Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе переменного тока.
Целью изобретения является улучшение динамических показателей путем повышения быстродействия.
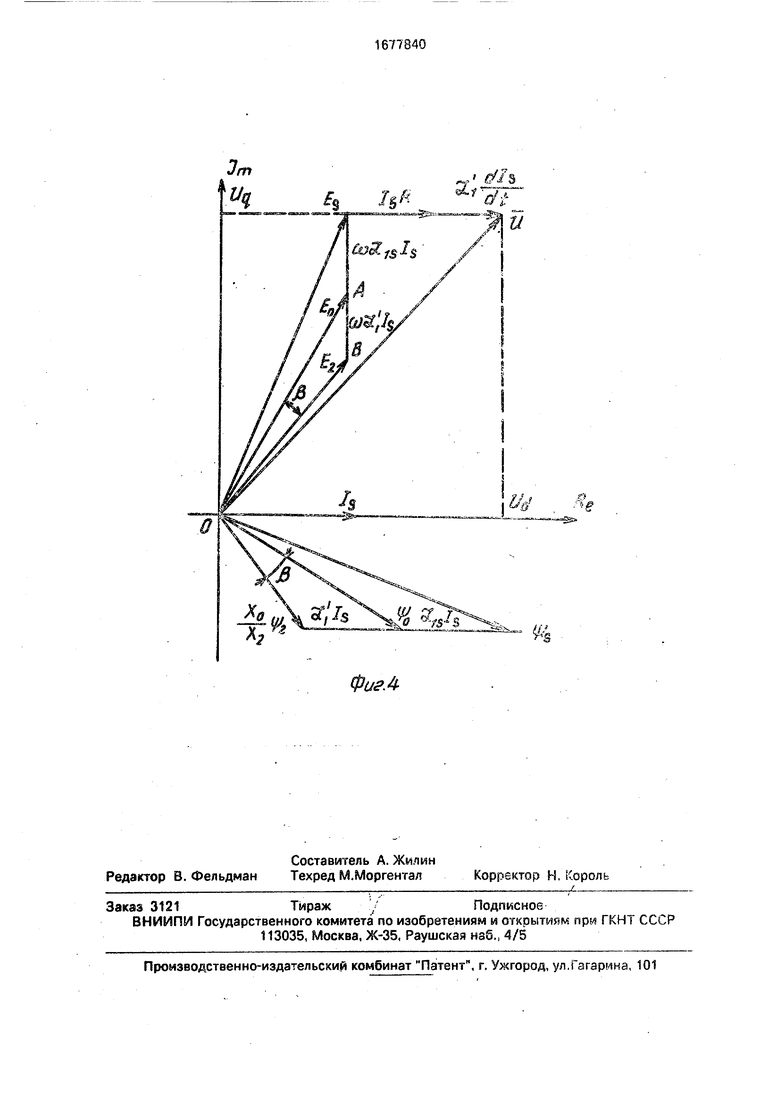
На фиг. 1 представлена функциональная схема частотно-управляемого привода; на фиг. 2 - функциональная схема блока определения модуля тока во вращающейся системе координат; на фиг. 3 - функциональная схема дифференцирующего блока; а на фиг. 4 - векторная диаграмма.
Частотно-управляемый электропривод содержит асинхронный двигатель 1, подключенный к выходам силового преобразователя 2 частоты, регуляторы 3, 4
составляющих тока статора, выходы которых подключены к первым двум основным входам блока 5 вычисления задающих переменных. Блок 6 задания управляющих сигналов соединен с первыми входами регуляторов 3 и 4 составляющих тока статора. Выходы датчика 7 фазных токов соединены с входами блока 8 преобразования фазных токов, выход которого соединен с входом блока 9 вычисления текущих переменных. Кроме того, выход силового преобразователя 2 соединен с соответствующим входом блока 9 вычисления текущих переменных через блок 10 определения составляющих напряжения. Блок 9 вычисления Текущих переменных имеет четыре выхода, два из которых образуют опорные входы блока 5 вычисления задающих переменных.
О
VI
VI 00
Рь О
о
В частотно-управляемый электропривод введены блок 11 определения модуля тока во вращающейся системе координат с частотным и токовым входами и дифференцирующий блок 12 с двумя выходами и три сумматора 13, 14 и 15. Частотный вход блока 11 определения модуля тока подключен к выходу преобразователя 16 напряжение-частота, а токовый вход блока 11 подключен к выходу блока 8 преобразования фазных токов. Выход блока 11 определения модуля тока подключен ко входу дифференцирующего блока 12, первый выход которого подключен к первому входу сумматора 13, а второй выход - к первому входу второго сумматора 14 и первому входу третьего сумматора 15. Вторые входы сумматоров 13, 14 подключены соответственно к выходам блока 9 вычисления текущих переменных, а их выходы подключены ко входам регуляторов 3,4 тока статора. Второй вход третьего сумматора 15 подключен к выходу блока 6 задания управляющих сигналов, а выход - ко входу преобразователя 16 напряжение-частота.
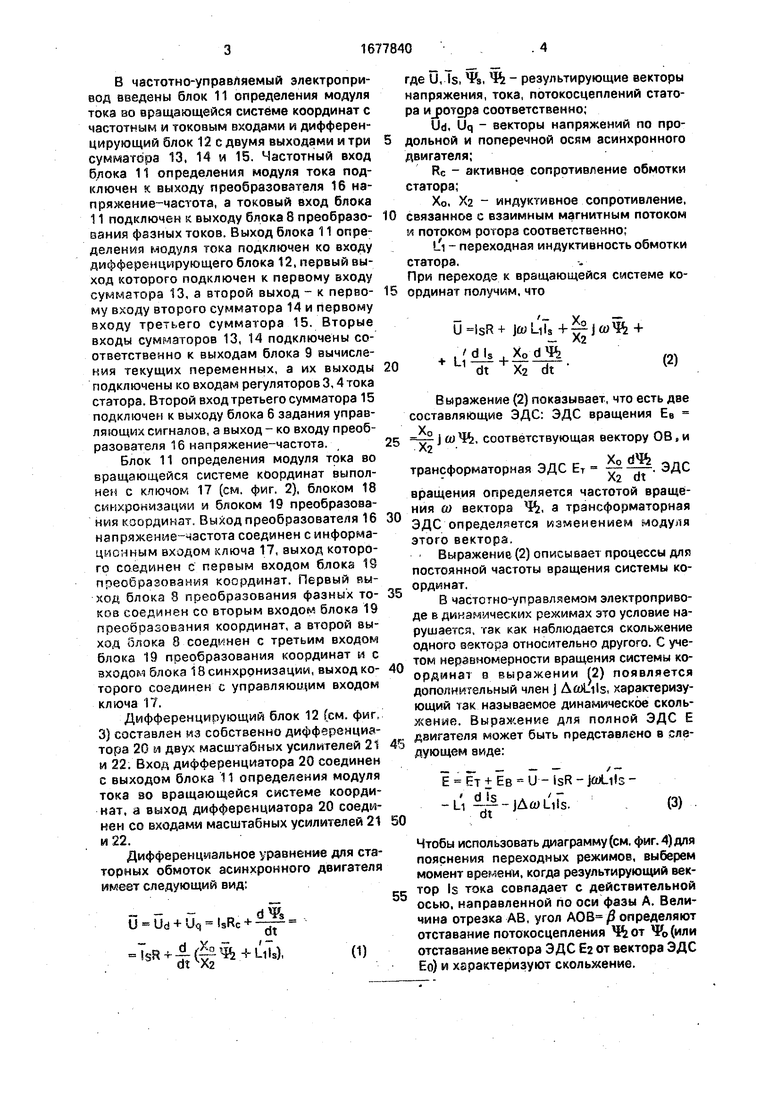
Блок 11 определения модуля тока во вращающейся системе координат выполнен с ключом 17 (см. фиг. 2), блоком 18 синхронизации и блоком 19 преобразования координат. Выход преобразователя 16 напряжение-частота соединен с информационным входом ключа 17, выход которого соединен с первым входом блока 19 преобразования координат. Первый выход блока 8 преобразования фазных токов соединен со вторым входом блока 19 преобразования координат, а второй выход блока 8 соединен с третьим входом блока 19 преобразования координат и с входом блока 18 синхронизации, выход которого соединен с управляющим входом ключа 17.
