляемыми ключами, причем генератор кадров соединен с фотооптическим преобразователем, а генератор строк - с фотооптическим преобразователем, одним из управляемых ключей, счетчиком н дополиитель нымй трттерами, выходы последних полклю чсны через сумматор к управляемой линии задержки, которая связана с управляемым .ключом, соединенным с генератором строк, и триггерами, а всё управляемые ключи подключены, к счбтчику и, кроме одного, соединенного с генератором строк, - к триггерам, дополнительным триггерам и формирующему усилителю, при этом один из управляемых ключей соединен с одним из дополнительных триггеров через линию задерж ни,,; На чертеже дана структурная схема пред лагаемого устройства. Устройство состоит из фотооптического преобразователя 1, генератора строк 2 и генератора кадров 3, формирующего усилителя 4, управляемых ключей 5, 6, 7, 8, управляемой линии задержки 9, счетчика 10, линии задержки И, триггеров 12, 13 и дополнительных триггеров 14, 15, сумматора 16 и исполнительного механизма 17Устройство работает следующим образом. Устро1 :ство устанавливается на самоходном агрегате, причем продольная ось фотооптического преобразователя 1 (видикона) совмеи ается с базовой линией. Сигналы с генератора строк 2 и генератора кадров 3, представляющих собой анализирующее устройство, поступают на отклоняющую систему развертки фотооптического преобразователя 1, Развертка осуществляется в три строки. На фоточувствительный слой фотооптического преобразователя проектируется анализируемый участок поверхности с базовой линией, которая определяет границу раздела обработанного и необработанного земельного участка.. Сигнал с выхода фотооптического преобразователя имеет амплитудный перепад, временное положение которого соответствует моменту пересечения оптической осью этого преобразователя базовой линии. Этот сигнал усиливается и формируется усилителем 4, на выходе которого получается нормализованный по амплитуде и длительности импульс. При этом временное положение импульса от начала строки растровой развертки пропорционально положению базовой линии относительно границы сканируемого участка. Сигнал с выхода фор.мирующего усилителя 4 подается, на сигнальные выходы управляемых ключей 6, 7, 8, В свою очередь входы управления этих ключей управляются выходными сигналами счетчика 10, синхронизируемого генератором строк 2, Управляемь1Й ключ 6 пропускает сигнал изображения, соответствующий средней строке растра и несущий информацию о поперечном смещении агрегата относительно базовой линии. Этот сигнал, поступает на раздельные входы триггеров 12 и 13, на вторые входы которых через уп. равляемый ключ 5 и управ,7яомую линию задержки 9 поступают опорные сигналы генератора строк 2, Управляемый ключ 5 управляется выходным сигналом счетчика 10 и прспускает опорный сигнал генератора строк 2 на линию задержки 9 только зо йремя прохождения средней строки растра и этим исключает срабатывание триггеров 12 и 13 во время прохождения первой и последней строк растра. Управляемая линия задержки 9 производит временное разделение опорного сигнала генератора строк 2 для управления триггерами 12 и 13 так, что при нахождении агрегата на заданной траектории движения сигналы иа выходах триггеров 12 и 13 отсутствуют-. При отклонении агрега-; та от базовой линии временное соотнощенио опорных сигналов и выходного сигнала формирующего усилителя 4 изменяется, что вызывает срабатывание одного из триггеров 12 и 13 в зависимости от фазы отклонения агрегата от базовой линии, С выходов триггеров сигналы, несущие информацию о величине и фазе отклонения агрегата от базовой линии, поступают на исполнительный механизм 17, кЬторый возвращает агрегата исходное положение. Управляемый ключ 7 выделяет сигнал сканируемого учдстка с базовой линией, соответствующий первой строке растра, С выхода управляемого ключа 7 этот сигнал через линию задержки 11 поступает на раздельный вход триггера 14- Управляемый ключ 8 выдает сигнал сканируемого участка с базовой линией, соответствующий последней строке растра, С выхода управляемого ключа 8 этот сигнал поступает на раздельный(3ход триггера 15, Линия задержки 11 осуществляет временное согласование сигнала первой строки растра с сигналом последней строки растра. На вторые входы триггеров 14 и 15 поступает опорный сигнал с выхода генератора строк 2, С выходов триггеров 14 и 15 сигналы поступают на сумматор 16, Опорный сиг- . нал генератора строк 2 поддерживает триггер 14 во включенном состоянии по его выходу, а триггер 15 - в выключенном состоянии. При отсутствии угла рассогласования между продольной осью агрегета и базовой линией сигналы с выходов линии задержки 11 и управляемого ключа 8 одновременно поступают на раздельные входы триггеров 14 и 15, поочередно изменяя их состояние. Таким образом, на выходе сумматора 16 будет постоянный по амплитуде сигнал, определяемый выходным сигналом того или иного триггера,. При появлении угла рассогласования между продольной осью агрегата и базо-вой линией, выходные сигналы линии задержки II и управляемого ключа 15 поступают на ра,здельные входы триггеров Н я 15 с временным сявиго. один относительно другого. При этом срабсггываиис тр: геров 14 и 15 будет происходить не одиовременно, и в зависимости от фазы угла рассогласования будут моменты времени, когда оба триггера по выходу будут включены или выключены. На выходе сумматора 16 появляется сигнал полярность которого относительно уровня выходного сигнала триггеров 14 и 15 будет определять фазу угла рассогласования, а его длительность - величину этого угла. Сигнал с выхода сумматора 16 поступает на вход управления управляемой линии задержки 9, которая осуществляет временной сдвиг опорного сигнала генератора строк 2 относительно начала строки растра, вызывая этим срабатывание триггера 12 или 13 в зависимости от фазы временного сдвига. Срабатывание триггера 12 или 13 вызывает срабатывание исполнительного механизма 17 до момента ликвидации угла рассогласования между продольной осью агрегата и базовой линией. Формула изобретения Устройство для автоматического . во; дения самоходных агрегатов, содержащее фотооптический преобразователь, соединенный с формирующим усилителем, управляемую линию задержки и триггеры, подключенные к исполнительному механизму, отличающееся тем, что, с целью повышения точности управления при повышенных скоростях движения сам зходиых агрегатов, устройство снабжено генератором строк, генератором кадров, счетчиком, двумя дополнительными триггерами, линией задержки, сумматором и управляемыми ключами, причем генератор кадров соединен с фотооптическим преобразователем, а генератор строк -- с фотооптическим преобразователем, одним из управляемых ключей, счетчиком и дополнительными триггерами, выходы последних подключены через сумматор к управляемой линии задержки, которая связана с управляемым ключом, соединенным с генератором строк, и триггерами, а все управляемые ключи подключены к счетчику и, кроме одного, соединенного с генератором строк, - к триггерам, дополнительным триггерам и формирующему усилителю, при этом один из управляемых ключей соединен с одним из дополнительных триггеров через линию задержки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР Ж 232636, кл. А 01 В 69/04, 1966, 2.Авторское свидетельство СССР № . кл. А О В 69/04, 1970. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| ЦИФРОВАЯ СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2005 |
|
RU2292127C1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ ВЫСОКОЙ ЧЕТКОСТИ | 2000 |
|
RU2194370C2 |
| ЦИФРОВАЯ СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2004 |
|
RU2256298C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2007 |
|
RU2351094C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2005 |
|
RU2298297C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2006 |
|
RU2326508C1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 1999 |
|
RU2165681C1 |
