1
счет увеличения зоны обслуживания. На основании 1 жестко установлен сепаратор 2 с размещенными в нем шариками 3. Колонна 4 выполнена полой, а колонна 7 установлена внутри колонны 4 и между ними размещен сепаратор 2. Кинематическая связь между колоннами 4 и 7 осуществляется посредством тел качения 3 сепаратора 2. На поворотных колоннах 4 и 7 установлены механические руки 15 и 16. Для обеспечения автоматической выборки радиального зазора при износе контактирующих поверхностей кинематичес1
Изобретение относится к машино-. строению и может быть использовано для механизации и автоматизации основных и вспомогательных операций технологических процессов.
Целью изобретения является повышение точности позиционирования и расширение технологических возможностей за счет увеличения зоны обслуживания .
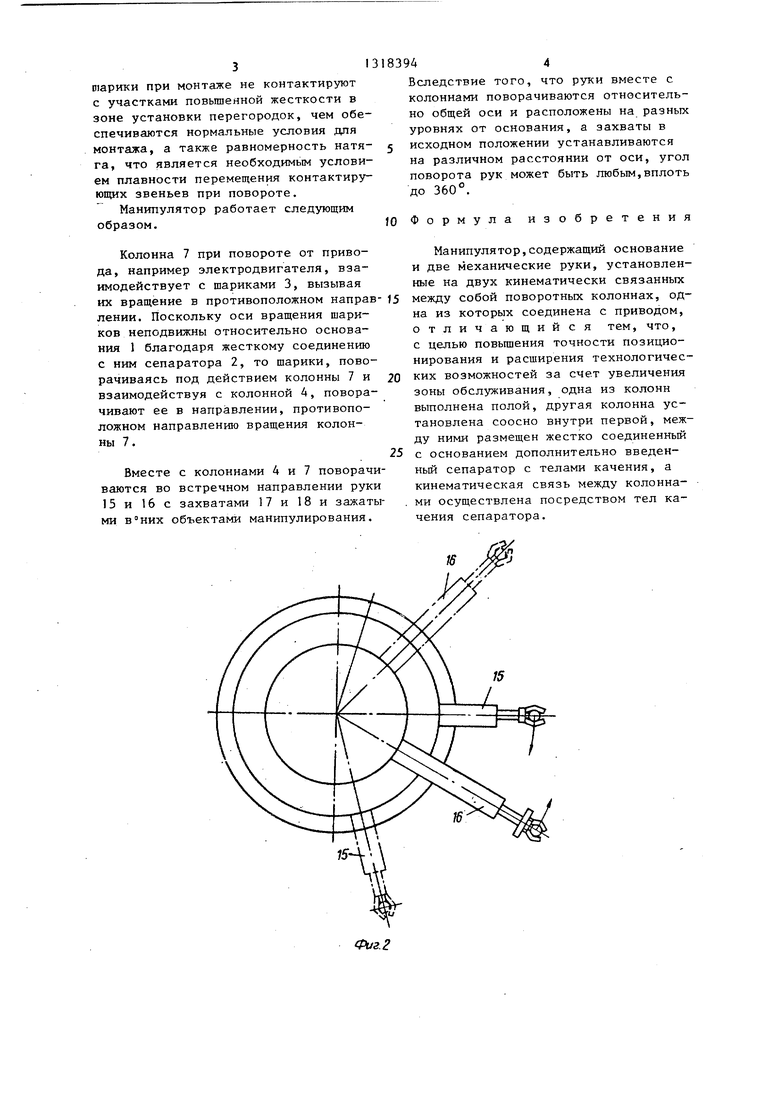
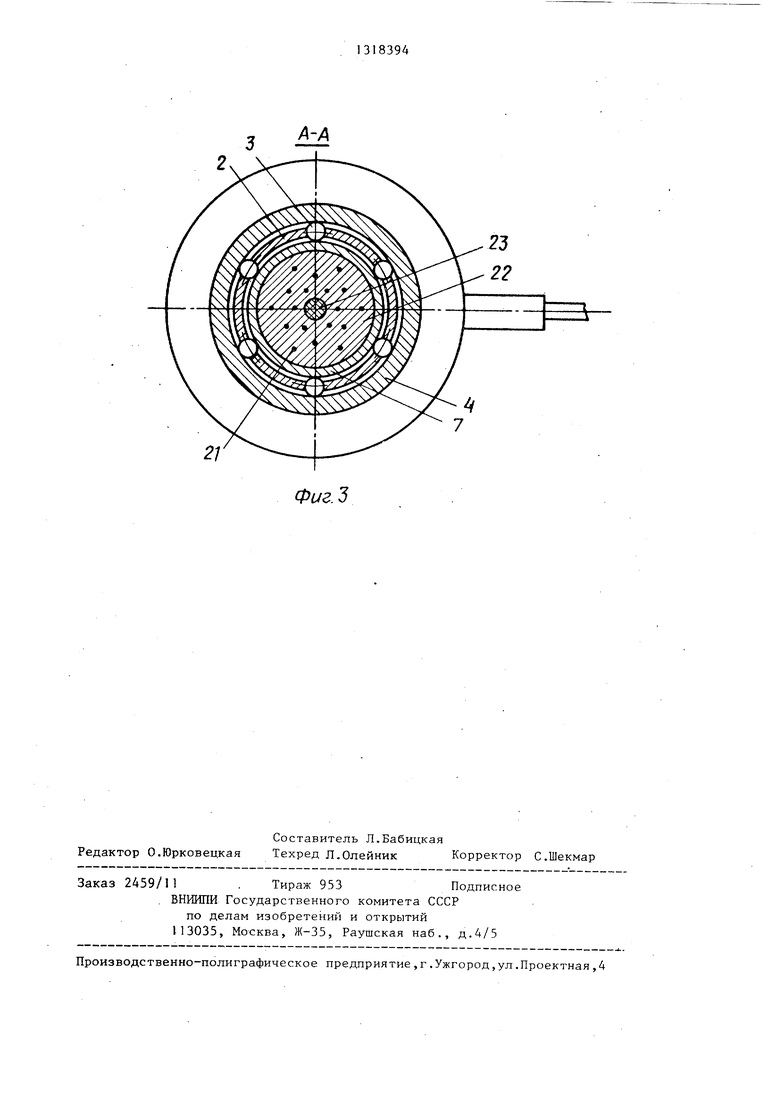
На фиг.1 показан манипулятор, общий вид,в разрезе; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.1.
Манипулятор содержит основание 1, жестко соединеннъй с основанием сепаратор 2 с установленными в нем шариками 3, полую колонну 4, которая через жестко соединенное с ней кольцо 5 и упорный подшипник 6 опирает- ся на торец сепаратора 2. Внутри колонны 4 соосно установлена колонна 7 имеющая, возможность поворота в под- щипниках 8, установленных в сепараторе 2 и фиксируемых крьопкой 9, прикрепленной к колонне 7, и крьш1кой 10, прикрепленной к сепаратору 2. Колонна 7 через прикреплеинз о к ней план- щайбу 11, двойной упорный подшипник 12 и кольцо 5 опирается при своем вращении на торец колонны 4. Шарики 3 сепаратора 2 установлены с натягом между наружной поверхностью колонны 7 и внутренней поверхностью колонны 4