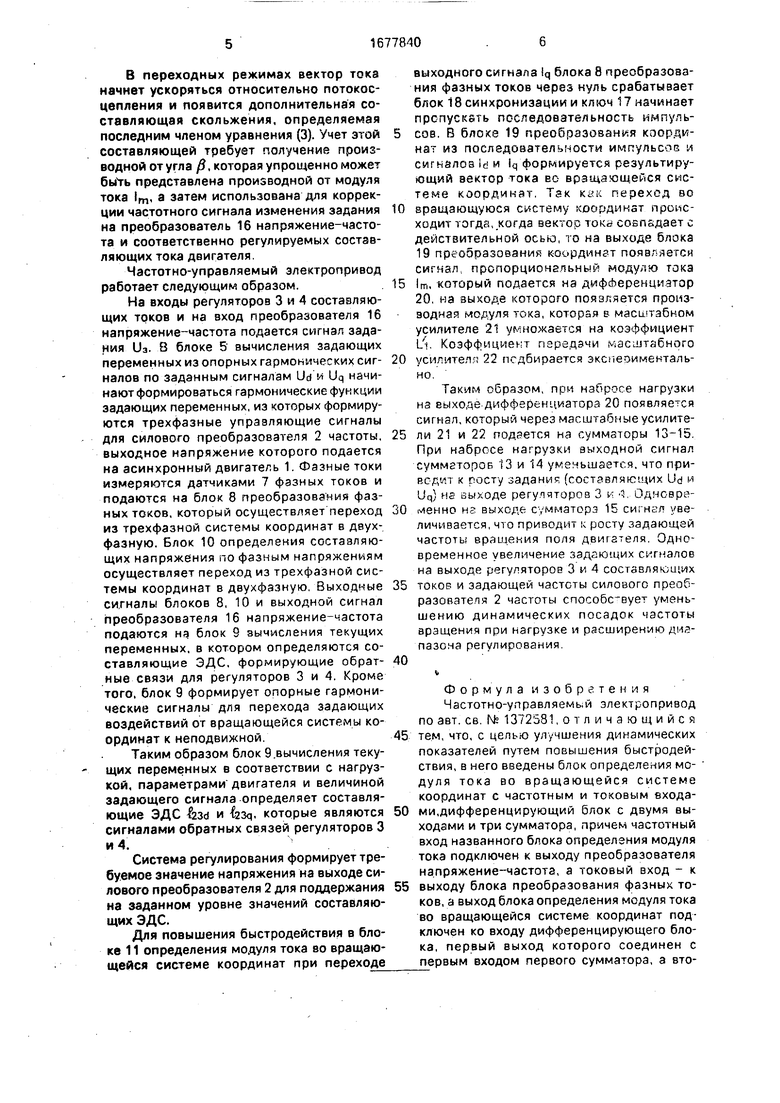
Дифференцирующий блок 12 (см. фиг, 3) составлен из собственно дифференциатора 20 и двух масштабных усилителей 21 и 22. Вход дифференциатора 20 соединен с выходом блока 11 определения модуля тока во вращающейся системе координат, а выход дифференциатора 20 соединен со входами масштабных усилителей 21 и 22.
Дифференциальное уравнение для ста- торных обмоток асинхронного двигатели имеет следующий вид:
U - Ud + Uq - URc +
dWs dt
TsR + (§4b+LiTj,
где U, 7s, , ft результирующие векторы напряжения, тока, потокосцеплений статора HjpOTgpa соответственно;
Ud, Uq - векторы напряжений по про- дольной и поперечной осям асинхронного двигателя;
Re - активное сопротивление обмотки статора;
Х0, Х2 - индуктивное сопротивление, связанное с взаимным магнитным потоком и потоком ротора соответственно;
tfi - переходная индуктивность обмотки статора.
При переходе к вращающейся системе ко- ординат получим, что
+ , +
/dlsX0d4
1 dt X2 dt
(2)
5
Выражение (2) показывает, что есть две составляющие ЭДС: ЭДС вращения Ев
j соЧЪ, соответствующая вектору 0В, и
X0d4 Х2 dt
Хо
Х2
трансформаторная ЭДС Ет
ЭДС
вращения определяется частотой вращения (о вектора , а трансформаторная ЭДС определяется изменением модуля этого вектора.
Выражение (2) описывает процессы для постоянной частоты вращения системы координат.
