Техническое решение относится к области управления горными машинами и может быть использовано для автоматического регулирования нагрузки угледобывающего комбайна.
Известен регулируемый электропривод угольного комбайна (А.С. №1795096 МПК8 Е21С 35/24, опубл. 15.02.1993 г.), содержащий преобразователь частоты, к выходу которого подключены электродвигатели подачи, датчики тока двигателей подачи, двигатели резания, подключенные к сети переменного тока, датчики токов резания, блоки выделения максимального сигнала тока от двигателей подачи и двигателей резания, регулятор нагрузки, задатчик интенсивности, сумматор, элемент сравнения, пороговый элемент, однополярный усилитель, три источника опорного сигнала.
Устройство обеспечивает постоянную заданную нагрузку привода резания в условиях изменения крепости угля посредством ПИ-регулятора нагрузки, для которого требуется настройка его параметров пропорционального и интегрального коэффициентов.
Недостатком данного устройства является то, что коэффициенты ПИ-регулятора подобраны оптимально для определенной крепости угля, т.е. для конкретного состояния объекта управления. При изменении крепости угля данные значения коэффициентов уже не позволяют получать оптимальные по качеству переходные процессы (перерегулирование и время установления). Поэтому устройство обладает низким быстродействием в широком диапазоне изменения крепости угля.
Наиболее близким аналогом к предлагаемому техническому решению является устройство автоматического регулирования скорости подачи угледобывающего комбайна (А.С. №1344899, МПК8 Е21С 35/24, опубл. 15.10.87 г.), содержащее блок деления и регулятор скорости подачи, выход которого соединен с входом привода угледобывающего комбайна, в выходные цепи которого включен датчик тока резания. Устройство снабжено регулируемым усилителем, источником опорного сигнала, сумматором, задатчиком тока резания и фильтром низкой частоты, причем регулятор скорости подачи состоит из операционного усилителя, в цепь отрицательной обратной связи которого включены последовательно соединенные конденсатор и выходная цепь резисторной оптопары, а также из двух входных резисторов, к первому из которых подключен задатчик тока резания, при этом выход датчика тока резания подключен к входу фильтра низкой частоты, выход которого связан с вторым входным резистором регулятора скорости подачи и с входом регулируемого усилителя, выход которого соединен с первым входом сумматора, второй вход которого подключен к источнику опорного сигнала, а выход сумматора соединен с первым входом блока деления, выход которого подключен к входным цепям резисторной оптопары, а выход операционного усилителя, являющийся выходом регулятора скорости подачи, соединен со вторым входом блока деления.
Однако недостатком данного устройства является низкое быстродействие в широком диапазоне изменения крепости угля. Это объясняется наличием достаточно инерционной резистивной оптопары в схеме ПИ-регулятора, а также отсутствии подстройки коэффициента интегральной части ПИ-регулятора в зависимости от изменения крепости угля.
Техническим результатом заявляемого устройства является повышение быстродействия системы регулирования в условиях изменяющихся параметров объекта управления (крепости угля) с целью обеспечения заданного качества переходного процесса.
Указанный технический результат достигается тем, что в известное устройство автоматического регулирования нагрузки угледобывающего комбайна, содержащее источник задающего сигнала, сумматор и ПИ-регулятор, выход которого соединен с входом привода угледобывающего комбайна, в выходные цепи которого включен датчик тока резания, выход которого соединен с входом фильтра нижних частот, причем, в него дополнительно введены два блока временной задержки и нейросетевой блок, первый вход которого соединен с первым входом регулятора и выходом сумматора, причем первый вход и выход регулятора соответственно через первый и второй блоки временной задержки соединены соответственно со вторым и третьим входами нейросетевого блока, первый и второй выходы которого соединены соответственно со вторым и третьим входами регулятора, а выход источника задающего сигнала соединен с первым входом сумматора, второй вход которого подключен к выходу фильтра нижних частот.
Существенными отличиями предлагаемого устройства является введение двух блоков временной задержки и нейросетевого блока, выполнение ПИ-регулятора в виде интегратора, двух перемножителей и сумматора, а также новая организация связей между элементами устройства. Совокупность элементов и связей между ними обеспечивают достижение положительного эффекта - повышения быстродействия устройства.
