Известны устройства для определения угловой координаты и величины неуравновешенности ротора на балансировочных машинах с помошью опорного сигнала в виде прямоугольной волны симметричной формы, синхронной И синфазной вращению ротора. Однако трч ность таких устройств недостаточна.
В описываемом устройстве для повышения точности определения угловой координаты неуравновешенности, снижения трудоемкости подготовки ротора к балансировке и упрощения устройства формирующего фазирующие импульсы, применен генератор пилообразного напряжения с очень крутым фронтом, обеспечивающий получение симметричного напряжения прямоугольной формы лишь от одного фазирующего импульса.
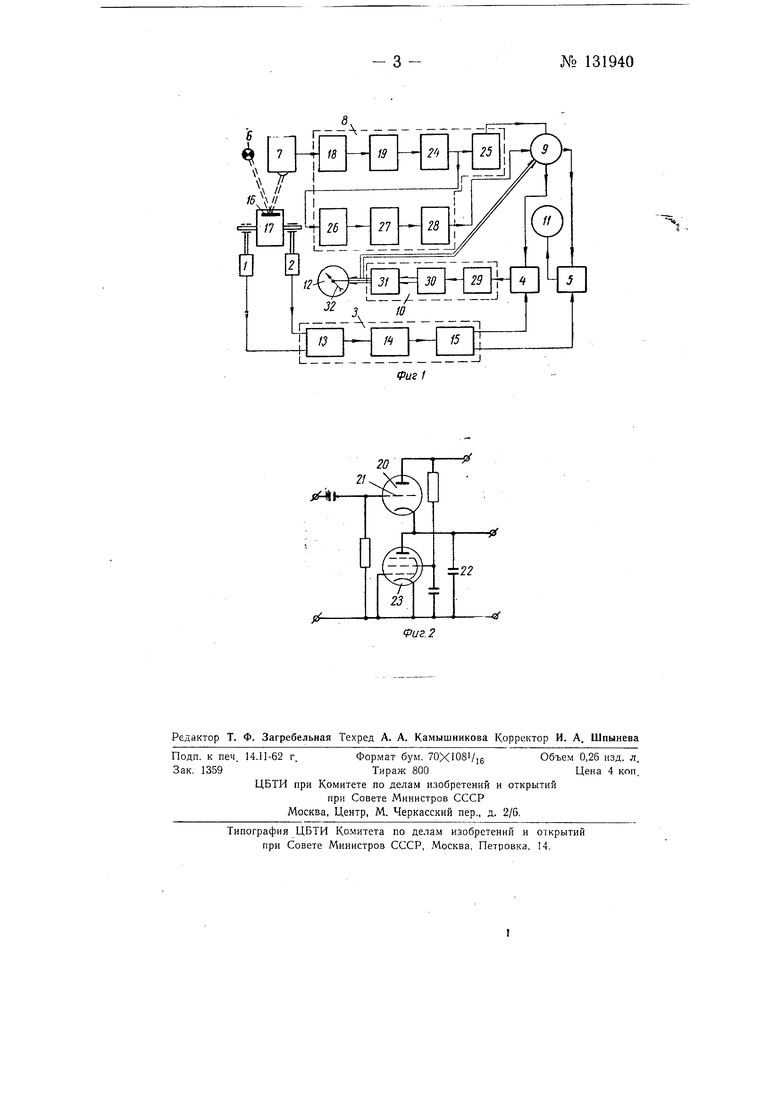
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема генератора пилообразного напряжения.
Устройство для определения угловой координаты и величины неуравновешенности ротора состоит из датчиков / и 2 неуравновешннности, блока 3 усиления сигналов датчиков / и 2, фазовых различителен 4 VI 5, осветителя 6, фотоэлемента 7, блока 8 формирования опорного напряжения, фазовращателя 9, блока 10 отработки фазы .небаланса, стрелочного указателя /7 величины неуравновешенности и стрелочного указателя 12 ее угловой координаты.