В частотно-управляемом электроприводе в динамических режимах это условие нарушается, так как наблюдается скольжение одного вектора относительно другого. С учетом неравномерности вращения системы ко- ордина в выражении (2) появляется дополнительный член j Aft)Lils, характеризующий так называемое динамическое скольжение. Вырах .ение для полной ЭДС Е двигателя может быть представлено в следующем виде:
Е Ет + Ев U - isR - JfflLils
-Li -jAwLiFs. dt
(3)
Чтобы использовать диаграмму (см, фиг. 4) для пояснения переходных режимов, выберем момент времени, когда результирующий век- сс Т°Р Is тока совпадает с действительной осью, направленной по оси фазы А. Величина отрезка АВ, угол АО определяют отставание потокосцепления 4(или отставание вектора ЭДС Еа от вектора ЭДС Ео) и характеризуют скольжение.
В переходных режимах вектор тока начнет ускоряться относительно потокос- цепления и появится дополнительная составляющая скольжения, определяемая последним членом уравнения (3). Учет этой составляющей требует получение производной от угла /, которая упрощенно может быть представлена производной от модуля тока lm, а затем использована для коррекции частотного сигнала изменения задания на преобразователь 16 напряжение-частота и соответственно регулируемых составляющих тока двигателя.
Частотно-управляемый электропривод работает следующим образом.
На входы регуляторов 3 и 4 составляющих токов и на вход преобразователя 16 напряжение-частота подается сигнал задания Da. 8 блоке 5 вычисления задающих переменных из опорных гармонических сигналов по заданным сигналам Da и Uq начинают формироваться гармонические функции задающих переменных, из которых формируются трехфазные управляющие сигналы для силового преобразователя 2 частоты, выходное напряжение которого подается на асинхронный двигатель 1. Фазные токи измеряются датчиками 7 фазных токов и подаются на блок 8 преобразования фазных токов, который осуществляет переход из трехфазной системы координат в двухфазную. Блок 10 определения состазляю- щих напряжения по фазным напряжениям осуществляет переход из трехфазной системы координат в двухфазную. Выходные сигналы блоков 8, 10 и выходной сигнал преобразователя 16 напряжение-частота подаются на блок 9 вычисления текущих переменных, в котором определяются составляющие ЭДС, формирующие обратные связи для регуляторов 3 и 4. Кроме того, блок 9 формирует опорные гармонические сигналы для перехода задающих воздействий от вращающейся системы координат к неподвижной.
Таким образом блок 9.вычисления текущих переменных в соответствии с нагрузкой, параметрами двигателя и величиной задающего сигнала определяет составляющие ЭДС fed и 23q, которые являются сигналами обратных связей регуляторов 3 и 4.
Система регулирования формирует требуемое значение напряжения на выходе силового преобразователя 2 для поддержания на заданном уровне значений составляющих ЭДС.
Для повышения быстродействия в блоке 11 определения модуля тока во вращающейся системе координат при переходе
выходного сигнала q блока 8 преобразования фазных токов через нуль срабатывает блок 18 синхронизации и ключ 17 начинает пропускать последовательность импульсов. В блоке 19 преобразования координат из последовательности импульсов и сигналов id и iq формируется результирующий вектор тока во вращающейся системе координат. Так к«к переход во
0 вращающуюся систему координат происходит тогда,.когда вектор токе совпадает с действительной осью, то на выходе блока 19 преобразований координат появляется сигнал, пропорциональный модулю тока
5 lm, который подается на дифференциатор
20, на выходе которого появляется пронз водная модуля тока, которая в масштабном
усилителе 21 умножается на коэффициент
Li. Коэффициент передачи масштабного
0 усилителя 22 подбирается зкспеоименталь- но.
Таким образом, при набросе нагрузки на выходе дифференциатора 20 появляется сигнал, который через масштабные усилите5 ли 21 и 22 подается на сумматоры 13-15. При набросе нагрузки выходной сигнал сумматоров 13 и 14 уменьшается, что приводит к росту задания (составляющих Ud и Uq) на выходе регупяторов 3 и , Одновре0 менно нг выходе сумматора 15 сигнал увеличивается, что приводит к росту задающей частоты вращения поля двигателя. Одновременное увеличение задающих сигналов на выходе регуляторов 3 и, 4 составляющих
5 токов и задающей частоты силового преобразователя 2 частоты способс-вует уменьшению динамических посадок частоты вращения при нагрузке и расширению диапазона регулирования.
