(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1202861A1 |
| Захват | 1977 |
|
SU667396A1 |
| Устройство для перемещения изделий | 1987 |
|
SU1495055A1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Промышленный робот | 1986 |
|
SU1313689A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Устройство для накопления и перемещения кольцевых заготовок | 1989 |
|
SU1731374A1 |
I
Изобретение относится к машиностроению и может быть использовано в различных технологических процессах, предусматривающих применение манипуляторов.
Известен манипулятор, содержащий корпус, механическую руку с захватом, привод в виде силового цилиндра с зубчато-реечной передачей 1.
Недостатком известного манипулятора является низкая точность позиционирования, обусловленная большой стрелой прогиба руки, вызванного наличием зазоров между элементами телескопических направляющих и упругой деформацией самой руки, и не- достаточное быстродействие за счет наличия больщих подвижных масс.
Цель изобретения - повыщение точности позиционирования и увеличение быстродействия.
Указанная цель достигается тем, что манипулятор снабжен расположенными на корпусе планками и закрепленным на штоке силового цилиндра сепаратором с телами качения, причем на планках и руке выполнены продольные пазы под тела качения сепаратора, а рейка и зубчатое колесо зубчато-реечной передачи установлены соответственно на корпусе и на щтоке силового цилиндра.
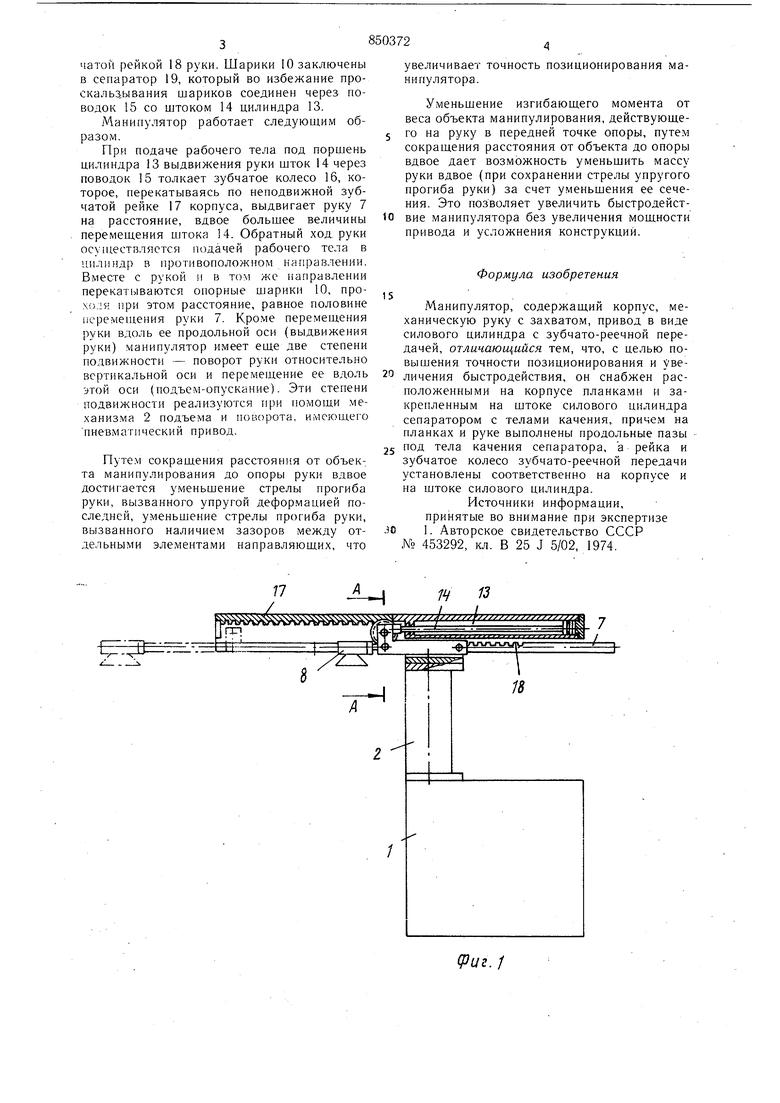
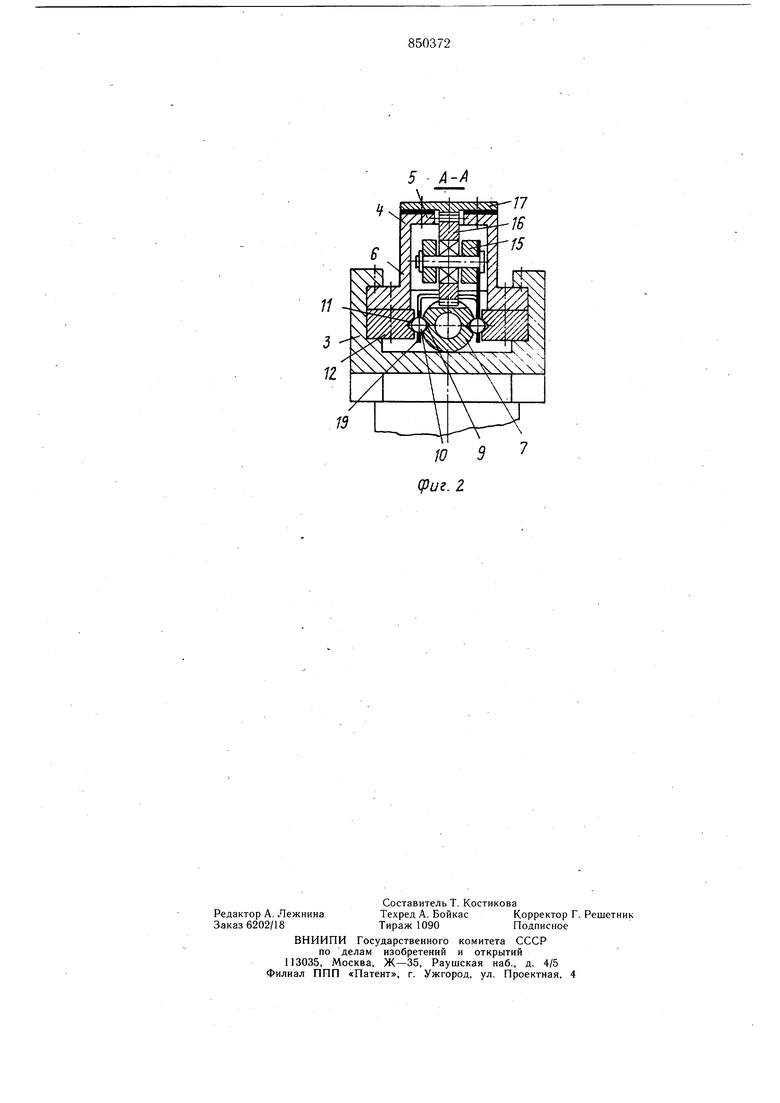
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1. - Манипулятор состоит из основания 1 с установленным на нем механизмом 2 подъема и поворота, на колонне которого через переходной фланец 3 закреплен корпус 4. Корпус выполнен в виде балки П-образного сечения с верхней 5 и боковыми 6
10 стенками, причем открытая часть сечения обращена в сторону рабочей зоны манипулятора для прохода руки 7 с захватом 8, имеющей продольные пазы 9 под тела качения, например щарики 10 в пазах 11 планок 12, прикрепленных к нижней части боковых стенок 6 балки и выступающих вперед над рабочей зоной манипулятора. В задней части корпуса 4 находится цилиндр 13 привода выдвижения руки с поршнем и щтоком 14, на переднем конце которого закреплен поводок 15, несущий ось зубчатого ко36леса 16, которое зацеплено с неподвижной зубчатой рейкой 17, установленной на верхней стенке балки корпуса, и подвижной зубчатон рейкой 18 