На кольцевом выступе колонны 4 и планшайбе 11 закреплены соответственно держатели 13 и 14, на которых ус
394
ки связанных между собой звеньев колонна 7 может быть вьтолнена в виде упругой металлической гильзы, заполненной для увеличения жесткости упругой пластмассой 20, армированной металлическими стержнями 21. Перегородки 22, установленные внутри гильзы, повышают устойчивость колонны к поперечным изгибающим нагрузкам.Кольцевые проточки 25 на наружной поверхности гильзы компенсируют снижение упругости ее в местах установки перегородок. 3 ил.
тановлены руки 15 и 16, выполненные, например, в виде силовых цилиндров, на штоках которых установлены захваты 17 и 18. Через хвостовик 19 колонна 7 соединена с приводом (не показан).
Для компенсации износа контактирующих поверхностей и обеспечения при этом повьш енной жесткости приводной колонны 7 она может быть выполнена в виде упругой металлической гильзы, заполненной наполнителем 20, например эластичной пластмассой. Упругая гильза с наполнителем деформируется телами качения при монтаже и- распружинивается по мере износа контактирующих поверхностей, автоматически поддерживая-контакт тел качения с колоннами 4 и 7. Эффект повышения жесткости приводной колонны 7 может быть усилен армированием пластмассового наполнителя 20 металлическими стержнями 21.
