1
Изобретение относится к электротехнике и может быть использовано в системах прямого цифрового управления вентильными преобразователями и, в частности, в приводах постоянного тока с вентильны ш преобразователями ,
Цель изобретения повышение точности линеаризации статической регулировочной характеристики.
На фиг. 1 представлена схема устройства, 15еализующего предлагаемый способ; на фиг. 2 - диаграммы, поясняющие его работу.
Устройство,реализукщее предлагаемый способ, содержит блок 1 совпадения, информационные входы 2 которого служат для задания кода управления, выходы соединены с входами блока 3 памяти, а управляющий вход блока 1 и вход элемента Д задержки соединены и являются входом 5 синхронизации, выход элемента 4 соединен с S-входом RS-триггера 6, R-вход которого подключен к выходу дешифратора 7, а прямой выход соединен с одним входом элемента И 8, другой вход 9 которого предназначен для подачи импульсов тактовой частоты, выход элемента 8 соединен со счетным входом счетчика 10, к входам записи которого подключены выходы блока 3. К стробирующему входу счетчика 10 подключен выход элемента 4, выходы счетчика 10 связаны с входом дешифратора 7, выход которого подключен к двухканальному коммутатору 11, управляю1ций вход которого соединен с первым входом вновь введенного бло .ка 12 суммирования, содержащего элемент ИСКЛОЧАЮЩЕЕ ИЛИ 13, блок 14 элементов ИСКЛЮЧАЮЩЕЕ и сумматор 15 и является входом 16 знака задания, второй вход элемента 13 является входом 17 знака ЭДС нагрузки, выход элемента 13 соединен с входом переноса сумматора 15 и с входом блока 14, информационные входы 18 которого служат для подачи кода ЭДС нагрузки а выходы соединены с первым входом сумматора 15, второй вход которого является входом 19 кода постоянного смещения, выход сумматора соединен с вторым входом блока 1, выходы 20 и 21 двухканального коммутатора являются выходами устройства.
Устройство работает следующим образом.
-
192002
Выпрямительный или 1П1вертор11ЫН режим работы преобразователя определяется с помощью элемента 13 блока 12, на входы 16 и 17 которого пода- 5 ется информация о знаке кода задания Ny и знаке кода ЭДС нагрузки Ел. При совпадении знаков на этих входах на выходе элемента 13 устанавливается уровень логического О
и код ЭДС нагрузки , поступающий на вход 18, проходит через блок 14 на вход сумматора 15 без изменений и складывается с кодом постоянного смещения N , поступающим на вход
J го
- 19. При несовпадении знаков на выходе элемента 13 устанавливается уровень логической 1, а информация с входа 18 поступает на вход сумматора в обратном коде и вычитается из
20 кода постоянного смещения N,,. Чтобы результат операции вычитания был верен, необходимо к полученному результату добавить единицу, что реализуется соединением входа переноса сумматора 15 с выходом элемента 13 и с управляющим входом блока 14. С выхода сумматора 15 код N подается на вход блока 1.
На входах блока 1 происходит объе30 динение кода задания |N и кода
Nj. Причем код N образует младшие . К разрядов адреса А блока 3, а код INyI - старшие.
Поскольку код iNyIB формате адре35 са А оказывается сдвинутым на К разрядов влево, что соответствует умножению на 2 , то можно записать, что А 2 lN.,1+N5. Информация в блок 1 записывается в момент времени t корот40 кими импульсами, поступающими с входа 5 синхронизации (фиг. 2 е), которые формируются при переходе напряжения сети через нуль. Объединенный код lN,l и N5 подается на входы реса блока 3, который линеаризует зависимость тока от кода задания
V.-NV ,
Код N угла управления появляет- ся на выходе блока 3 памяти с неко Q торой задержкой относительно формирования адреса. Этим объясняется наличие в устройстве элемента 4, который задерживает импульсы с входа 5 на время зСфиг. 2 v), необходимое
.j для выбора нового значения кода N из блока 3. Код N, связанный пропорциональной зависимостью с углом управления, является сигналом управления преобразователем. Этот сигнал
подается нд преобразователь код - временной интервал, реализованный на счетчике 10, дешифраторе 7, триггере 6 и элементе 8,
Преобразователь код - временной интервал осуществляет преобразование кода управления преобразователем N в фазовый сдвиг импульсов управления следующим образом.
