Изобретение относится к вычислительной технике и может быть использовано в судостроении.
Целью изобретения является расширение класса решаемзгх задач за счет определения силов1г1х и геометрических характеристик бyкcиpye a5lx систем подводного поиска.
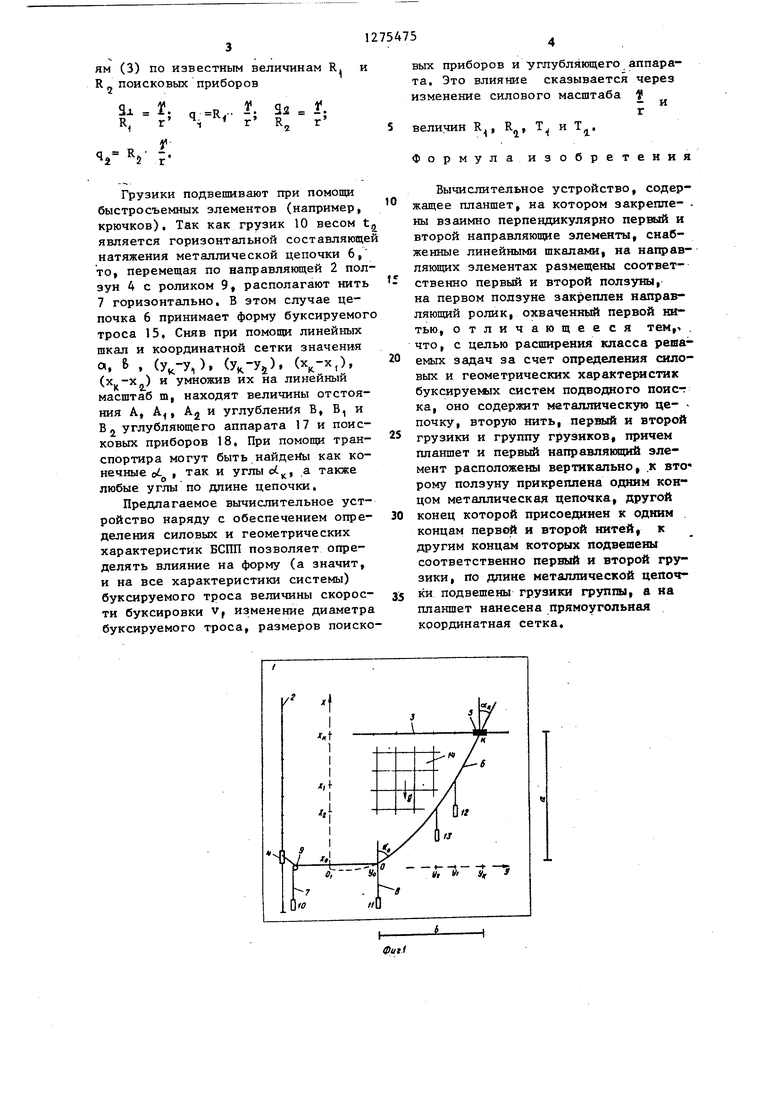
На фиг, 1 представлена схема вычислительного устройства; на фиг. 2 буксируемая схема подводного поиска (ВСШ)..
Устройство содержит планшет 1, расположенный вертикально, взаимно перпендикулярные направляющие элементы 2 и 3, пйлзуны 4 и 5, к ползуну 5 подвешена металлическая цепочка 6, другой конец которой присоединен к двум нитям 7 и 8, Нить 7 переброшена через направлякнций ролик 9 установленный на ползуне 4. На кон-: цах нитей 7 и 8 подвешены грузнки 10 и 11 весом tg и t. По длине цепочки подвешены грузики 12 и I3 группы. На планшете нанесена координатная сетка 14, а направляющие элементы снабжены ликейшми шкалами.
БСПП (4иг. 2) состоит из буксируемого троса (грузонесущего кабеля) 15, коренным концом К закрепленного на корме судна - буксировщика 16, на другом конце О буксируемого троса 15 расположен углубляющий аппарат 17, По длине буксируемого троса присоединены поискошде приборы 18.
