Изобретение относится к области машиностроения, а именно к промышленным роботам и манипуляторам, преД назначенным-для механизации и автоматизации технологических процессов.
Известен схват промышленного робота, содержащий губки, установленные на приводном и ведомом звеньях, выполненных и виде реек и кинематически связанных зубчатым колесом jL
Недостатком такого охвата является невысокая кинематическая точность относительного перемещения губок из-за наличия зазоров в зубчато-реечной передаче и погрешностей изготовления зубчатых звеньев.
Наиболее близким к предлагаемому является схват промышленного робота, содержащий корпус и кинематически связанные между собой приводное и ведомое звенья с жестко закрепленными на них губками, причем приводное звено выполнено в виде установленного в корпусе цилиндрического стержня) ведомое звено в виде охватывающей стер. жень обоймы, а кинематическая связь меж ду приводным и ведомым звеньями осущесвляется посредством тел качения,установленных в сепараторе, жестко соединенном с корпусом СЗЦ.
Такой схват характеризуется высокой кинематической точностью отн.от сительного перемещения губок, однако его функциональные возможности ограничиваются лишь захватом детали.
Для компенсации износа ксэнтактиру ющих поверхностей приводное звено-в этом схвате может быть выполнено в виде упругой цилиндрической гильзы. В этом случае недостатком является снижение жесткости приводного звена.
Целью изобретения является расширение зоны манипулирования.
Цель достигается тем, что схват промышленного робота, содержащий привод, корпус, кинематически связанные мехсду собой посредством тел качения приводное и ведомое звенья, выполненные соответственно.в виде цилиндриг ческого стержня и соосно охватывающей его обоймы, а также губки и упругий элемент, снабз: ен водилом, жестко закрепленном на одной из губок установленным подвижно в другой губке, а приводное звено подпружинено упругим элементом относительно корпуса и соединено сдополнительно введенным приводом пов.орота с возможностью перемещеиия относительно, него.
Приводное звено может быть выполнено в виде металлической упругой гильзы,заполненной упругой пластмассой и армированной металлическими . стержнями.