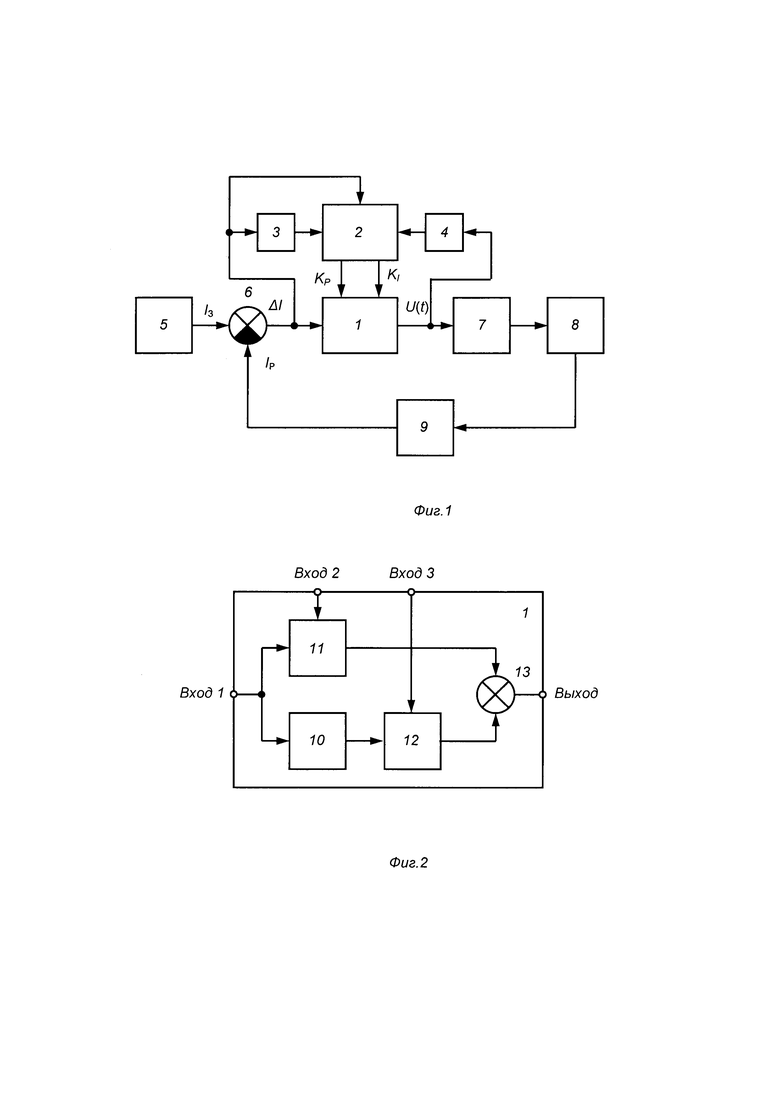
Сущность предлагаемого устройства поясняется чертежами. На фиг. 1 приведена функциональная схема устройства, на фиг. 2 - функциональная схема ПИ-регулятора, на фиг. 3 - схема модели для создания обучающей выборки нейросетевого блока, реализованная в Matlab/Simulink; на фиг. 4 - результаты математического моделирования предлагаемого устройства.
Устройство автоматического регулирования нагрузки угледобывающего комбайна (фиг. 1) содержит ПИ-регулятор 1, нейросетевой блок 2, блоки временной задержки 3, 4, источник задающего сигнала 5, сумматор 6, привод угледобывающего комбайна 7, датчик тока резания 8, фильтр нижних частот 9. ПИ-регулятор 1 содержит интегратор 10, два перемножителя 11, 12 и сумматор 13.
Работает устройство автоматического регулирования нагрузки угледобывающего комбайна следующим образом.