При проектировании,и использоваНИИ БСПП определяют следующие основные характеристики: натяжение Т и Т на концах К и О буксируеь|ого троса; отстояние А и углубление В . конца О буксируемого троса с углубителем 17; отстояйие А йапример, ,-Зр и углубление В (например, ) поис ковых приборов; конечные углы А, и dL.
-д буксируемого троса.
Работа с предложенным вычислительным устройством происходит в следующей последовательности.
Прежде всего определяют линейный и силовой масштабы моделирования, рассматривая уравнения катенарной кривой и цепной линии с началом координат в точках 0,(, 1 и 2)
X 2-(Y 1 - Dj(1) tj , - V .V
X (у -- - 1),
(2)
где То .- натяжение вдоль буксируеШго троса, равное гидродинамической силе углубляющего аппарата 17;
г погонное гидродинамическое сопротивление буксируемого троса, обтекаемого потоком жидкости со скоростью V прдуглом 90°;
Хл У координаты буксируемого троса, принимающего при буксировке со скоростью v, форму катенарной кривой с началом координат в точке 0, (в этом случае массой буксируемого троса в воде пренебрегают);
t - горизонтальная составляющая натяжения металлической цепочки 6;
Y- погонная масса металлической цепочки 6j X и у - координаты металлической цепочки 6, принимающей в поле силы тяжести g форму цепной линии с началом координат в точке О,(фиг, 1),
Из выражений (1) и (2) следует, что форма буксируемого троса 15 подобна форме металлической цепочки 6, если выполняются условия
Те.
ta
(3)
или -о
1
Z Y
(4)
L
т
где t и L - длина цепочки буксируемого троса; m - линейный масштаб, В соответствии с выбранным линейным масштабом подбирают металлическую цепочку длиной т-Г L с любой погонной массой у. Затем согласно шлражениям (3) рассчитывают вес t
и 10 по заданным
t« грузиков 1I
и Т.. t и t
величинам 1 , Т , Т,
Y
.);
- (т„
Т,
г о
«arctg --2).
ctgot (ot
t,-t, 1
Величины g, и gj грузиков 12 и 13 находят также согласно выражениям (3) по известным величинам R. и R 2 поисковых приборов
2.
т
as
г
RIf.
Грузики подвешивают при помощи быстросъемных элементов (например, крючков). Так как грузик 10 весом t является горизонтальной составляюще натяжения металлической цепочки 6, то, перемещая по направляющей 2 ползун 4 с роликом 9, располагают нить
7горизонтально. В этом случае цепочка 6 принимает форму буксируемого троса 15, Сняв при помощи линейных щкап и координатной сетки значения а, & , (, ), (,j), (,),
(х -X ) и умножив их на линейный масштаб т, находят величины отстояния А, А, Aj и углубления В, В и
82 углубляющего аппарата 17 и поисковых приборов 18, При помощи транспортира могут быть найдены как конечные oi , так и углы ot, а также любые углы по дпине цепочки.
Предлагаемое вычислительное устройство наряду с обеспечением определения силовых и геометрических характеристик БСПП позволяет определять влияние на форму (а значит, и на все характеристики системы) буксируемого троса величины скорости буксировки Vj изменение диаметра буксируемого троса, размеров поисковых приборов и углубляющего аппарата. Это влияние сказывается через