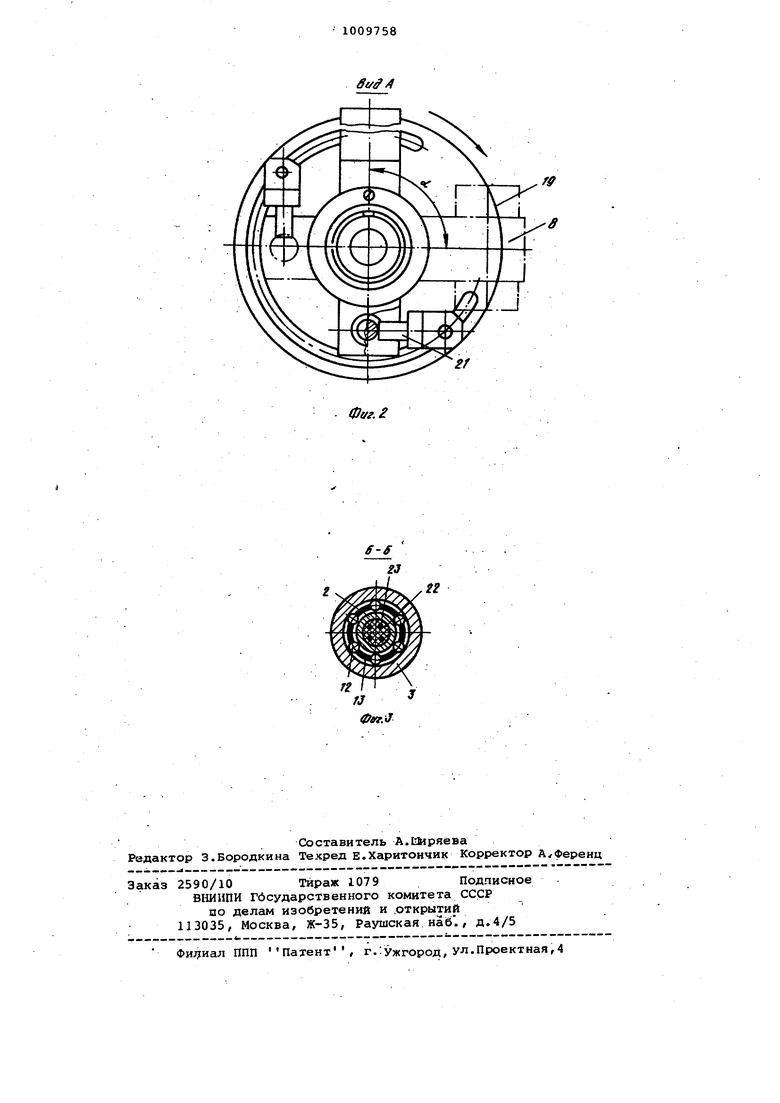
На фиг.1 изображен схват промышленного робота, разрез; на фиг.2 -ви А на фиг.1; на фиг.З - разрез Б-Б на фигЛ. ,
Схват. содержит корпус 1, стержень 2, установленный в этом корпусе с возможностью перемещения относительно него, обойму 3 с размещенной)на ней с возможностью рёгулировпи -положения губкой 4, фиксируемой винтом 5, втулку 6, установленную на стержне 2 с возможностью регулировки положения и фиксацией винтом 7.
На втулке б установлена губка 8 с возможностью поворота относительно оси стержня 2 на подшипниках 9, которые фиксируются относительно этой втулки с псяиощью. стопорного кольца .1.0 и относительно губки 8 с помощью крышки 11. Между наружной поверхностью стержня 2 и внутренней поверхностью обоймы 3 размещены с натягом шарики 12, заключенные в сепараторе 13, жестко соединенном с корпусом 1. Поверхности стержня 2 и обоймы 3, контактирующие с шариками 12, выполнены в виде круговых цилиндров, что обеспечивает возможность их вращения относительно общей оси.
В отверстии губки 8 закреплено во дйлр 1.4, которое сопрягается с отверстием губки .4 и имеет, возможность перемещения.относительно нее в направЯении смыкания ( раскрытия) губок.
В стержне 2 закреплен штифт 15, имеющий возможность Ъоворота в углЪвом пазу корпуса 1 и опирагадийся через шайбу. 16 нд. упругий элемент 17, с помощью которого и -perулщаовочного элемента 18 обеспечивается изменение усилия детали 19.
Стержень 2 соединен с приводом поворота, например, при памощя шлЬцев 20 и с приводом поступательного перемещения (на фигурах не показаны)
Угол поворота задается, например, с помос;1ью установленных на корпусе 1 с возможностью регулировки положения упоров 21.
Схват работает следующим образом. При поступательном перемещении от привода, например силового цилиндра стержень 2 взаимодействует с шариками 12, -вызывая их вращение, что в ;свою очередь выйыв|ает перемещение обоймы 3 вместе с губкой 4 в направлении, иротивополохснсм направлению перемещения стержня 2. При этом происходит смыкание (раскрытие) губок 4 и 8 и соответственно за).атие (освобождение) захватываемой детали 19.