Напряжение с датчиков 1 к 2 неуравновешенности поступает на суммирующую схему, 13 блока 3, затем на усилитель 14, имеющий интегрирующий каскад, и через выходной каскад 15 подается на фазовые различители 4 н 5. Луч света, падающий от осветителя 6 на опорною полосу вращающегося уравновешиваемого ротора 17 и отражающийся от нее, поступает на фотоэлемент 7, в результате чего с нагрузки последнего снимается сигнал, имеющий частоту, равную числу обо№: 131940- 2 J л, :..,;
ротов ротора п. 3Tot фазирующий импульс усиливается в усилителе 18 и запускает генератор 19 пилообразного напряжения. В состоянии покоя лампа 20 генератора заперта. С приходом положительного импульса на сетку 21 лампы 20 -последняя отпирается, а конденсатор 22 заряжается через нее. По прохождении импульса лампа 20 снова запирается, а конденсатор 22 разряжается через лампу 23. Точность формирования опорного импульса при этом зависит от соотношения длительности фронта нарастаиия пилообразного напряжения к длительности его спада и увеличивается по мере уменьшения этого соотношения. В свою очередь длительность фронтов пилообразного напряжения зависит от внутреннего сопротивления ламп 20; и 23. Поэтому в качестве дампы 20 применяется .триод с возможно ...меньшим внутренним сопротивлением, а в качестве лампы 25-пентод с боль1аим внутренним сопротивлением. При надлежащем подборе параметров ламп 20 и 23 можно пренебречь длительностью переднёго фронта пилообразного напряжения по сравнению с задним, и это не внесет существенной погрешности в фазу опорного напряжения. Сформированное в генераторе 19 напряжение через ограничитель 24 и выходной каскад 25 поступает, к фазовращателю Я Это же самое напряжени;, с;лвинутое на четверть периода с помощьнэ интегрирующего .каскада 25, через ограничитель27 и выходной каскад 28 также подается на фазоиращатель 9, Таким образом, .с .фазовращателя 9 получается опорное напряжение,фаза которого.зави.сит от угла поворота его ротора. Напряжение с выходных обмоток фазовращателя 5, сдвинутых на 90°, подаетсяна фазовь1е различитеди 4 и 5...,,
Определение угловой координаты неуравновещенности происходит при отработке ротора фазовращателя 9 на соответствующий угол чри помощи блока 10. Реле 29 включает электродвигатель 30, приводящий редуктор 31, на валу которого насажены стрелка 32 указателя 12 и pbVop фазовращателя 5, отработка которого Продолжается до тех пор., пока на выходе- фазового различителя 4 напряжение не будет равно нулю,- Одновременно на выходе фазового различителя 5 напряжение достигает максимальной величины. Определение величины неуравноЬешенности производится при помощи указателя 11, подключенного на выход фазового различителя 5. Описываемое устройство позволяет определять неуравновеш.е«ность роторов, скорость, вращения которйх изменяется в широких пределах, снизить ошибки при определении величины неуравиовешенно,сти и. ее местонахождения, атакже -автоматизировать: процесс, балансировки. -. 5 ; : ,
П р е д м е т и 3 о б р е т е и и я .
Устройство для определения угловой координаты и. величины -неуравновешенности ротора на балансировочных машинах с помощью Опорного сигнала в виде прямоугольной волны симметричной формй-, синхронной и синфазной вращению ротора, о тлич а ю щее с я тем, что, С целью повышения точности определения угловой коорди.наты .неуравновешенности, снижения трудоемкости подготовки ротора к балансировке и упрощения устройстьч, формирующего фазирующие импульсь, применен генератор пилообразного напряжения с очень кру.тым фронтом., обеспечивающий получение симметричного напряжения прямоугольной формы лишь от одногй фазирующего.импульса.. ;.
6 г -I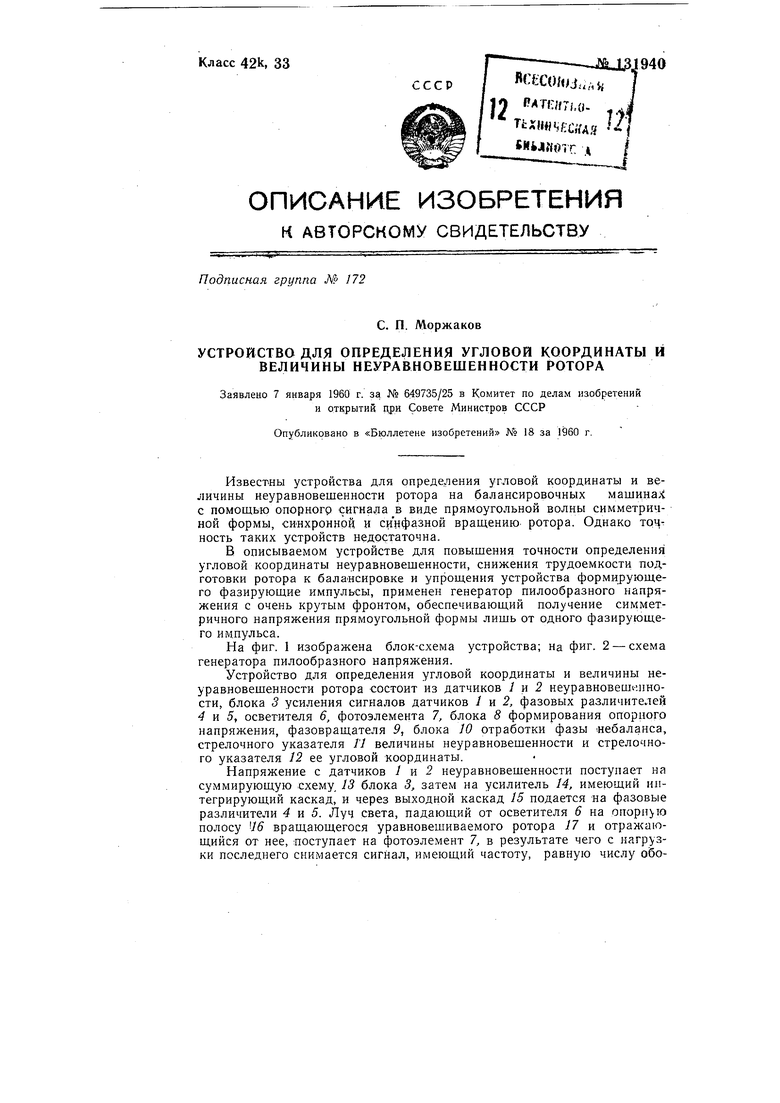
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ БАЛАНСИРОВОЧНОЙМАШИНЫ | 1972 |
|
SU324534A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Устройство для балансировки вращающихся деталей электроискровым способом | 1954 |
|
SU120024A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1983 |
|
SU1193473A1 |
| Измерительное устройство к балансировочному станку | 1975 |
|
SU567980A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УРАВНОВЕШИВАНИЯ РОТОРОВ | 1972 |
|
SU347609A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 1971 |
|
SU299756A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |