11
Изобретение относится к электромеханике, в частности к электроприводам, и может быть использовано в системах и устройствах, где требуется стопорение ротора в заданном положении, например в позиционном приводе, в приводах робототехники и т.
Цель изобретения - уменьшение энергетических затрат в режиме сто- порения ротора.
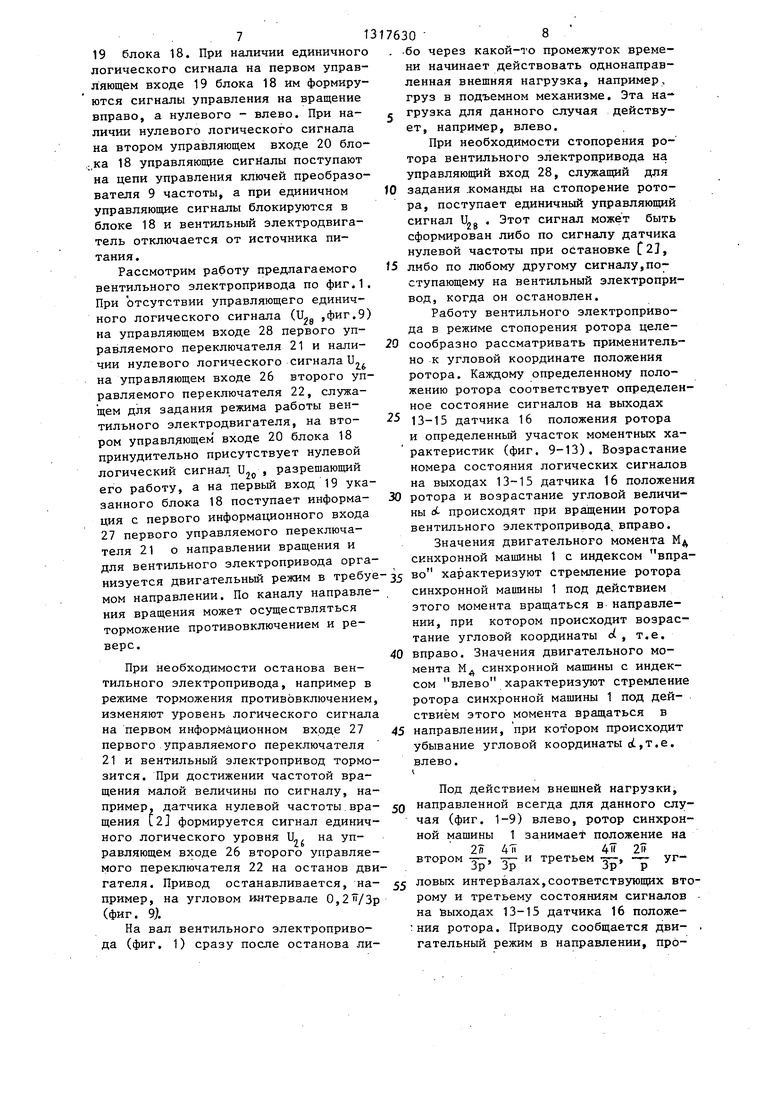
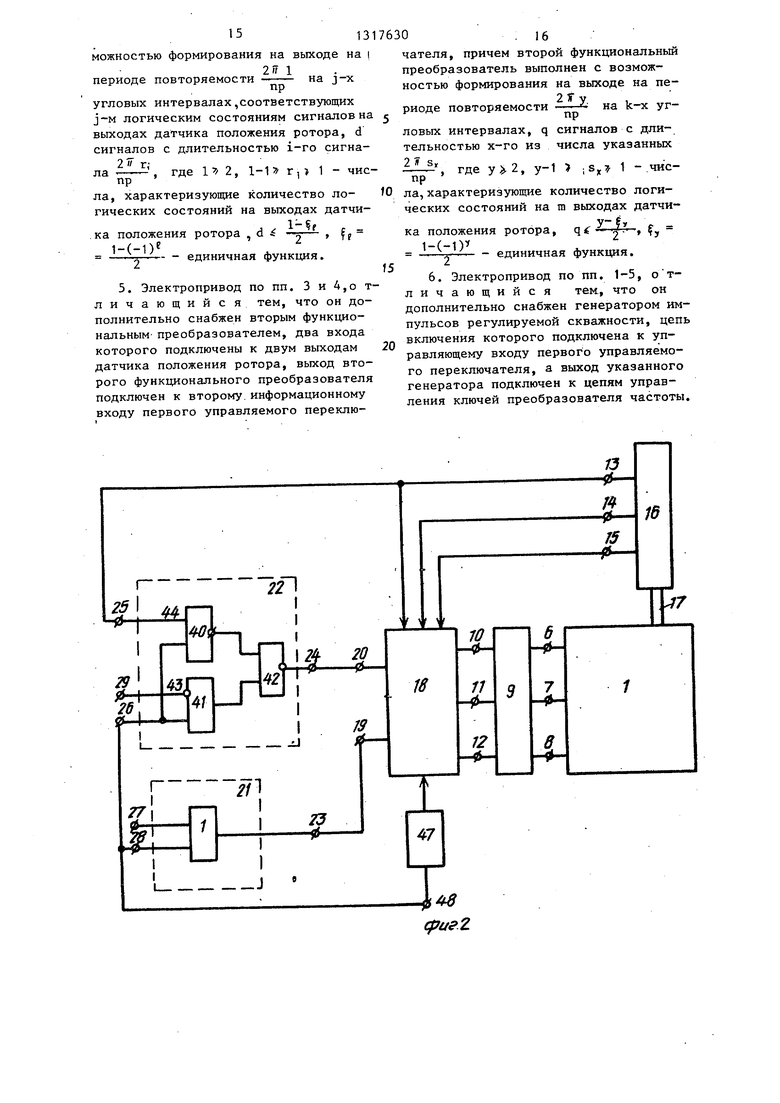
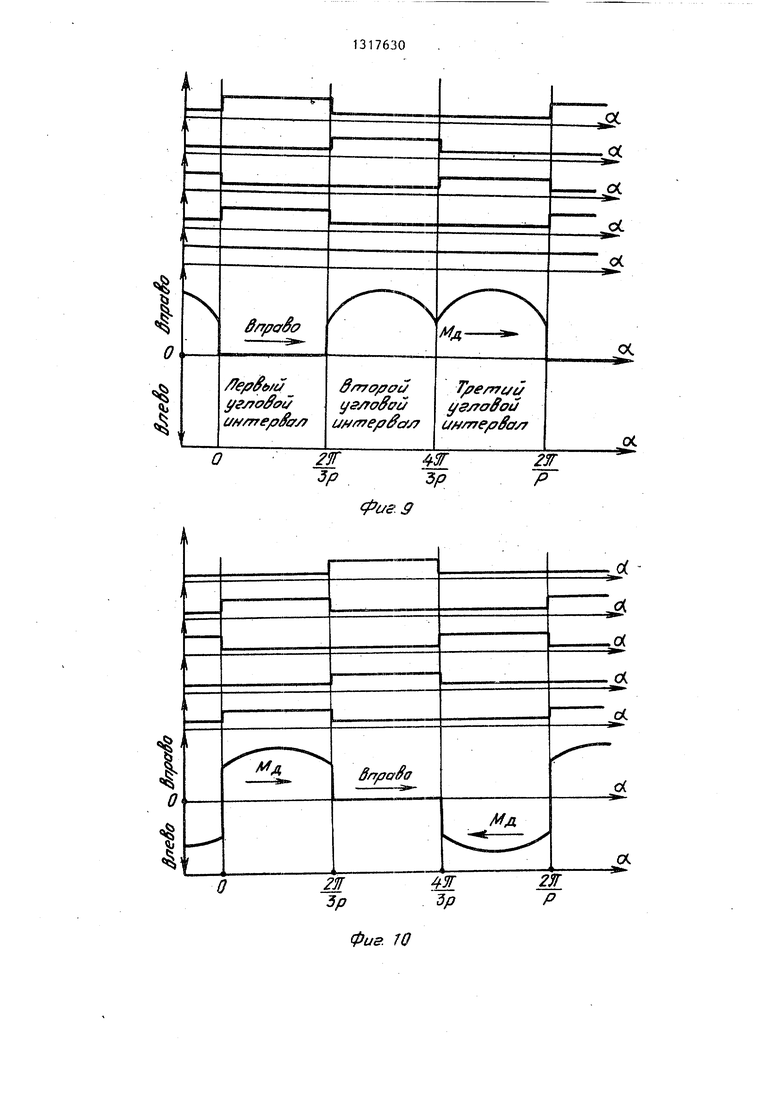
На фиг. 1 изображена блок-схема электропривода с двухвходовым вторым управляемым переключателем; на фиг. 2 - блок-схема электропривода с трехвходовым вторым управляемым переключателем} на фиг, 3 блок-схема электропривода с трехвходовыми первым и вторым управляемьп-ш переключателями; На фиг. 4 - блок-схема электропривода с первым функциональным преобразователем; на фиг.5 - блок-схема электропривода с двухвхо- довыми первым и вторым функциональными преобразователями; на фиг. 6 - блок-схема электропривода с трехвхо- довьм первым и двухвходовым вторым функциональными преобразователями; на фиг. 7 - схема управляемого переключателя, вариант исполнения; на фиг. 8 - схема функционального преобразователя, вариант исполнения; на фиг. 9 - эпюры напряжений управляющих логических сигналов в узлах блок-схем электропривода, изображенных на фиг. 1 и 2, а также их мо- ментные характеристики; на фиг. 10- 13 - эпюры напряжений управляющих логических сигналов в узлах блок- схем электроприводов, изображенных соответственно на фиг. 3-6, а также их моментные характеристики.
Вентильный электропривод (фиг.1) содержит синхронную машину 1 с числом пар полюсов р, секции 2-4 .якорной обмотки 5 которой подключены к выходам 6-8 преобразователя 9 частоты, цепи 10-12 управления ключей которого связаны с выходами 13-15 датчика в положения ротора, расположенного на валу 17 синхронной машины 1, через управляемый блок 18 формирования сигналов правого и левого направлений вращения с первым 19 и вторым 20 управляющим входами, причем датчик 16 положения ротора выполнен с возможностью формирования на выходах 13-15 трех логических сос27Г
тояний на угле -.
30 2
Электропривод снабжен первым 21 и вторым 22 управляемыми переключателями, выходы 23 и 24 которых подключены соответственно к первому 19
и второму 20 управляющим входам управляемого блока 18 формирования сигналов правогр и левого направлений вращения, первый информационный вход 25 второго управляемого переключателя 22 непосредственно связан с выходом 13 датчика 16 положения ротора, управляющий вход 26 второго управляемого переключателя 22 служит для подключения к задатчику режимов
работи вентильного электродвигателя, первый информационный 27 и управляющий 28 входы первого управляемого переключателя 21 предназначены для подключения к задатчикам направления вращения и режима стопорения ротора соответственно
Вентильный электропривод по фиг.2 отличается от электропривода, изображенного на фиг. 1, тем,что второй управляемый переключатель 22 снабжен вторым информационным входом 29,служащим для подключения задатчика ре- Ж1ИМОВ Пуск и Стоп, а управляющий вход 26 указанного переключателя 22 подключен к управляющему входу 28 первого управляемого переключателя 21.
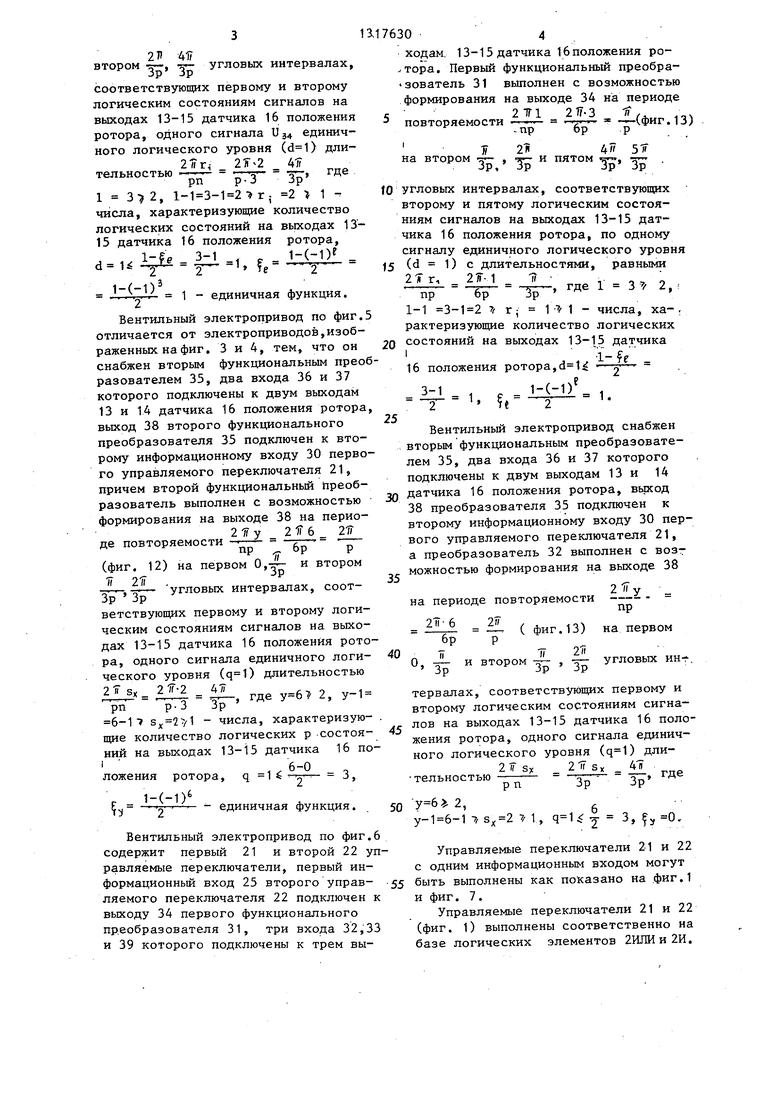
Вентильный электропривод по фиг.З отличается от злектроприводоз, йзображенных на фиг. 1 и 2, тем, что первый управляемый переключатель 21 дополнительно Снабжен вторым информационным входом 30, связанным непосредственно с выходом 14 датчика 16 положения ротора.