Водило 14, закрепленное в губке В., при этом скользит в отверстии губки 4, не препятствуя .перемещению гу.бок в направлении смыкания (разжйтия
Б зависимости от размеров занимаемой детали губки 4 и 8 могут переставляться на обойме 3 и стержне 2 (губка 8 передвигается вместе с втулкой б) с фиксацией их положения в направлении общей продольной оси стержня и оооймы с помоцью винтов 5 и 7.. При поступательном перемещении стержень 2 посредством штифта.15 и шайбы 16 воздействует на элемент If, сжимая его: Усилие Зс1жима .детали обратно пропорционально силе сх{атия упругого элемента. При необходимости переориентации зажатой детали в пространстве стержень 2, находящийся под действием осевого усилия, приводится во в ращение от привода поворота, например силового цилиндра, соединенного со шлицами 20 стержя 2 с помощью рейки. При вращении стержень 2 взаимодействует с шариками 12, вызывая их вращение в плоскости, перпендикулярной продольной оси этого стержня. Поскольку осивращения шариков 12 не подвижны относительно корпуса 1, с , которым жестко соединен сепаратор 13 то вращение шариков при взаимодействии ИХ с обоймой вместе с жестко закрепленной на ней губкой 4 в направлении, противоположном направлению вращения стержня 2. При повороте губка 4 воздействует юсредством водила 14 на губку 8, jCOTopaH благодаря этому поворачива тся на подшипниках 9 вокруг оси стержня 2 в направлении поворота губ ; ки 4 на фиг.2 пунктиром.показано положение губок после поворота). Таким образом,,при вращении от привода стержня 2 происходит синхрон ный поворЬт губок 4 и 8 вместе, с зажатой между ними деталью 19 в направ лении поворота обоймы 3. Аналогично происходит поворот губок в pacKittiTOM положенйи. Угол поворота задается, например, установкой соответствующего положения на корпусе 1 упоров 21, с которыми соприкасается в крайних положениях, например, водило 14. Вращающий момент от веса зажатой в губке детали уравновешивается моментом сил сцепления между шариками и приводным и ведомым звеньями. ; Осуществлять поворот губок с помо щью известного схвата невозможно изза того, что обе губки жестко закреп лены соответственно на приводном и в домом звеньях. Поскрльку при повороте приводного звена ведомое звено поворачивается под действием шариков в противополож ном направлении, то и губки в извест ном схвате будут стремиться поворачи ваться в противоположных направлениях, что исключает возможность сохр нения фиксации детали во время поворота. Для компенсации износа, койтактирующих поверхностей и обеспечения при этом повышенной по сравнению с известным схватом жесткости приводного авена п.рсле;щее может быть выполнено, в виде упругой металлической гильзы,, заполненной эластичной пластмассой, ; например полиуретаном. Упругая гильза С наполнителем деформируется телами ркачения при монтаже и распружинива|ется по мере износа контактирующих поверхностей, автоматически поддерживая контакт тел качения с приводным ;и ведог«1м звеньями. Наличие в гильзе упругого наполни|теля увеличивает жесткость приводно:го: эвена и силы сцепления мезвду .те-.. i лаими качения и приводным йведомым i звеньямид что повышает нагрузочную способност схвата. Эффект повышения жесткости приводного звена может быть усилен армированием.пластмассового наполнителя 22 металлическими стержнями 23. Наличие в предлагаемся схвате дополнительной степени свободы ( губок) значительно расширяет его .функциональные и технологические воз можности по сравнению с известншл схватом, позволяя не только зажимать с помощью. схвата деталь, но и осу-г ществлять переориентацию ее в пространстве с высокой точностью благодаря использованию беззазорной.кинёмаг тической передачи. .... При использовании известного схвата осуществигсь поворот детали после ее зажатия можно лишь при применении манипулятора, содержащего механизм поворота кисти. В этом случае привод кисти при поворо.те зажатой детали в пространстве должен перемещать суммарную массу кисти всего схвата и детали, что ухудшает динамические и точност:иые . показатели работы промышленного робота и увеличивает мощ- ность привода, необходимую для поворот детали, по сравнению с вариантом робота с предлагаемым схватом, у которого зажатие и поворот детали осуществляются при помощи одной и. той же входя«® состав схвата кинематической передачи и при повороте детали вместе с ней в пространстве перемещаются только губки, масса которых незначи«тельна. Таким образом, применение .предлагаемого схвата позволит использовать для манипулирования детгшями при ав томатизации технологических процессов более простые устройства, улучшить показатели их работы. .