Жесткость колонны 7 может быть дополнительно повьш ена путем вьтолне- ния внутри нее поперечных перегородок 22 с центральными отверстиями 23 и периферийными отверстиями 24, в которых размещены армирующие наполнитель 20 и стержни 21. Перегородки 22 расположены на одном уровне с кольцевыми проточками 25, выполненными на наружной поверхности колонны 7 и компенсирующими снижение упругости ее в местах установки перегородок 22.
Благодаря тому, что ширина проточек 25 больше тол.щины перегородок 22,
313
шарики при монтаже не контактируют с участками повышенной жесткости в зоне установки перегородок, чем обеспечиваются нормальные условия дпя монтажа, а также равномерность натяга, что является необходимым условием плавности перемещения контактирующих звеньев при повороте.
Манипулятор работает следующим образом.
Колонна 7 при повороте от привода, например электродвигателя, взаимодействует с шариками 3, вызывая их вращение в противоположном направ Ленин. Поскольку оси вращения шариков неподвижны относительно основания 1 благодаря жесткому соединению с ним сепаратора 2, то шарики, поворачиваясь под действием колонны 7 и взаимодействуя с колонной 4, поворачивают ее в направлении, противоположном направлению вращения колонны 1,
Вместе с колоннами 4 и 7 поворачиваются во встречном направлении руки 15 и 16 с захватами 17 и 18 и зажатыми объектами манипулирования.
183944
Вследствие того, что руки вместе с колоннами поворачиваются относительно общей оси и расположены на разных уровнях от основания, а захваты в
5 исходном положении устанавливаются на различном расстоянии от оси, угол поворота рук может быть любым,вплоть до 360°.
JO Формула изобретения