Регулятор нагрузки ПИ-регулятор 1, обеспечивает поддержание на заданном уровне тока электродвигателя резания Ip, сигнал о величине которого снимают с датчика тока резания 8 привода комбайна 7 и после прохождения через фильтр нижних частот 9 поступает на второй (вычитающий вход) сумматора 6. Этот сигнал вычитают из сигнала задания I3, который поступает на первый вход сумматора 6 с выхода источника задающего сигнала 5. В результате сравнения заданного I3 и измеренного (фактического) тока резания Ip вырабатывают сигнал рассогласования ΔI=I3-Ip, который передают на первый вход ПИ-регулятора 1: непосредственно на первый вход перемножителя 11 и через интегратор 10 на второй вход перемножителя 12. На вторые входы перемножителей 11 и 12 подают сигналы с выхода нейросетевого блока 2, в котором производят расчет параметров ПИ-регулятора 1: второй вход перемножителя 11 соединен с П-каналом регулятора, второй вход перемножителя 12 соединен с И-каналом регулятора. Сигналы с выходов 11 и 12 суммируют в сумматоре 13 - суммируется пропорциональная составляющая сигнала KpΔI(t) и интегральная составляющая сигнала 
В результате ПИ-регулятор 1 вырабатывает управляющий сигнал U(t), который описывается следующим уравнением

где ΔI(t) - рассогласование между заданием и выходом объекта управления; KpKI - настраиваемые параметры регулятора.
Назначение нейросетевого блока - автоматическая коррекция (подстройка) коэффициентов ПИ-регулятора. Он представляет собой многослойную нейронную сетью прямого распространения сигнала. Нейронная сеть имеет архитектуру входной слой, скрытый слой, выходной слой. На входной слой, содержащий 3 нейрона, поступает: ошибка регулирования; задержанный на Δt сигнал ошибки регулирования, задержанный на Δt сигнал управления, формируемый ПИ-регулятором. В скрытом слое расположено 20 нейронов и сигмоидальная функция активации, в выходном слое - 2 нейрона, соответствующие коэффициентам ПИ-регулятора KP и KI и линейная функция активации.
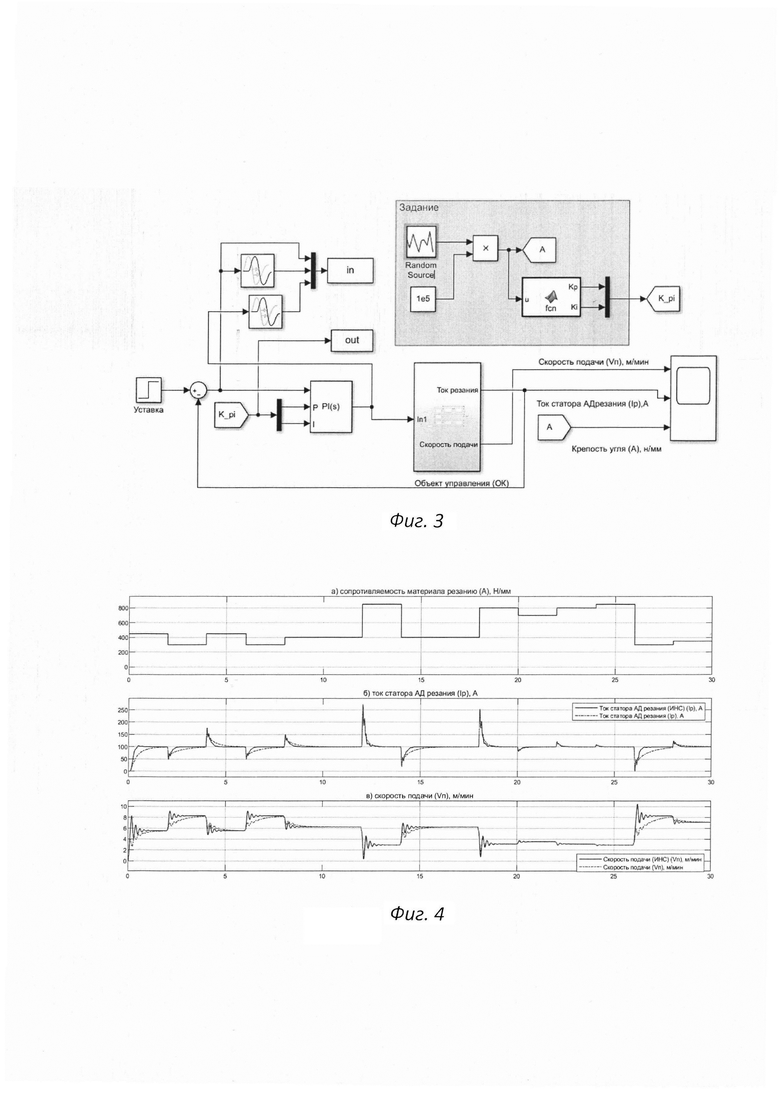
На начальном (подготовительном) этапе нейронную сеть обучают, ставя в соответствие конкретным дискретным значениям крепости угля значения коэффициентов KP и KI ПИ-регулятора, полученные по методу Циглера-Никольса (фиг. 3). Промежуточные коэффициенты регулятора вычисляют сплайн-интеполяцией, реализованной в блоке Matlab Function. Таким образом, выходы нейросетевого блока оказываются равными значениям параметров ПИ-регулятора, при подаче на входы нейронной сети параметров, соответствующих определенным состояниям объекта (крепостям угля).