rff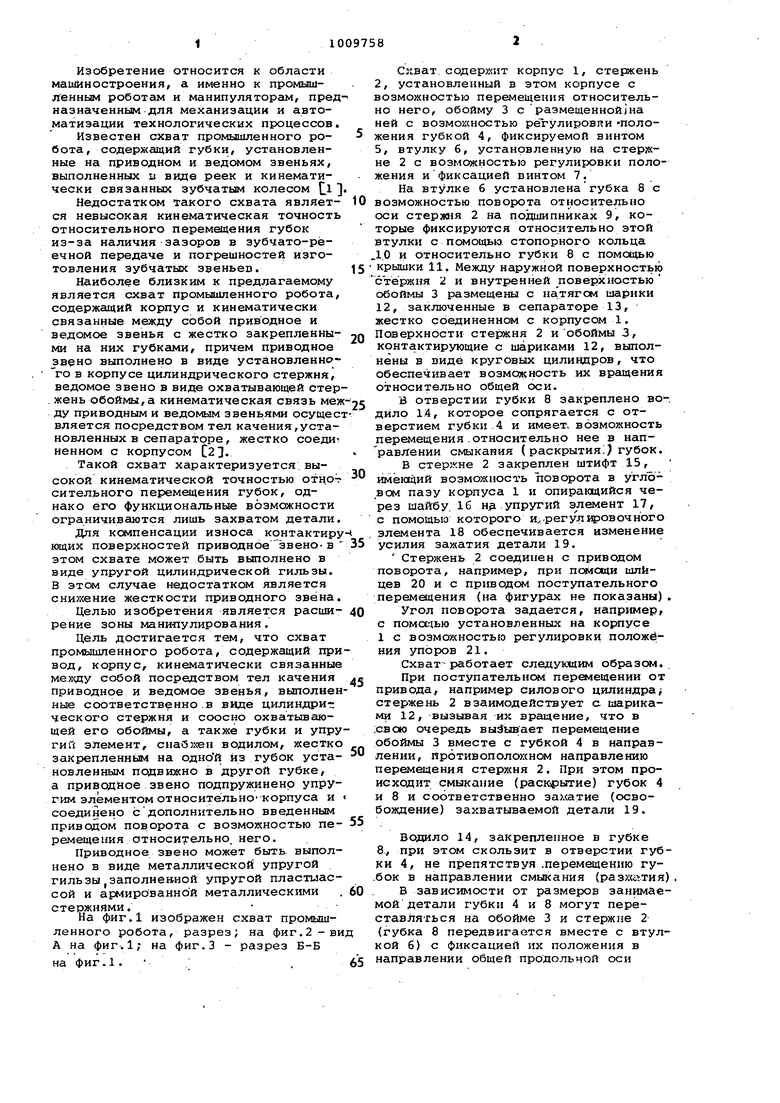

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Манипулятор | 1986 |
|
SU1318394A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват промышленного робота | 1987 |
|
SU1442399A1 |
1. СХВАТ |ПРО№311ШЕИНОГО РОБОТА,, содержащий привод, кррпус, кинематически -связаниые между собой посредством тел качения приводное и ведомое звенья, выполненные соответст- венно э виде цилиндрического стержня и соосно охватывающей его обоймы, а ., также губки и упругий элемент, о тличающийся тем,, что, с целью расширения зоны манипухшрования, .он снабжен водилом, жестко закрепленньм- на одной из губок иустановленным подвижно в другой Губке, а приводное звено{подпружинено упругим элементом относительно корпуса и соединено с дополнительно введенньм приводом с возможностью перемацения относительно него. 2. Схват по n.i, о т л и ч а щ и и с я тем, что приводное звено выполнено в виде металлической упругой гильзы, заполненной упругой пластмассой и армированной металлическими стержня.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| . | |||