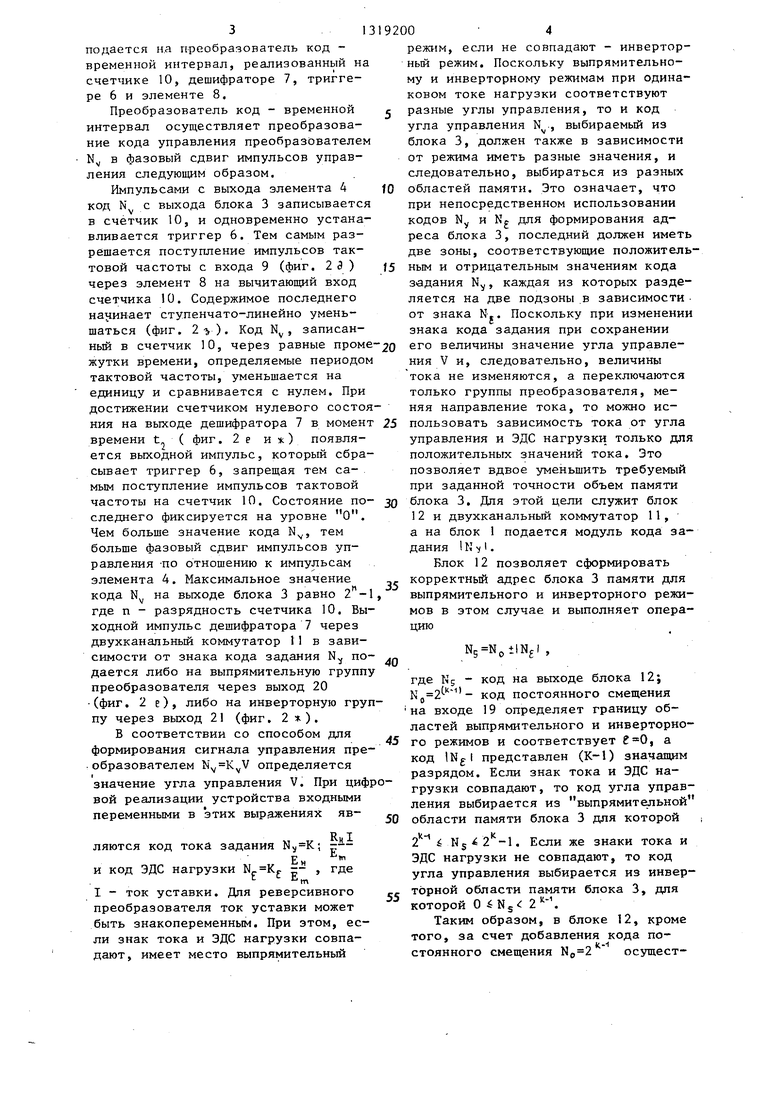
Импульсами с выхода элемента 4 код N с выхода блока 3 записывается в счетчик 10, и одновременно устанавливается триггер 6. Тем самым разрешается поступление импульсов тактовой частоты с входа 9 (фиг. 23) через элемент 8 на вычитающий вход счетчика 10. Содержимое последнего начинает ступенчато-линейно уменьшаться (фиг. 2). Код N , записанный в счетчик 10, через равные проме жутки времени, определяемые периодом тактовой частоты, уменьшается на единицу и сравнивается с нулем. При достижении счетчиком нулевого состояния на выходе дешифратора 7 в момент времени t ( фиг. 2 е и ж) появляется выходной импульс, который сбрасывает триггер 6, запрещая тем самым поступление импульсов тактовой частоты на счетчик 10. Состояние по- следнего фиксируется на уровне О. Чем больще значение кода N, тем
больше фазовый сдвиг импульсов управления -по отношению к импульсам элемента 4. Максимальное значение кода N на выходе блока 3 равно ,
где п - разрядность счетчика 10. Выходной импульс дешифратора 7 через двухканальный коммутатор 11 в зависимости от знака кода задания N по- дается либо на выпрямительную группу преобразователя через выход 20
-(фиг, 2 Е), либо на инверторную группу через выход 21 (фиг. 2 ж).
В соответствии со способом для формирования сигнала управления пре.образователем определяется значение угла управления V. При цифровой реализации устройства входными переменными в этих выражениях яв-
RM ,v--, ляются код тока задания
EH
и код ЭДС нагрузки N,.Kc -- , где
I - ток уставки. Для реверсивного
преобразователя ток уставки может быть знакопеременным. При этом, если знак тока и ЭДС нагрузки совпадают, имеет место выпрямительный
O 5 о 5 о
5
,.
