(54) СХВАТ ПРОМЫШЛЕННОГО РОБОТА

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Схват промышленного робота | 1987 |
|
SU1430264A1 |
| Захватное устройство | 1984 |
|
SU1234183A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Манипулятор | 1986 |
|
SU1318394A1 |
1
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для механизации и автоматизации технологических процессов.
Известен схват промышленного робота, содержаш,ий корпус, кинематически связанные межДу собой приводное и ведомое звенья с установленными на них губками, а также упругий элемент 1.
Недостатком известного схвата является то, что он не обеспечивает высокой кинематической точности относительного перемещения губок ввиду наличия зазоров в зубчатых парах и других погрешностей кинематических параметров зубчато-реечной передачи, обуславливаемых неизбежными погрешностями изготовления зубчатых звеньев. Кроме того, размеш,ение в схвате упругого элемента между губками сужает диапазон габаритных размеров захватывае.мых деталей, так как габаритный размер, по которому захватывается деталь, не может быть меньше суммы соответствуюших размеров регулировочных элементов и упругого элемента, размер которого в направлении
зажима определяется требуемым усилием зажима и максимальной величиной сжатия.
Цель изобретения - расширение технологических возможностей.
Для достижения поставленной цели схват снабжен жестко соединенным с корпусом сепаратором с установленными в нем телами качения, приводное звено выполнено в виде установленного в корпусе цилиндрического стержня, а ведомое звено - в виде соосно охватываюш,ей этот стержень обоймы, причем кинематическая связь между приводным и ведомым звеньями осушествляется посредством упомянутых тел качения, упругий элемент расположен между корпусом и одной из губок, а приводное звено выполнено в виде упругой цилиндрической гильзы.
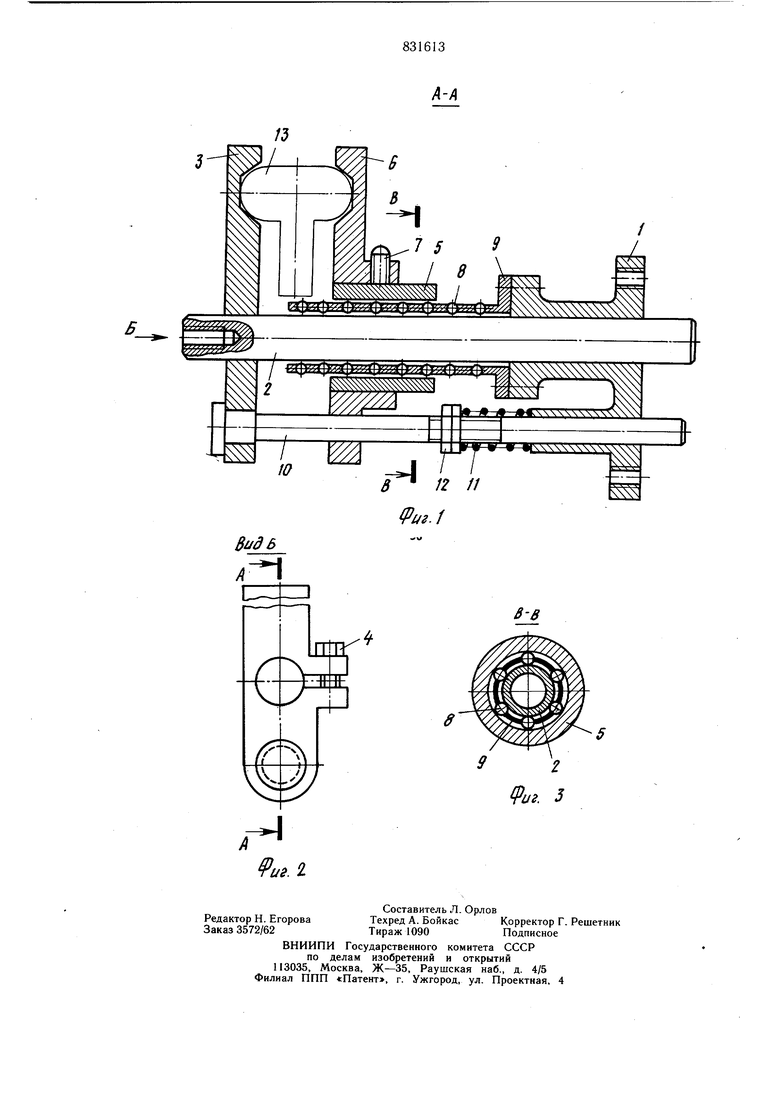
На «фиг. 1 изображен схват промышленного робота (разрез А-А на фиг. 2); на фиг. 2 - вид Б, на фиг. 1; на фиг. 3 - разрез В-В на фиг. 1 (вариант исполнения с приводным звеном в виде цилиндрической гильзы). Схват содержит корпус 1, стержень 2, установленный в корпусе 1 с возможностью перемещения относительно него,губку 3, закрепленную на стержне 2 с возможностью регулировки ее положения вдоль оси стержня и фиксацией винтом 4, обойму 5 с установленной на ней с возможностью регулировки положения губкой 6, фиксируемой винтом 7. Между наружной поверхностью стержня 2 и внутренней поверхностью обоймы 5 установлены с натягом тела качения, например шарики 