руки. Шарики 10 заключены в сепаратор 19, который во избежание проскальаывания шариков соединен через поводок 15 со штоком 14 цилиндра 13. Манипулятор работает следуюшим образом. При подаче рабочего тела под поршень цилиндра 13 выдвижения руки шток 14 через поводок 15 толкает зубчатое колесо 16, которое, перекатываясь по неподвижной зубчатой рейке 17 корпуса, выдвигает руку 7 на расстояние, вдвое большее величины перемеиления штока 14. Обратный ход. руки осуществляется подачей рабочего тела в цилиндр в противоположном напрарзлении. Вместе с рукой и в том же направлении перекатываются опорные шарики 10, прохоля при этом расстояние, равное половине перемещения руки 7. Кроме перемещения руки вдоль ее продольной оси (выдвижения руки) манипулятор имеет еше две степени подвижности - поворот руки относительно вертикальной оси и перемещение ее вдоль этой оси (подъем-опускание). Эти степени подвижности реализуются при помощи механиз.ма 2 подъема и поворота, имеющего пневматический привод. Путем сокращения расстояния от объек-. та манипулирования до опоры руки вдвое достигается уменьшение стрелы прогиба руки, вызванного упругой деформацией последней, уменьщение стрелы прогиба руки, вызванного наличие.м зазоров между отдельными элементами направляющих, что
(Риг. 1 увеличивает точность позиционирования манипулятора. Уменьшение изгибающего момента от веса объекта манипулирования, действующего на руку в передней точке опоры, путем сокращения расстояния от объекта до опоры вдвое дает возможность уменьщить массу руки вдвое (при сохранении стрелы упругого прогиба руки) за счет уменьшения ее сечения. Это позволяет увеличить быстродействие манипулятора без увеличения мощности привода и усложнения конструкций. Формула изобретения Манипулятор, содержащий корпус, механическую руку с захватом, привод в виде силового цилиндра с зубчато-реечной передачей, отличающийся тем, что, с целью повышения точности позиционирования и увеличения быстродействия, он снабжен расположенными на корпусе планками и закрепленным на штоке силового цилиндра сепаратором с телами качения, приче.м на планках и руке выполнены продольные пазы под тела качения сепаратора, а рейка и зубчатое колесо зубчато-реечной передачи установлены соответственно на корпусе и на штоке силового цилиндра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 453292, кл. В 25 J 5/02, 1974, ..XXjyyyyXyTXjrXXXXV. X.f fffafffffiffffffffffffM