д
5
5
режим, если не совпадают - инвертор- ный режим. Поскольку выпрямительному и инверторноьгу режимам при одинаковом токе нагрузки соответствуют разные углы управления, то и код угла управления N, выбираемый из блока 3, должен также в зависимости от режима иметь разные значения, и следовательно, выбираться из разных областей памяти. Это означает, что при непосредственном использовании кодов N, и N для формирования адреса блока 3, последний должен иметь две зоны, соответствующие положительным и отрицательным значениям кода задания N, каждая из которых разделяется на две подзоны .в зависимости от знака N. Поскольку при изменении знака кода задания при сохранении его величины значение угла управления V и, следовательно, величины тока не изменяются, а переключаются только группы преобразователя, меняя направление тока, то можно использовать зависимость тока от угла управления и ЭДС нагрузки только для положительных значений тока. Это позволяет вдвое уменьшить требуемый при заданной точности объем памяти блока 3, Для этой цели служит блок 12 и двухканальный коммутатор 11, а на блок 1 подается модуль кода задания 1N V I.
Блок 12 позволяет сформировать корректный адрес блока 3 памяти для выпрямительного и инверторного режимов в этом случае и выполняет операцию
,ilNjl,
где Ng - код на выходе блока 12; N5 2 - - код постоянного смещения на входе 19 определяет границу областей выпрямительного и инверторного режимов и соответствует , а код iNg I представлен (К-1) значащим разрядом. Если знак тока и ЭДС нагрузки совпадают, то код угла управления выбирается из выпрямительной области памяти блока 3 для которой
Ь .1
2 -1. Если же знаки тока и ЭДС нагрузки не совпадают, то код угла управления выбирается из инвер- торной области памяти блока 3, дпя которой О iNs .
Таким образом, в блоке 12, кроме того, за счет добавления кода постоянного смещения
К-1
осущест51
вляется перенос точки отсчета и упорядочивается размещение кодов в блоке 3 при изменении е„,ц f g е„якс , так как код N на выходе блока 12, участвующий в формировании адреса, при этом изменяется в пределах 0 N5 2-1.
При программировании блока 3 в соответствии со способом задают граничное значение кода задания Ny
RH К -- Ipp , где 1рГ граничное значеЬ-т
ние тока уставки, и код угла управления преобразователем N на выходе блока 3 памяти определяют в режиме непрерывного тока при
А7 А, /N
W+NS
K,N,+ F :; -arcsin ----M)
m
К
a в pemiMQ прерывистых токов при А А - как
-K,(-| K.N.
- + х .- N.
arcsin
m
2 K e
sin Л /2
),
r, ТГ „ IMCIHC,, Nf /jeKcEm
где К;- -- - , Kg- - ;;;-
m ,a
ИСЧКС
Ку -- H -S. масштабные коэффици- У„„кс .
При таком задании кодов блока 3 осуществляетсялинеаризация регулировочной характеристики как в области непрерывных, так и в области прерывистых токов и обеспечивается линейная зависимость тока от кода задания ,.
Таким образом, устройство, реализуя предлагаемьй способ, позволяет достичь качественно норой ступени в точности линеаризации характеристики преобразователя за счет получения линейной характеристики в области прерьшистых и непрерывных токов и малой инструментальной погрешности,,
Формула изобретения
Способ управления вентильным преобразователем, заютючающийся в том, что формируют уставку тока I, изме192006
ряют противо-ЭДС нагрузки Е , формируют сигнал управления преобразователем Uy, пропорциональный углу управления V, сравнивают сигнал управ- 5 ления с опорным сигналом и в моменты равенства формируют импульсы управления вентильным преобразователем, отличающийся тем, что, с целью повышения точности линеаризации статической регулировочной характеристики, задают граничное зна10
Em Г 1П
чение тока уставки Inp п 1тт
sin(V.p+
ч i-H 1
rJ
sin -
m
сравнивают его
и
. т Ё,,
с уставкой тока, сигнал управления преобразователем для токов уставки Превышающих 1 определяют пропорциональным Vj 1| - - -arcsin (R 1+Ец ) /
, m. . 1-1 /Е . sin - J , а для токов уставки
меньше 1 ропределяют пропорциональ- V,,.t-i-arc.b(|iI.M|)/
ным
m
/ . Д 1
/sin - , где угловая длительностьимпульсов тока Л удовлетворяет урав
ЕН
,Л5и нению -- -COS0 sin(V-8 + )- .
Е i-Ett,
-cos 0 sin(V-0)jexp(-Actg9), угол уп- равнения преобразователе 1 , соответствующий - гранично-непрерывному режиму, определяют из выражения
-Ч +0-агс81п Ен (1- В) / (Е АсозБ )
О -где (- -- ctgG);
Иссоз 21 Ш
D,/.()
m
4(/+arctg
. 21) sin - m
cos2 / /m-Dn
E - абсолютное значение ЭДС нагрузки;
Е| - амплитуда ЭДС преобразователя;
а
У arctg --- - фазовый угол грузки;
R, - сопротивление нагрузки; Ь„ - индуктивность нагрузки; и)(, - круговая частота сети; iti - число фаз преобразователя.