Вентильный электропривод по фиг.4 отличается от электроприводов, изображенных на фиг. 1-3, тем, что он дополнительно снабжен первым функциональным преобразователем 31, два входа 32 и 33 которого .подключены к двум выходам 13 и 14 датчика 16 положения ротора, выход 34 первого функциональ- ного преобразователя 31 подключен к первому информационному входу 25 второго управляемого переключателя 22, Причем первый функциональный переключатель 31 выполнен с возможностью формирования на своем выходе 34 на
периоде повторяемости
211«- i
: - (фиг. 11) на первом О,- и
РР
втором
27 417
угловых интервалах,
3
соответствующих первому и второму логическим состояниям сигналов на выходах 13-15 датчика 16 положения ротора, одного сигнала 1)34 единичного логического уровня () длиllli - , Н. рп р-3 Зр
1 , Г; 2 1 - числа, характеризующие количество логических состояний на выходах 13 15 датчика 16 положения ротора,
. 1-(-1)е 1-(-1)
тельностью
где
е
2 te 1 - единичная функция.
Вентильный электропривод по фиг. отличается от электроприводов,изображенных на фиг, 3 и 4, тем, что он снабжен вторым функциональным преоразователем 35, два входа 36 и 37 которого подключены к двум выходам 13 и 14 датчика 16 положения ротора выход 38 второго функционального преобразователя 35 подключен к второму информационному входу 30 первого управляемого переключателя 21, причем второй функциональный Преобразователь выполнен с возможностью формирования на выходе 38 на перио- 2Иу 2 li 6 21i- пр 6р р и втором
де повторяемости
(фиг. 12) на первом О, 2f .
-т--, угловых интервалах, соот- Зр Зр
ветствующих первому и второму логическим состояниям сигналов на выходах 13-15 датчика 16 положения ротора, одного сигнала единичного логического уровня () длительностью 2 « sx 211-2 47 рп р-3 Зр 6-17 - числа, характеризую- щие количество логических р состояний на выходах 13-15 датчика 16 по,-0-0
где 2, у-1
ложения ротора.
1
1-(-1) Ь 2
2 3. - единичная функция.
Вентильный электропривод по фиг.6 содержит первый 21 и второй 22 управляемые переключатели, первый информационный вход 25 второго управ- ляемого переключателя 22 подключен к выходу 34 первого функционального преобразователя 31, три входа 32,33 и 39 которого подключены к трем выП176304
ходам, 13-15 датчика 16 положения ро„тора. Первый функциональный преобразователь 31 выполнен с возможностью
формирования на выходе 34 на периоде
21Г1 2Я-3 -л
повторяемости
втором
2 3,
и пятом
4 5 Т
3
3
to
15
20
угловых интервалах, соответствующих второму и пятому логическим состояниям сигналов на выходах 13-15 датчика 16 положения ротора, по одному сигналу единичного логического уровня (d 1) с длительностями, равными 2Т г, 2f-i - . , -1 Ж где 1 3 / 2, : 1-1 -Tf г- 1 1 - числа, ха-. рактеризующие количество логических состояний на выходах 13-15 датчика
16 положения ротора,
1-fe
5
3-1 1
-T- ь
е
1-(-1)
1.
Вентильный электропривод снабжен вторым функциональным преобразователем 35, два входа 36 и 37 которого подключены к двум выходам 13 и 14 п датчика 16 положения ротора, вьлход 38 преобразователя 35 подключен к второму информационному входу 30 первого управляемого переключателя 21, а преобразователь 32 выполнен с возможностью формирования на выходе 38
5
0
2 liy
на периоде повторяемости
пр
2F , .,.. - с фиг. 13) на первом 6р Р
О,
Зр
и втором
Зр
2ii
, -ij- угловых ИН-Г ,
тервалах, соответствующих первому и второму логическим состояниям сигналов на выходах 13-15 датчика 16 положения ротора, одного сигнала единичного логического уровня () дли- 2 7 ЗУ Зж 4 р п Зр Зр
. 2,
тельностью
где
7, 3,2 7/ 1 , 3, f
0.
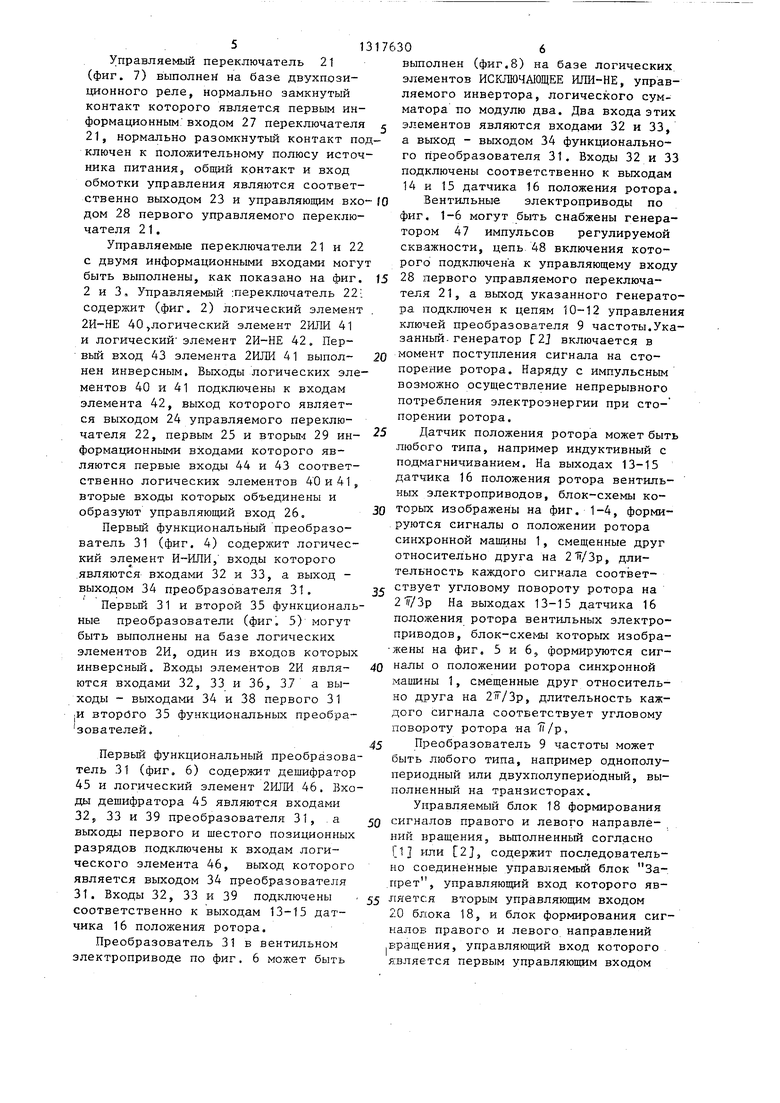
Управляемые переключатели 21 и 22 с одним информационным входом могут быть выполнены как показано на фиг.1 и фиг. 7.