8, заключенные в сепараторе 9, Йоторый жестко соединен с корпусом 1. Концы губок, расположенные в нерабочей зоне соединены стержнем 10, жестко закрепленным в губке 3 и подвижным относительно губки 6 и корпуса 1. На стержн.10 установлен упругий элемент Пи регулировочные элементы 12, обеспечивающие изменения усилия зажатия захватываемой детали 13. Схват работает следующим образом. При перемещении от привода, например силового цилиндра стержень 2 взаимодействует с телами 8 качения, вызывая их вращение. Посольку оси вращения тел 8 качения неподвижны относительно корпуса 1, с которым жестко соединен сепаратор 9, то вращение тел 8 качения при взаимодействии их с обоймой 5 вызывает перемещение обоймы в направлении, противоположном направлению перемещения стержня 2. При этом происходит смыкание (раскрытие) губок и соответственно зажатие (освобождение) захватываемой детали 13. Губка 3 посредством стержня 10, жестко закрепленного в ней, и регулировочных элементов 12 воздействует на упругий элемент 11, сжимая его. В зависимости от размеров зажимаемой детали губки 3 и 6 могут переставляться на стержне 2 и обойме 5 с установкой требуемого расстояния между ними и фиксироваться винтами 4 и 7. Усилие зажима детали обратно пропорционально силе сжатия упругого элемента. Для компенсации износа контактирующих поверхностей и увеличения нагрузочной способности схвата приводное звено может быть выполнено в виде упругой цилиндрической гильзы, деформируемой телами качения при монтаже. По мере износа контактирующих поверхностей цилиндрическая гильза распружинивает, автоматически поддерживая контакт тел качения с приводным и ведомым звеньями. Формула изобретения 1.Схват промыщленного робота, содержащий корпус, кинематически связанные между собой приводное и ведомое звенья с установленными на них губками, а также упругий элемент, отличающийся тем, что, с целью расщирения технологических возвожностей, он снабжен жестко соединенным с корпусом сепаратором с установленными в нем телами качения, приводное звено выполнено в виде установленного в корпусе цилиндрического стержня, а ведомое звено - в виде соосно охватывающей этот стержень обоймы, причем кинематическая связь между приводным и ведомым звеньями осуществляется посредством упомянутых тел качения, а упругий элемент расположен между корпусом и одной из губок. 2.Схват по п. 1, отличающийся тем, что приводное звено выполнено в виде упругой цилиндрической гильзы. Источники информации, принятые во внимание при 3Kcnepfn3e 1. Авторское свидетельство СССР № 638462, кл. В 25 J 15/02, 1977.