Нейросетевой блок 2 работает следующим образом. На него поступают сигналы рассогласования (ошибки регулирования) с выхода сумматора 6 (первый вход), задержанный на Δt первым блоком временной задержки 3 сигнал с выхода сумматора 6 (второй вход) и сигнал с выхода ПИ-регулятора 1, задержанный на Δt вторым блоком задержки сигнала 4 (третий вход). Другими словами, поступают сигналы, входящие в уравнение работы ПИ-регулятора для k-го шага управления (момента времени tk), которое имеет вид:

где а1=(KP+KIΔt), a2=KP.
На выходах нейросетевого блока генерируют новые коэффициенты ПИ-регулятора 1. Первый выход нейросетевого блока, соединен с П-каналом регулятора 1 (фиг. 2), второй выход которого соединен с И-каналом регулятора. Вызов нейросетевого блока производиться раз в Δt.
Сигнал на выходе ПИ-регулятора (управляющий сигнал) в дискретной форме u(tk) описывается уравнением (1), и, как только вычислен u(tk), в нейросетевом блоке 2 происходит вычисление новых значений KP и KI для использования на следующем шаге.
Далее действия повторяются.
На фиг. 4 представлены результаты моделирования. Из графиков б) и в) на фиг. 4 видно, что при изменении крепости угля в пределах 150-450 Н/мм быстродействие обычного ПИ-регулятора составило при набросе нагрузки 0,97 с, при сбросе - 1,4 с; при изменении крепости угля в пределах 400-800 Н/мм быстродействие составило при набросе нагрузки 0,66 с, при сбросе - 1,25 с. При изменении крепости угля в пределах 150-450 Н/мм быстродействие ПИ-регулятора 1 с нейросетевым блоком 2 составило при набросе и сбросе нагрузки 0,37 с; при изменении крепости угля в пределах 400-800 Н/мм быстродействие составило при набросе и сбросе нагрузки 0,43 с.
При практической реализации предлагаемого устройства нейросетевой блок 2 может быть реализован как программно, так и аппаратно. Блоки временной задержки 3 и 4 могут быть выполнены в виде аналоговых линий задержки на микросхемах типа К593БР1. В качестве источника задающего сигнала 5 может быть использован регулируемый стабилизатор напряжения. Сумматор 6 представляет собой параллельный сумматор на операционном усилителе. В качестве датчика тока 8 может быть использован трансформатор тока. Фильтр нижних частот 9 можно выполнить по схеме фильтра нижних частот первого порядка на ОУ (А. Дж. Пейтон, В. Волш. Аналоговая электроника на операционных усилителях. - М.: БИНОМ, 1994, стр. 105, рис. 6.10). ПИ-регулятор 10 выполняется по стандартной схеме на операционном усилителе. Перемножители 11 и 12 выполнены на микросхемах типа К525ПС3. Сумматор 13 представляет собой обычный сумматор на операционном усилителе.