Управляемые переключатели 21 и 22 (фиг. 1) выполнены соответственно на базе логических элементов 2ИЛИи2И.
Управляемый переключатель 21 (фиг, 7) выполнен на базе двухпози- ционного реле, нормально замкнутый контакт которого является первым информационным входом 27 переключателя 21, нормально разомкнутый контакт поключен к положительному полюсу источника питания, общий контакт и вход обмотки управления являются соответственно выходом 23 и управляющим вхо дом 28 первого управляемого переключателя 2 1.
Управляемые переключатели 21 и 22 с двумя информационными входами могу быть выполнены, как показано на фиг, 2 и 3, Управляемый :переключатель 22: содержит (фиг, 2) логический элемент 2Й-НЕ 40 логический элемент 2ИЛИ 41 и логический элемент 2И-НЕ 42. Первый вход 43 элемента 2ИЛИ 41 выполнен инверсным. Выходы логических элементов 40 и 41 подключенЕ) к входам элемента 42, выход которого является выходом 24 управляемого переключателя 22, первым 25 и вторьп- 29 ин- формационными входами которого являются первые входы 44 и 43 соответственно логических элементов 4 0и415, вторые входы которых объединены и образуют управляющий вход 26,
Первый функциональный преобразователь 31 (фиг, 4) содержит логический элемент , входы которого .являются входами 32 и 33, а выход - выходом 34 преобразователя 31,
Первый 31 и второй 35 функциональные преобразователи (фиг, 5) могут быть выполнены на базе логических элементов 2И, один из входов которых инверсный. Входы элементов 2И являются входами 32, 33 и 36, 37 а выходы - выходами 34 и 38 первого 31 и вторбго 35 функциональных преобра- зователей.
Первый функциональный преобразователь 31 (фиг, 6) содержит дешифратор 45 и логический элемент 2ИЛИ 46. Входы дешифратора 45 являются входами 32, 33 и 39 преобразователя 31, а выходы первого и шестого позиционных разрядов подключены к входам логического элемента 46, выход которого является выходом 34 преобразователя 31, Входы 32, 33 и 39 подключены соответственно к выходам 13-15 датчика 16 положения ротора.
Преобразователь 31 в вентильном электроприводе по фиг. 6 может быть
г(О 176306
выполнен (фиг.8) на базе логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ, управляемого инвертора, логического сумматора по модулю два. Два входа этих элементов являются входами 32 и 33, а выход - выходом 34 функционального преобразователя 31, Входы 32 и 33 подключены соответственно к выходам 14 и 15 датчика 16 положения ротора,
Вентильные электроприводы по фиг, 1-6 могут быть снабжены генератором 47 импульсов регулируемой
скважности, цепь 48 включения кото
рого подключена к управляющему входу
28 первого управляемого переключателя 21, а выход указанного генератора подключен к цепям 10-12 управления ключей преобразователя 9 частоты,Указанный, генератор r2J включается в момент поступления сигнала на сто- порение ротора. Наряду с импульсным возможно осуществление непрерывного потребления электроэнергии при сто- порении ротора.
Датчик положения ротора может быть любого типа, например индуктивный с подмагничиванием. На выходах 13-15 датчика 16 положения ротора вентильных электроприводов, блок-схемы которых изображены на фиг, 1-4, формируются сигналы о положении ротора синхронной машины 1, смещенные друг относительно друга на 2 П /Зр, длительность каждого сигнала соответствует угловому повороту ротора на 2Т/Зр На выходах 13-15 датчика 16 положения ротора вентильных электроприводов, блок-схемы которых изобра- жены на фиг, 5 и 6, формируются сигналы о положении ротора синхронной маошны 1, смещенные друг относительно друга на 2|Г/Зр, длительность каждого сигнала соответствует угловому повороту ротора -на TF/p,
Преобразователь 9 частоты может быть любого типа, например однополу- периодный или двухполупериодный, выполненный на транзисторах.
Управляемый блок 18 формирования
сигналов правого и левого направлений вращения, выполненный согласно 1 рши С2, содержит последовательно соединенные управляемьш блок Запрет, управляющий вход которого является вторым управляющим входом
20 блока 18, и блок формирования сигналов правого и левого направлений вращения, управляющий вход которого , является первым управляющим входом
.713
19 блока 18. При наличии единичного огического сигнала на первом управяющем входе 19 блока 18 им формируются сигналы управления на вращение вправо, а нулевого - влево. При наличии нулевого логического сигнала на втором управляющем входе 20 бло- ка 18 управляющие сигналы поступают на цепи управления ключей преобразователя 9 частоты, а при единичном управляющие сигналы блокируются в блоке 18 и вентильный электродвигатель отключается от источника питания.
Рассмотрим работу предлагаемого вентильного электропривода по фиг.1. При отсутствии управляющего единичного логического сигнала ( ,фиг.9) на управляющем входе 28 первого управляемого переключателя 21 и наличии нулевого логического сигнала и
на управляющем входе 26 второго управляемого переключателя 22, служащем для задания режима работы вентильного электродвигателя, на втором управляющем входе 20 блока 18 принудительно присутствует нулевой логический сигнал , разрешающий его работу, а на первый вход 19 указанного блока 18 поступает информация с первого информационного входа 27 первого управляемого переключателя 21 о направлении вращения и для BeHTifflbHoro электропривода организуется двигательный режим в требуемом направлении. По каналу направления вращения может осуществляться торможение противовключением и реверс.
При необходимости останова вентильного электропривода, например в режиме торможения противовключением, изменяют уровень логического сигнала на первом информационном входе 27 первого управляемого переключателя 21 и вентильный электропривод тормозится. При достижении частотой вращения малой величины по сигналу, например, датчика нулевой частоты вращения С2 формируется сигнал единичного логического уровня U. на управляющем входе 26 второго управляемого переключателя 22 на останов двигателя. Привод останавливается, например, на угловом интервале 0,2 /Зр (фиг. 9).
На вал вентильного электропривода (фиг. 1) сразу после останова ли
0 8
бо через какой-то промежуток времени начинает действовать однонаправленная внещняя нагрузка, например, груз в подъемном механизме. Эта нагрузка для данного случая действует, например, влево.
При необходимости стопорения ротора вентильного электропривода на управляющий вход 28, служащий для
задания .команды на стопорение ротора, поступает единичный управляющий сигнал U2g . Этот сигнал может быть сформирован либо по сигналу датчика нулевой частоты при остановке C2J,
либо по любому другому сигналу,поступающему на вентильный электропривод, когда он остановлен.
Работу вентильного электропривода в режиме стопорения ротора целесообразно рассматривать применительно к угловой координате положения ротора. Каждому определенному положению ротора соответствует определенное состояние сигналов на выходах
13-15 датчика 16 положения ротора и определенный участок моментных характеристик (фиг. 9-13). Возрастание номера состояния логических сигналов на выходах 13-15 датчика 16 положения
ротора и возрастание угловой величины ci. происходят при вращении ротора вентильного электропривода, вправо.