го.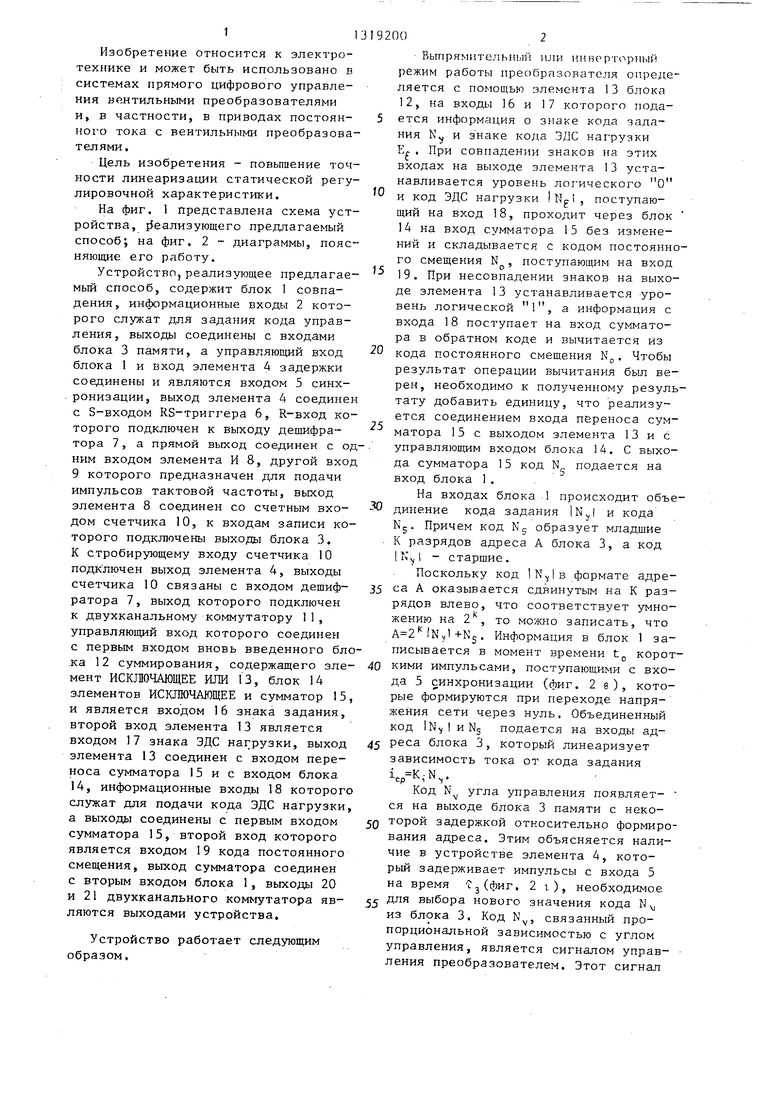
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным преобразователем | 1990 |
|
SU1739457A1 |
| Устройство для управления тиристорным преобразователем | 1990 |
|
SU1777217A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Адаптивный регулятор для управляемых вентильных преобразователей /его варианты/ | 1983 |
|
SU1104629A1 |
| Способ цифрового управления непосредственным преобразователем частоты | 1985 |
|
SU1350787A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| Электропривод переменного тока | 1988 |
|
SU1615856A1 |
| Способ управления полностью управляемым вентильным преобразователем | 1983 |
|
SU1173503A1 |
| Способ поочередного управления преобразователем | 1984 |
|
SU1282288A1 |
| Способ управления вентильным преобразователем | 1982 |
|
SU1083322A1 |
Изобретение относится к электротехнике и может быть использовано в системах цифрового управления преобразователями. Целью изобретения является повышение точности линеаризации статической регулировочной характеристики. В данном способе задают граничное значение тока уставки, сравнивают его с уставкой тока и сигнал управления формируют в зависимости от того, выше или ниже ток уставки его граничного значения. 2 ил. со
%
да
lU
nnintii
liinNllinil
jmt 3
U
(
Л, tz
t /%//
Редактор И.Шулла
фуг. 2
Составитель В.Миронов Техред Н. Глутденко
Заказ 2525/52 Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производстве 1но-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fj
Корректор Т.Колб
| Способ управления вентильным преобразователем | 1978 |
|
SU921026A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Динамика вентильного электропривода постоянного тока./Под ред | |||
| А.Д.Позеева | |||
| М.: Энергия, 1975, с | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