Таким образом, применение ПИ-регулятора с нейросетевым блоком позволит существенно повысить быстродействие регулятора нагрузки в среднем от 1,5 до 3 раз. Это обеспечит снижение динамических нагрузок в трансмиссии ОК при проработке твердых включений и возможных стопорениях исполнительного органа и тем самым повысит надежность ОК.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Устройство автоматического регулирования скорости подачи угледобывающего комбайна | 1986 |
|
SU1344899A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465716C1 |
| Нейросетевая система обнаружения и оперативной идентификации морских целей | 2018 |
|
RU2695985C1 |
| Система обнаружения гидроакустических сигналов и их нейросетевой классификации | 2018 |
|
RU2681252C1 |
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| Регулируемый электропривод угольного комбайна | 1986 |
|
SU1355706A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами | 2016 |
|
RU2644843C1 |
Изобретение относится к области управления горными машинами и может быть использовано для автоматического регулирования нагрузки угледобывающего комбайна. Технический результат - повышение быстродействия системы регулирования в условиях изменяющихся параметров объекта к управлению (крепости угля) с целью обеспечения заданного качества переходного процесса. Устройство автоматического регулирования нагрузки угледобывающего комбайна содержит источник задающего сигнала, сумматор и ПИ-регулятор, выход которого соединен с входом привода угледобывающего комбайна, в выходные цепи которого включен датчик тока резания, выход которого соединен с входом фильтра нижних частот. При этом в него дополнительно введены два блока временной задержки и нейросетевой блок, первый вход которого соединен с первым входом регулятора и выходом сумматора, причем первый вход и выход регулятора соответственно через первый и второй блоки временной задержки соединены соответственно со вторым и третьим входами нейросетевого блока, первый и второй выходы которого соединены соответственно со вторым и третьим входами регулятора, а выход источника задающего сигнала соединен с первым входом сумматора, второй вход которого подключен к выходу фильтра нижних частот, причем ПИ-регулятор содержит интегратор, первый и второй перемножители и сумматор. Причем первый вход регулятора соединен с входом интегратора и первым входом первого перемножителя, выход которого соединен с первым входом сумматора, а выход интегратора соединен с первым входом второго перемножителя, выход которого соединен со вторым входом сумматора, выход которого является выходом регулятора, второй и третий входы которого соединены соответственно со вторыми входами первого и второго перемножителей. 4 ил.
Устройство автоматического регулирования нагрузки угледобывающего комбайна, содержащее источник задающего сигнала, сумматор и ПИ-регулятор, выход которого соединен с входом привода угледобывающего комбайна, в выходные цепи которого включен датчик тока резания, выход которого соединен с входом фильтра нижних частот, отличающееся тем, что в него дополнительно введены два блока временной задержки и нейросетевой блок, первый вход которого соединен с первым входом регулятора и выходом сумматора, причем первый вход и выход регулятора соответственно через первый и второй блоки временной задержки соединены соответственно со вторым и третьим входами нейросетевого блока, первый и второй выходы которого соединены соответственно со вторым и третьим входами регулятора, а выход источника задающего сигнала соединен с первым входом сумматора, второй вход которого подключен к выходу фильтра нижних частот, причем ПИ-регулятор содержит интегратор, первый и второй перемножители и сумматор, причем первый вход регулятора соединен с входом интегратора и первым входом первого перемножителя, выход которого соединен с первым входом сумматора, а выход интегратора соединен с первым входом второго перемножителя, выход которого соединен со вторым входом сумматора, выход которого является выходом регулятора, второй и третий входы которого соединены соответственно со вторыми входами первого и второго перемножителей.
| Устройство автоматического регулирования скорости подачи угледобывающего комбайна | 1986 |
|
SU1344899A1 |
| SU 1777227 A2, 23.11.1992 | |||
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Способ приготовления катализаторов для синтеза аммиака | 1944 |
|
SU65317A1 |
| Прибор для измерения толщины льда | 1932 |
|
SU30443A1 |
| 0 |
|
SU169576A1 | |
| US 4741577 A1, 03.05.1988. | |||