Значения двигательного момента Мд синхронной машины 1 с индексом впра- во характеризуют стремление ротора синхронной машины 1 под действием этого момента вращаться в направлении, при котором происходит возрастание угловой координаты ct , т.е.
вправо. Значения двигательного момента Мд синхронной машины с индексом влево характеризуют стремление ротора синхронной машины 1 под действием этого момента вращаться в
направлении, при кот ором происходит убывание угловой координаты ci,T.e. влево.
Под действием внешней нагрузки, направленной всегда для данного случая (фиг. 1-9) влево, ротор синхронной машины 1 занимает положение на
2 4Т 4 й 2№ втором 2, - и третьем , - угловых интервалах,соответствующих второму и третьему состояниям сигналов - на Выходах 13-15 датчика 16 положе- ния ротора. Приводу сообщается дви- . гательный режим в направлении, противоположном внешнему воздействию, т.е. вправо, что и обеспечивает сто- по рение вала синхронной машины 1 в заданном положении. Это обусловлено тем, что на указанных угловых интервалах на первом управляющем входе 19 блока 18 присутствует единичный сигнал и, , при котором блок 18 формирует сигналы на вращение вправо, а на втором управляющем входе 20 - нулевой управляющий сигнал и , разрешающий прохождение управляющих сигналов на цепи 10-12 управления ключей преобразователя 9 частоты.
to
режиме отключения. Если при этом одновременно изменить уровень управляю щего сигнала на первом информационном входе 27, служащем для задания направления вращения, первого управляемого переключателя 21, то вентильный электропривод тормозится в режиме динамического торможения в том случае, если второй управляющий вход 20 блока 18 связан с цепями управления одной из групп ключей преобразователя 9 частоты. Возможно тор можение электродвигателя в режиме противовключения последующим поступПри исчезновении внешней нагрузки,15 лением сигнала Стоп с выхода датнапример при снятии груза с крюка подъемного механизма, вентильный электропривод, вращаясь вправо, останавливается на выбеге на первом
2Ti „
О,
Зр
угловом интервале и отключает
ся от источника питания. Это обусловлено тем, что на второй управляющий вход 20 блока 18 с первого выхода 13 датчика 16 поступает единичный управляющий сигнал, запрещающий прохождение управляюш гх сигналов на цепи 10-12 управления ключей преобраВ случае, если внешняя изменяюща ся нагрузка изменяет направление св его действия, стопорение ротора осу ществляет вентильный электропривод
зователя 9 частоты.
Процесс потребления электрознергииЗО изображенный на фиг. 3. Диаграммы в режиме стопорения ротора происходит напряжений и моментов представлены как в непрерывном, так и импульсном режиме, задаваемом генератором 47 импульсов регулируемой скважности, как для данного случая (фиг. 1), так и для последующих (фиг. 2-6).
При повторном появлении внешней
на фиг. 10. При наличии единичного управляющего сигнала на управляющих входах 26 и 28 переключателей 21 и 5 22 через первьй переключатель 21 си нал с второго выхода 14 датчика 16 поступает на первый управляющий вхо
19блока 18, а через переключатель 22 сигнал с первого выхода 13 датчи
нагрузки на валу вентильного электропривода (фиг. 1) процессы происходят аналогично описанным.
В случае, если ротор вентильного электропривода занимает положение после останова, отличное от описанного, и если внешняя нагрузка начинает действовать не сразу после останова, то возможно вращение ротора вентильного электродвигателя в реяси- ме стопорения ротора вправо.
19блока 18, а через переключатель 22 сигнал с первого выхода 13 датчи40 ка 16 - на второй управляюш 1й вход
20указанного блока 18.
Под действием внешней нагрузки, направленной, например, влево, ро- 45 тор синхронной машины 1 занимает поА 21
ложение на первом 0 - угловом интервале. Приводу сообщается двигательный режим в направлении, проти- 0т этого недостатка свободен вен- 50 зоположном внешнему воздействию,т.е. тильный электропривод, изображенный- вправо. Двигательный момент компен- на фиг. 2. Для остановки вращающего- сирует момент внешней нагрузки, что ся двигателя достаточно изменить уро- и обеспечивает стопорение ротора.Это вень управляющего сигнала на втором происходит потому, что на указанных
55 угловых интервалах на первом управинформационном входе 29, служащем для задания режимов Пуск и Стоп второго управляемого переключателя 22 с нулевого на единичный. Вентильный электропривод останавливается в
ляющем входе 19 блока 18 присутствует единичный управляющий сигнал U, , при котором блок 18 формирует сигналы на вращение вправо, а на втором
режиме отключения. Если при этом одновременно изменить уровень управляющего сигнала на первом информационном входе 27, служащем для задания направления вращения, первого управляемого переключателя 21, то вентильный электропривод тормозится в режиме динамического торможения в том случае, если второй управляющий вход 20 блока 18 связан с цепями управления одной из групп ключей преобразователя 9 частоты. Возможно торможение электродвигателя в режиме противовключения последующим поступ
чика нулевой частоты вращения, как описано в 2. Вентильные электроприводы по фиг. 2-6 могут останавливаться любым из указанных способов.
Вентильный электропривод по фиг.2 в режиме стопорения ротора работает так же, как и вентильный электропривод, изображенный на фиг. 1. Работа пояснена эпюрами, приведенными на фиг. 9.
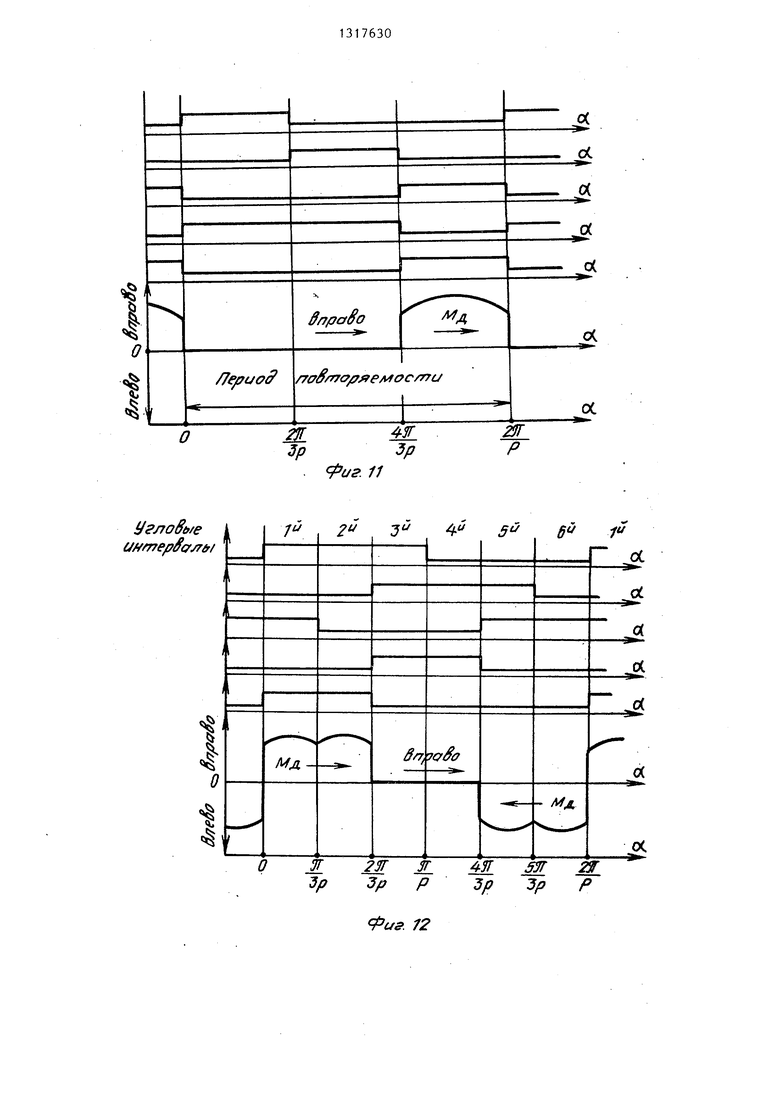
В случае, если внешняя изменяющаяся нагрузка изменяет направление своего действия, стопорение ротора осуществляет вентильный электропривод,
изображенный на фиг. 3. Диаграммы напряжений и моментов представлены
на фиг. 10. При наличии единичного управляющего сигнала на управляющих входах 26 и 28 переключателей 21 и 22 через первьй переключатель 21 сигнал с второго выхода 14 датчика 16 поступает на первый управляющий вход
19блока 18, а через переключатель 22 сигнал с первого выхода 13 датчика 16 - на второй управляюш 1й вход
20указанного блока 18.