изменение силового масштаба t
и
г
величин R., R , Т,
и Т
1
Формулаизобретения
Вычислительное устройство, содержащее планшет, на котором закрепле- . ны взаимно перпендикулярно первый и второй направляющие элементы, снабженные линейными шкалами, на направляющих элементах размещены соответственно первый и второй ползуны, на первом ползуне закреплен направляющий ролик, охваченный первой нитью, отличающееся тем,. что, с целью расширения класса решаемых задач за счет определения силовых и геометрических характеристик буксируемых систем подводного поисг ка, оно содержит металлическую це- почку, вторую нить, первый и второй грузики и группу грузиков, причем планшет и первый направляющий элемент расположены вертикально, .к вто рому ползуну прикреплена одним концом металлическая цепочка, другой конец которой присоединен к одним концам первой и второй нитей, к другим концам которых подвешены соответственно первый и второй грузики, по длине металлической цепочки подвешены грузики группы, а на планшет нанесена прямоугольная координатная сетка.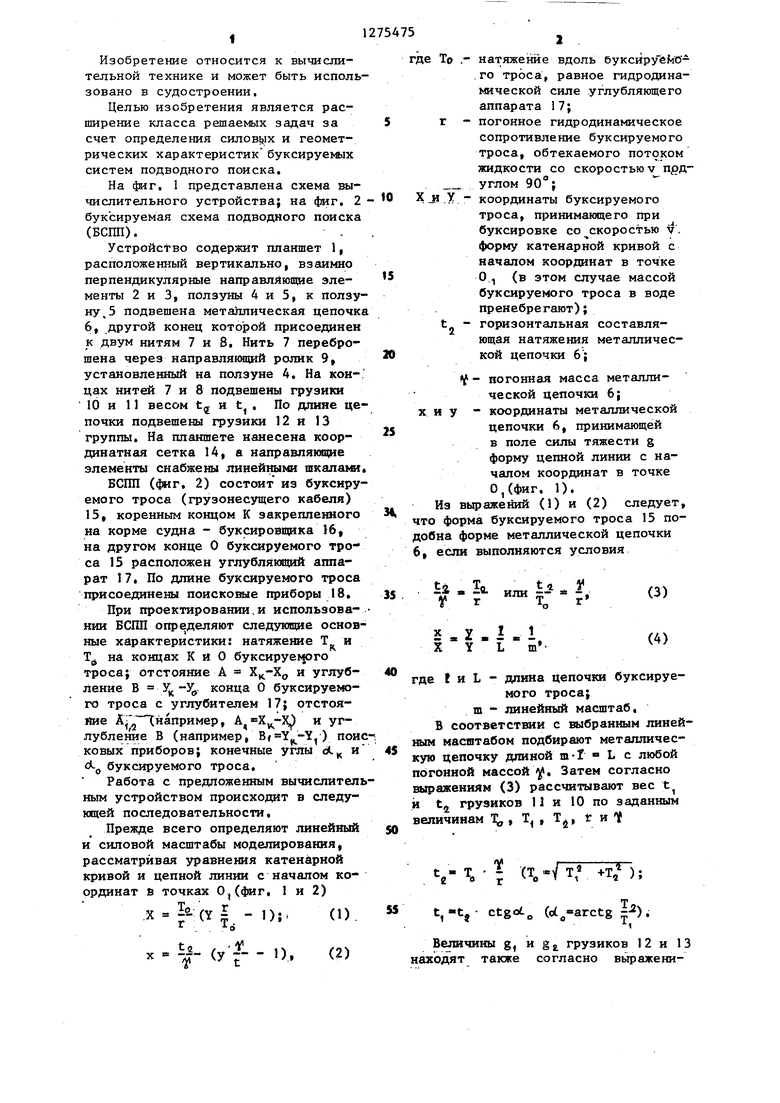
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования буксируемой системы | 1991 |
|
SU1833823A1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1986 |
|
SU1316014A1 |
| Чертежный прибор | 1984 |
|
SU1240635A1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1988 |
|
SU1614022A2 |
| Учебный прибор по механике | 1989 |
|
SU1716557A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Макет заякоренной системы | 1983 |
|
SU1106729A1 |
| Устройство для моделирования процесса буксировки в воздухе несущей поверхности | 1991 |
|
SU1810233A1 |
Изобретение относится к вычислительной технике. Цель изобретения - расширение класса решаемых задач за счет определения силовых и геометрических характеристик буксируемых систем подводного поиска. Устройство содержит вертикальный планшет, иа котором закреплены два взаимно перпендикулярных направляющих элемента, на каждом из которых размещен ползун. К однЬму из ползунов прикреплена одним концом металлическая цепочка, другой конец которой присоединен к двум нитям, на концах которых подвешены грузики, причем одна из нитей переброшена через направляющий ролик, закрепленный на другом ползуне. По длине металлической цепочки также подвешены грузики. В поле силы тяжести линии, образованной металлической цепочкой, совпадает с кривой, обрас S зуемой буксируе1« 1м тросом реальной (Л системл, поэтому вычислительное устройство позволяет определять основные характеристики буксируемых систем подводного поиска. 2 ил. го 1 сд 4 сл
| Вычислительный прибор | 1983 |
|
SU1105900A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вычислительный прибор | 1983 |
|
SU1095192A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