0
ъ
Формула изобретения Частотно-управляемый электропривод по авт. св. Мг 1372581, отличающийся
5 тем, что, с целью улучшений динамических показателей путем повышения быстродействия, в него введены блок определения мс- дуля тока во вращающейся системе координат с частотным и токовым входа0 ми.дифференцирующий блок с двумя выходами и три сумматора, причем частотный вход названного блока определения модуля тока подключен к выходу преобразователя напряжение-частота, а токовый вход - к
5 выходу блока преобразования фазных токов, а выход блока определения модуля тока во вращающейся системе координат подключен ко входу дифференцирующего блока, первый выход которого соединен с первым входом первого сумматора, а второй выход - с первыми входами второго и третьего сумматоров, вторые входы и выходы первого и втор ого сумматоров подключе- ны соответственно к выходам блока вычисления текущих переменных и к входам
регуляторов составляющих тока статора, второй вход и выход третьего сумматора подключены соответственно к выходу блока задания управляющего сигнала и к входу преобразователя напряжение-частота.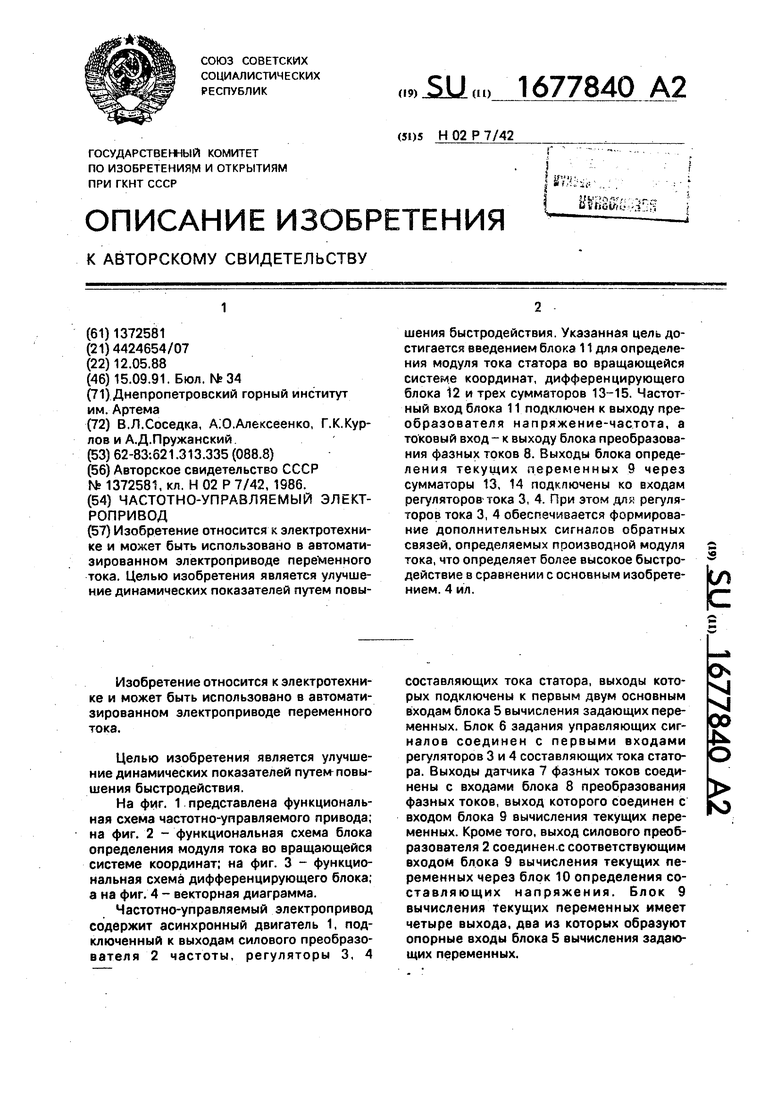
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Частотно-регулируемый электропривод | 1991 |
|
SU1823125A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074394C1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2584142C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе переменного тока. Целью изобретения является улучшение динамических показателей путем повышения быстродействия. Указанная цель достигается введением блока 11 для определения модуля тока статора во вращающейся системе координат, дифференцирующего блока 12 и трех сумматоров 13-15. Частотный вход блока 11 подключен к выходу преобразователя напряжение-частота, а токовый вход- к выходу блока преобразования фазных токов 8. Выходы блока определения текущих переменных 9 через сумматоры 13, 14 подключены ко входам регуляторов тока 3, 4. При этом дл регуляторов тока 3, 4 обеспечивается формирование дополнительных сигналов обратных связей, определяемых пооизводной модуля тока, что определяет более высокое быстродействие в сравнении с основным изобретением. 4 ил. у (5
Фиг.1
П
18
Фиг. 2
4
id
Фиг Л
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