Под действием внешней нагрузки, направленной, например, влево, ро- тор синхронной машины 1 занимает поА 21
ложение на первом 0 - угловом инляющем входе 19 блока 18 присутствует единичный управляющий сигнал U, , при котором блок 18 формирует сигналы на вращение вправо, а на втором
11управляющем входе 20 - нулевой управляющий сигнал , разрешающий прохождение управляющих сигналов на цепи 10-12 управления ключей преобразователя 9 частоты.
При исчезновении внешней нагрузк вентильный электропривод,вращаясь вправо, останавливается на выбеге
2J 4 на втором - , V- угловом интервал
и отключается от источника питания. Это обеспечивается тем, что на второй управляющий вход 20 блока 18 с первого выхода 13 датчика 16 поступает единичный управляющий сигнал
и
л
запрещающий прохождение управляющих сигналов на цепи 10-12 управления ключей преобразователя 9 частоты ,
При действии внешней нагруЗки вправо процессы электропривода проходят аналогично с тем отличием, что
4 2
на третьем , - угловом интервале -зр р
электроприводу сообщается двигательный момент влево, так как на первом управляющем входе 19 блока 18 имеет место сигнал нулевого логического уровня.
Вентильньй электропривод по фиг.4 содержашда первый функциональный преобразователь 31,- работает (фиг. 11) аналогично вентильным приводам по фиг. 1 и 2, с тем отличием, что зона отключенного состояния занимает пер2 2 ii 4ir
вый О, -:г второй - , v5 угловые Зр Зр Зр
интервалы. В том случае, если преобразователь 9 частоты вьтолнен двух- полупериодным и второй управляющий вход 20 блока 18 связан с цепями управления одной из групп ключей преобразователя 9 или второй управляющий вход 20 блока 18 при использований однополупериодного преобразователя 9 частоты связан с включенным ,в цепь источника питания дополнительным ключом,с помощью которого осуществляется отключение электродвигателя от указанного источника питания, то обеспечение на первом и втором угловых интервалах нулевого управляющего сигнала U, на первом управляющем входе 19 блока 18 приводит к организации динамического торможения на указанных угловых интервалах при исчезновении внешней нагрузки, когда-ротор электропривода, выйдя
O
5
5
0
0
5
0
5
0
из третьего
углового интер12
4 2 Зр р
вала, вращается вправо при отключенном источнике питания. Организа- ция динамического торможения в данном случае значительно сокращает время переходного процесса при остановке ротора вентильного электропривода.
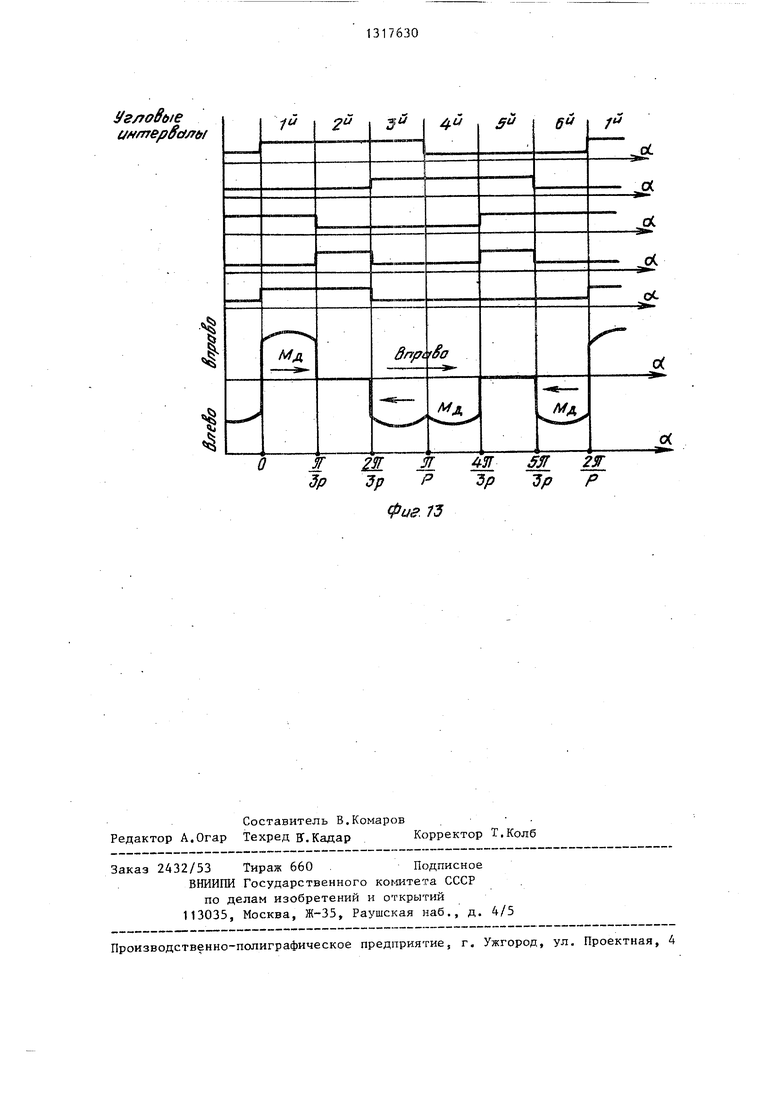
Работа вентильного электропривода по фиг. 5 принципиально не отличается от работы электропривода, изображенного на фиг. 3. Отличие заключается лишь в том, что зоны отключения вращения вправо и влево организуются каждая на двух угловых интервалах (фиг. 12), соответствующих двум состояниям логических сигналов на выходах 13-15 датчика 16 положения ротора.