Манипулятор,содержащий основание и две механические руки, установленные на двух кинематически связанных между собой поворотных колоннах, одна из которых соединена с приводом, отличающийся тем, что, с целью повьппения точности позиционирования и расширения технологических возможностей за счет увеличения зоны обслуживания, одна из колонн выполнена полой, другая колонна установлена соосно внутри первой, между ними размещен жестко соединенный с основанием дополнительно введенный сепаратор с телами качения, а кинематическая связь между колоннами осуществлена посредством тел качения сепаратора.
А-А
7
Фиг.З
Редактор О.Юрковецкая
Составитель Л.Бабицкая
Техред Л.Олейник Корректор С.Шекмар
Заказ 2459/11 . Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4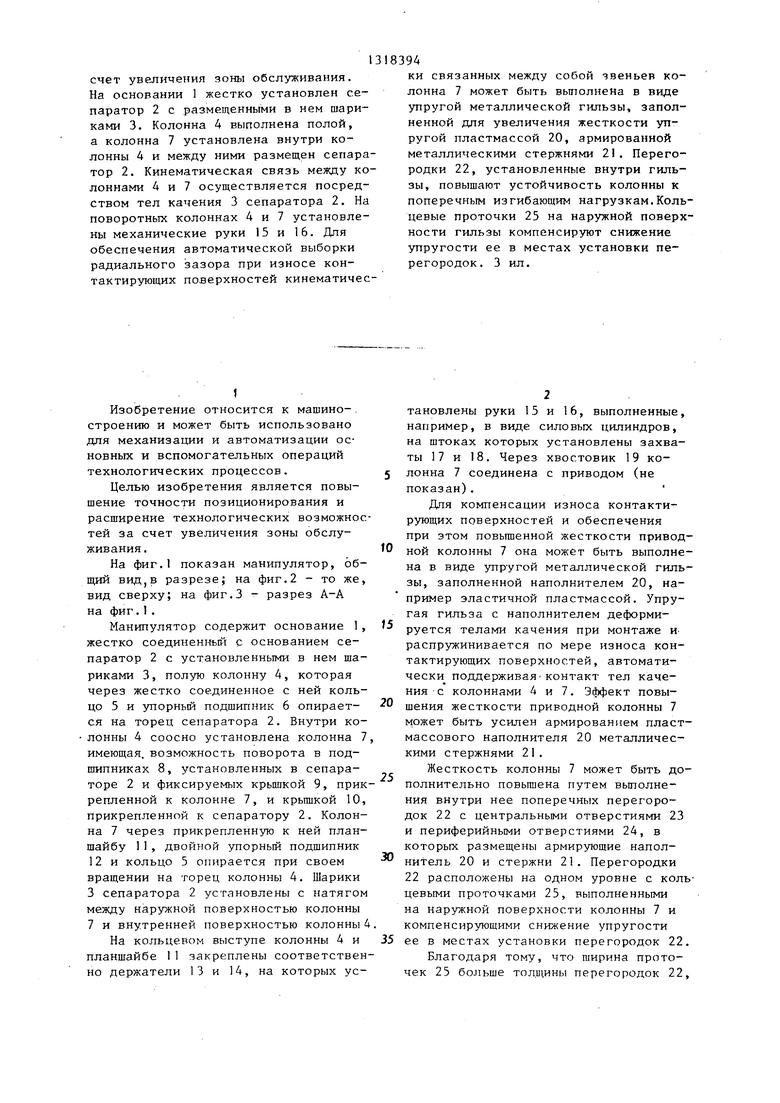
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Упругий тарельчатый элемент для станков | 2020 |
|
RU2733175C1 |
| Манипулятор | 1979 |
|
SU850372A1 |
| ПОДШИПНИК КАЧЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2006 |
|
RU2402700C2 |
| УСТРОЙСТВО ДЛЯ БАЗИРОВАНИЯ СТОЛА-СПУТНИКА | 1993 |
|
RU2102217C1 |
| ЛОПАТКА ВЕНТИЛЯТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2661439C1 |
| Устройство для сборки деталей типа вал-втулка | 1986 |
|
SU1388258A1 |
| Виброизолирующее устройство | 1988 |
|
SU1551867A1 |
Изобретение относится к области машиностроения и может быть использовано для механизации и автоматизации основных и вспомогательных операций технологических цроцессов. Целью изобретения является повьшение точности позиционирования и расширение технологических возможностей за 12 (Л 00 ас со Г) 4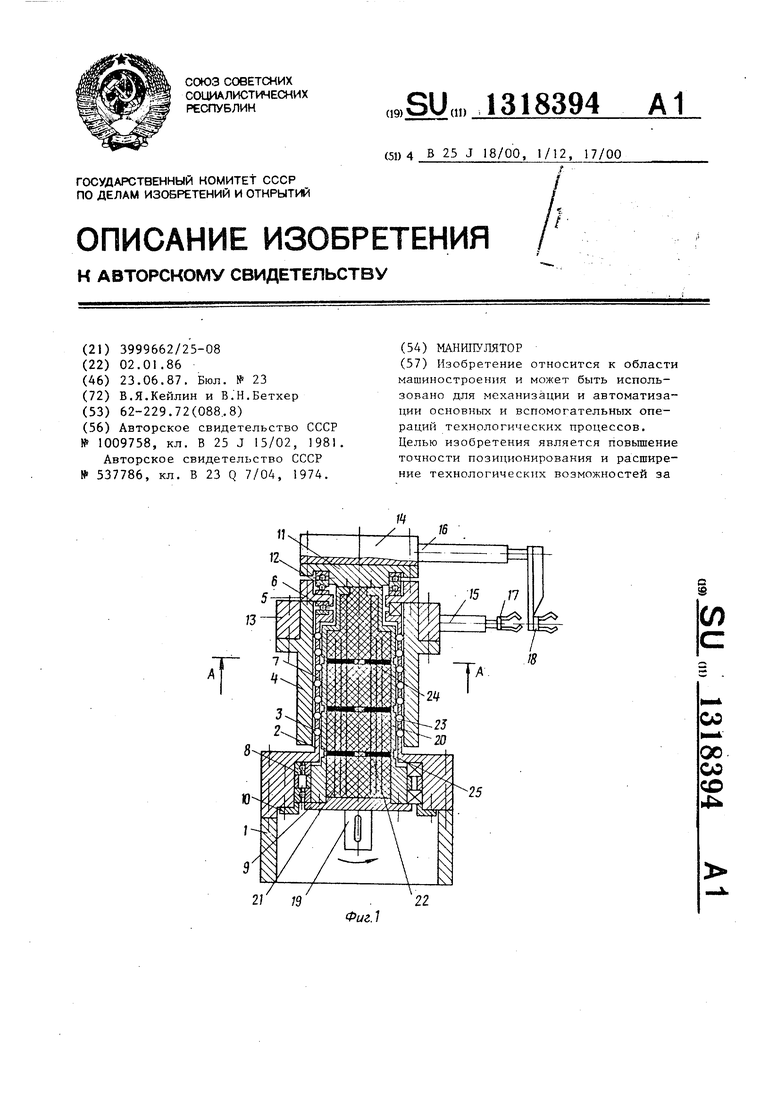
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Автооператор | 1974 |
|
SU537786A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