Для ряда применений, например для вращения рабочего органа однолопаст- ного насоса, на ротор вентильного электропривода в режиме стопорения могут действовать различные по направлению внешние нагрузки. Т.е. если рабочий орган указанного .насоса застопорен во время совершения холостого хода, то электропривод должен обеспечить двигательный момент, например, влево, если под действием силы тяжести рабочий орган заставляет ротор электропривода вращаться вправо, а если рабочий орган застопорен во время совершения рабочего хода, то в зависимости от соотношения веса рабочего органа, которьй для данного положения ротора электропривода создает внешний момент, действующий вправо, и нагрузки, создаваемой перекачиваемой технологической жесткостью, которая всегда действует вправо, суммарное внешнее воздействие на ротор электропривода может быть различно по направлению.
На ротор электропривода по фиг.6
на первом, втором и третьем (О, )
угловых интервалах (фиг. 13) деист- вует знакопеременная периодическая внешняя нагрузка, а на четвертом.
пятом и шестом (- ,
гт
) угловых ин
тервалах - нагрузка только вправо.
Механическая характеристика (фиг. 13) вентильного электропривода по фиг. 6 обеспечивает стопорение ротора электродвигателя при таком харак- тепе нагрузки.
1313
Таким образом по сравнению с прототипом каждый раз в режиме .стопо- рения при отклонении положения ротора предлагаемого электроприво да от заданного под действием внешней на- грузки дли вентильного электропривода организуется двигательный режим в. направлении, противоположном внешнему воздействию. При отсутствии внешней нагрузки вентильный электропри- вод отключается от источника питания Такой режим работы вентильного электропривода при периодической внешней нагрузке в режиме стопорения ротора, при котором обеспечивается надежное стопорение вала вентильного электропривода и кроме того, потребление электроэнергии вентильным электроприводом происходит с периодичностью внешней нагрузки, весьма благопри- ятен при работе от систем электроснабжения автономных объектов.
Эффект, связанный с повышением энергетических показателей, опреде
ляется в каждом конкретном случае
использования изобретения по доле времени, когда нагрузка на валу вентильного электропривода отсутствует, от общего контрольного времени, на котором определяется эффективность,
Использование изобретения позволяет исключить из вентильных электроприводов фрикционные муфты торможения и стопорения, обладающие низким ресурсом и увеличиваюгдае габа- риты вентильного электропривода, В частности, для вентильных электроприводов, у которых доля режима стопорения ротора от общего времени работы мала, обеспечение расторможенно- го состояния муфт требует значительных затрат электроэнергии, которые 1-щут на удержание электромагнитом якоря муфты в положении, не препятствующем вращению ротора электродви- гателя. Использование изобретения позволяет исключить указанные потери электроэнергии при незначительных энергетических затратах на обеспечение режима стопорения ротора.
Формула- изобретения
1. Вентильный электропривод, содержащий синхронную машину с числом пар полюсов р, секции якорной обмотки которой подключены к выходу преобразователя частоты, цепи управления ключей которого связаны с выхода
5 0
5
0
5 0 5 0
5
ми датчика положения ротора через уп- равляем1 1й блок формирования сигналов правого и левого направлений вращения с первым и вторым управляющими входами, причем датчик положения ротора выполнен с возможностью формирования на m выходах п логических состояний сигналов на угле , о т - л и ч а ю щ и и с я тем, что, с целью уменьшения энергетических затрат в режиме стопорения ротора, он дополнительно снабжен первым и вторым управляемыми переключателями, выходы которых подключены соответственно к первому и второму управляющим входам управляемого блока формирования сигналов правого и левого направлений вращения, первый информационный, вход второго управляемого переключателя связан по крайней мере с одним из выходов датчика положения ротора, управляющий вход второго управляемого переключателя предназна- чен для подключения к задатчику режимов работы вентильного электропривода, первый информационный и управляющий входы первого управляемого переключателя предназначены для подключения к задатчику направления вращения и задатчику режима стопорения ротора соответственно.
2.Электропривод по п.1, отличающийся тем, что второй управляемый переключатель дополнительно снабжен вторым информационным входом, предназначенным для подключения к задатчику режимов Пуск и Сигнал
а управляющий вх од указанного переключателя подключен к управляющему входу первого управляемого переключателя ,
3.Электропривод по пп, 1 и 2, отличающийся тем, что первый управляемый переключатель выполнен с вторым информационным входом, связанным ПО к.райней мере с одним из выходов датчика положения ротора.
4.Электропривод по пп. 1-3, о т- личающийся тем, что он дополнительно снабжен первым функциональным преобразователем, два входа которого подключены к двум выходам датчика положения ротора, выход первого функционального преобразователя подключен к первому информационному входу второго управляемого переключателя, причем первый функциональный переключатель выполнен с воз
периоде повторяемости
1317630 можностью формирования на выходе на i
2it I.
на j-x
fipкостью формирования на выходе на пе2Тл
риоде повторяемости --
пр
ловых интервалах, q сигналов с длительностью х-го из числа указанных
Ш S,
угловых интервалах,соответствующих J-M логическим состояниям сигналов на выходах датчика положения ротора, d сигналов с длительностью i-ro сигнаZi/ Г ла - . где 1/ 2, 1-й г, 1 - чис.16
чателя, причем второй функциональный преобразователь выполнен с возможна k-x угпр
ла, характеризующие количество логических состояний на выходах датчи10
пр
где у 2, у-1
.8,7
1 - числа, характеризующие количество логических состояний на m выходах датчика положения ротора, q X, ,. . р
. ка положения ротора d .
1-(-1)g л - - единичная функция.
5. Электропривод по пп. 3 и 4,о т- личающийся тем, что он дополнительно снабжен вторым функциональным преобразователем, два входа которого подключены к двум выходам датчика положения ротора, выход второго функционального преобразователя подключен к второму, информационному входу первого управляемого переклю0
.16
чателя, причем второй функциональный преобразователь выполнен с возможна k-x угШ S,
10
f5
- 20 пр
где у 2, у-1
.8,7
1 - числа, характеризующие количество логических состояний на m выходах датчика положения ротора, q X, ,. . р
1-(-1)
-„,- единичная функция,
6. Электропривод по пп. 1-5, о т- личающийся тем, что он дополнительно снабжен генератором импульсов регулируемой скважности, цепь включения которого подключена к управляющему входу первого управляемого переключателя, а выход указанного генератора подключен к цепям управления ключей преобразователя частоты.
фа&.7
сригб
I 5/1
32
33
фиев
fpue. 3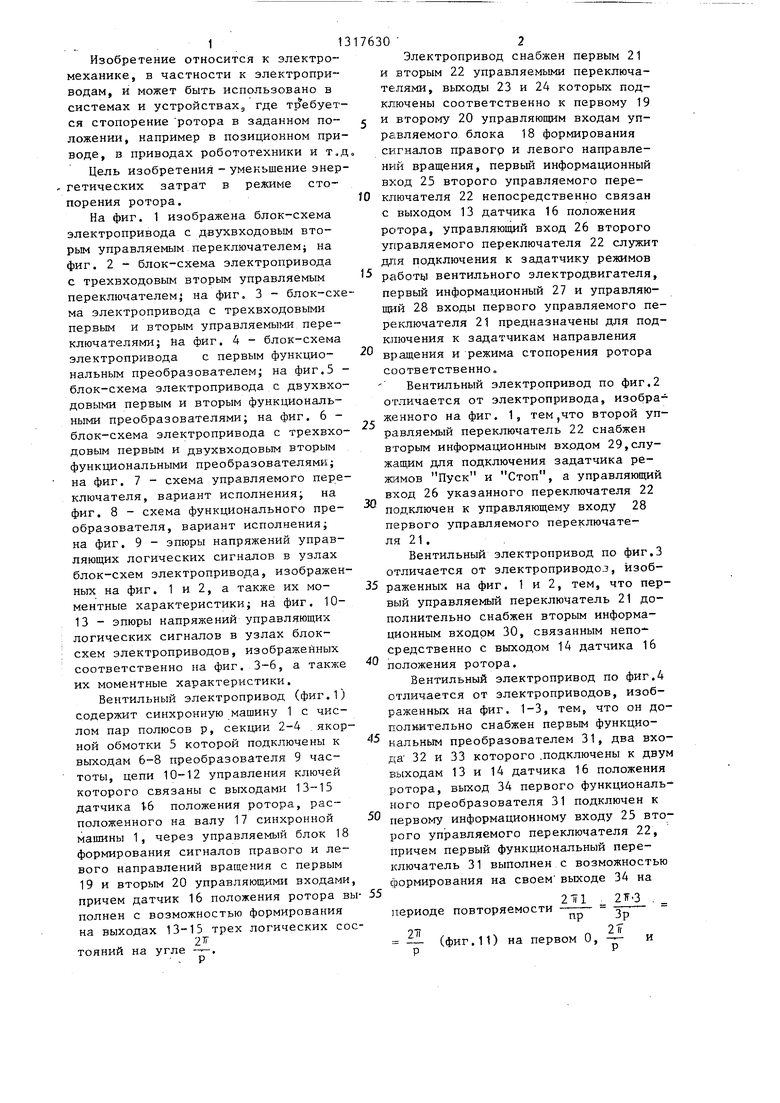
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным электродвигателем в режиме стопорения ротора | 1985 |
|
SU1300616A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Вентильный электродвигатель | 1989 |
|
SU1677839A2 |
| Вентильный электродвигатель | 1985 |
|
SU1309241A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Вентильный электродвигатель | 1988 |
|
SU1571728A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1135002A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |


Изобретение относится к электротехнике, в частности к электроприводам, и может быть использовано в системах и устр-вах, где требуется стопорение ротора. Целью изобретения является уменьшение .энергетических затрат в режиме стопорения ротора. Вентильный электродвигатель содержит синхронную машину 1, датчик 16 положения ротора и преобразователь частоты. При отсутствии внешней нагрузки на валу электродвигателя в режиме стопорения ротора сигналами с выхода датчика 16 положения ротора, поступающими на первый и второй управляющие входы блока 18 формирования сигналов правого и левого направления вращений, выход которого подключен к цепям управления ключами преобразователя частоты соответственно через первый 21 и второй 22 управляемые переключатели, ротор электродвигателя устанавливается в требуемое положение , а электродвигатель отключается от источника питания. При появлении внешней нагрузки сигналами с датчика 16 положения ротора электродвигатель переводится в двигательный режим в направлении, противоположном внешнему воздействию. При отсутствии внешней нагрузки электродвигатель отключается от источника питания. Потребление электроэнергии электродвигателем производится с периодичностью внешней нагрузки. Это обеспечивает повьш1ение энергетических показателей электродвигателя в режиме стопорения в заданном положении. 5 з.п. ф-лы, 13 ил, i С 00 05 Од о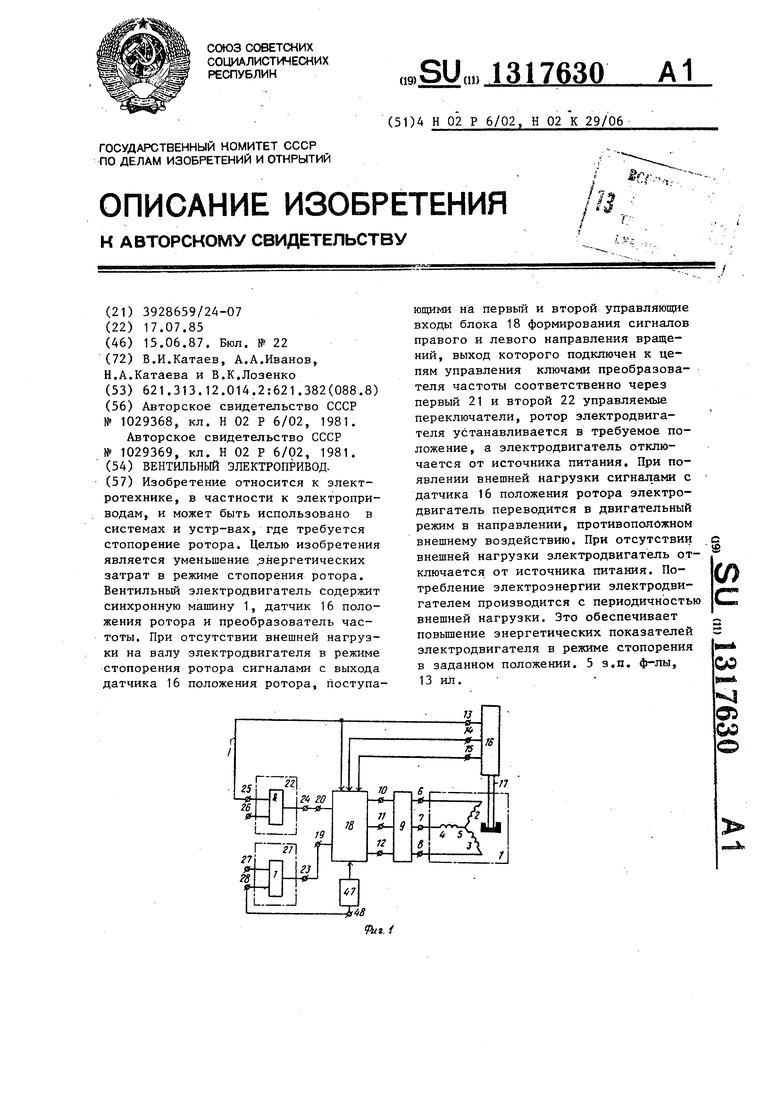
«C
вгт/за о
0(
I
a
0
11
3p
4Ж.
J/7
2ff P
фиа 70
Угло8о/е
О
Ǥ
us. 72
У г/7 О 8 61 е Uffmep cfjTtfi
4
Составитель В.Комаров
Редактор А.Огар Техред ВТ.Кадар Корректор
Заказ 2432/53 Тираж 660 . Подписное ВНИИПИ Государственного коьштета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Puff. 7J
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
