11
Изобретение относится к балансировочной технике и может быть использовано в автоматических станках для балансировки коленчатых валов, имеющих корректирующую позицию, работающую в полярной системе координат.
Цель изобретения - повьшение производительности за счет контроля начального дисбаланса в зонах, примыкающих к краю противовеса, и за счет сокращения запрещенных для обрабЬтки коленчатых валов.
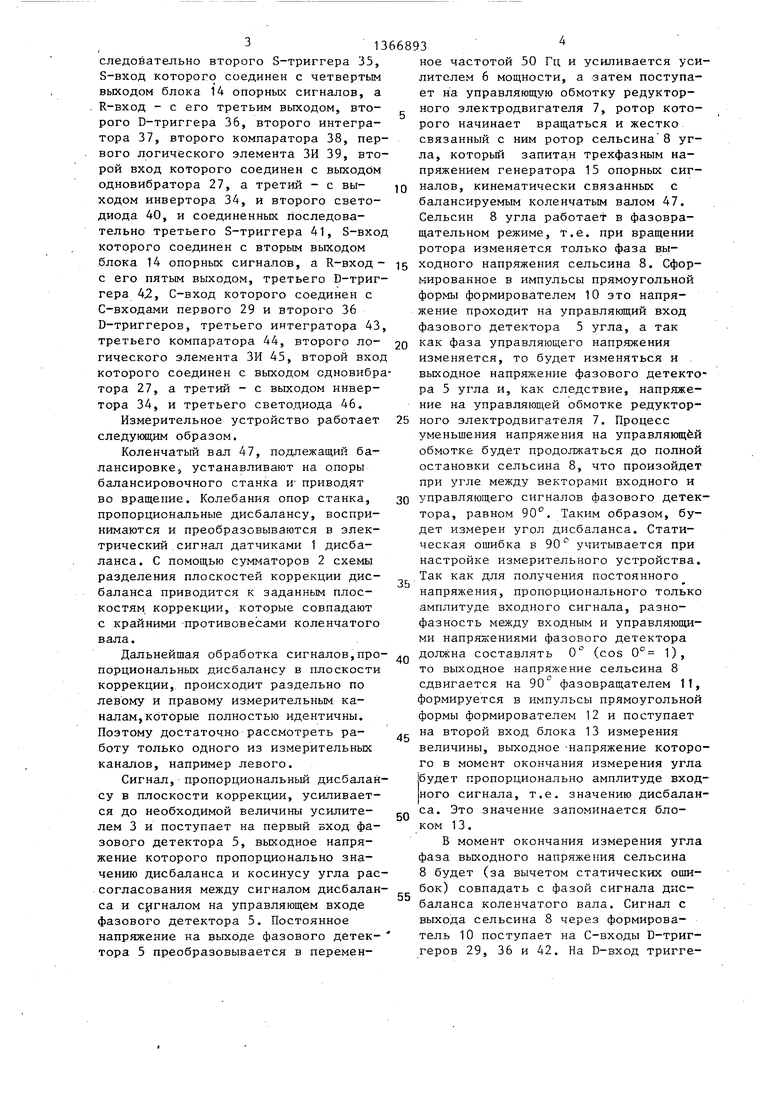
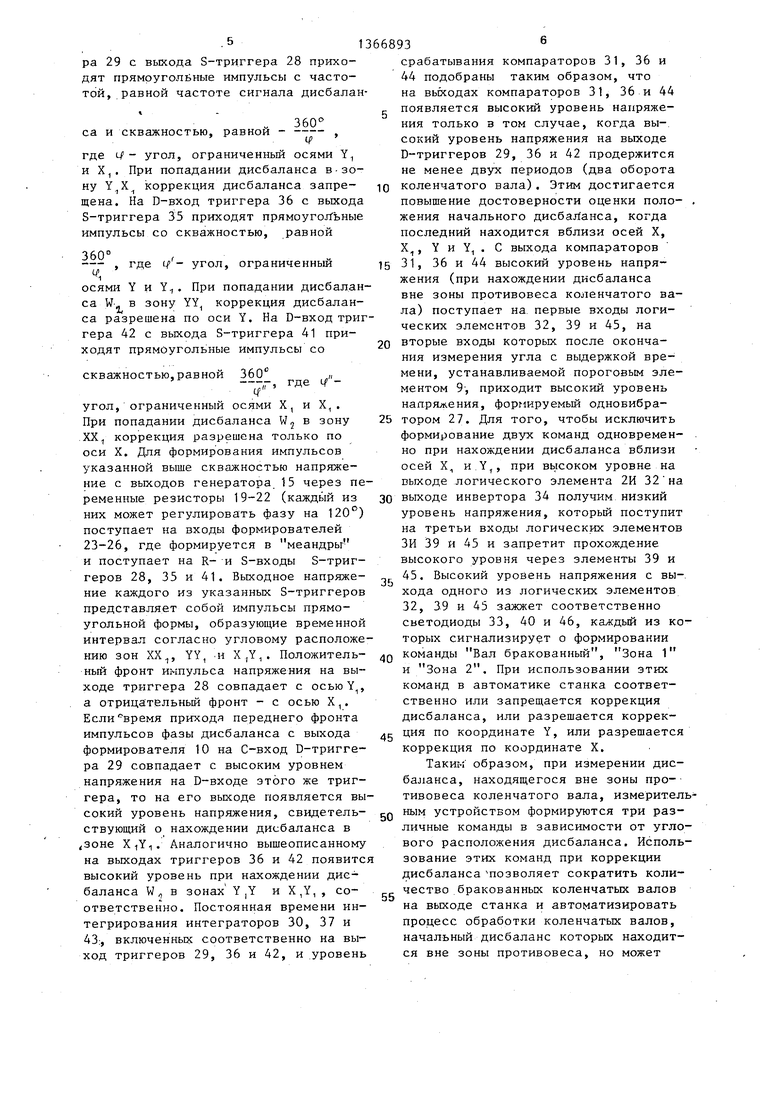
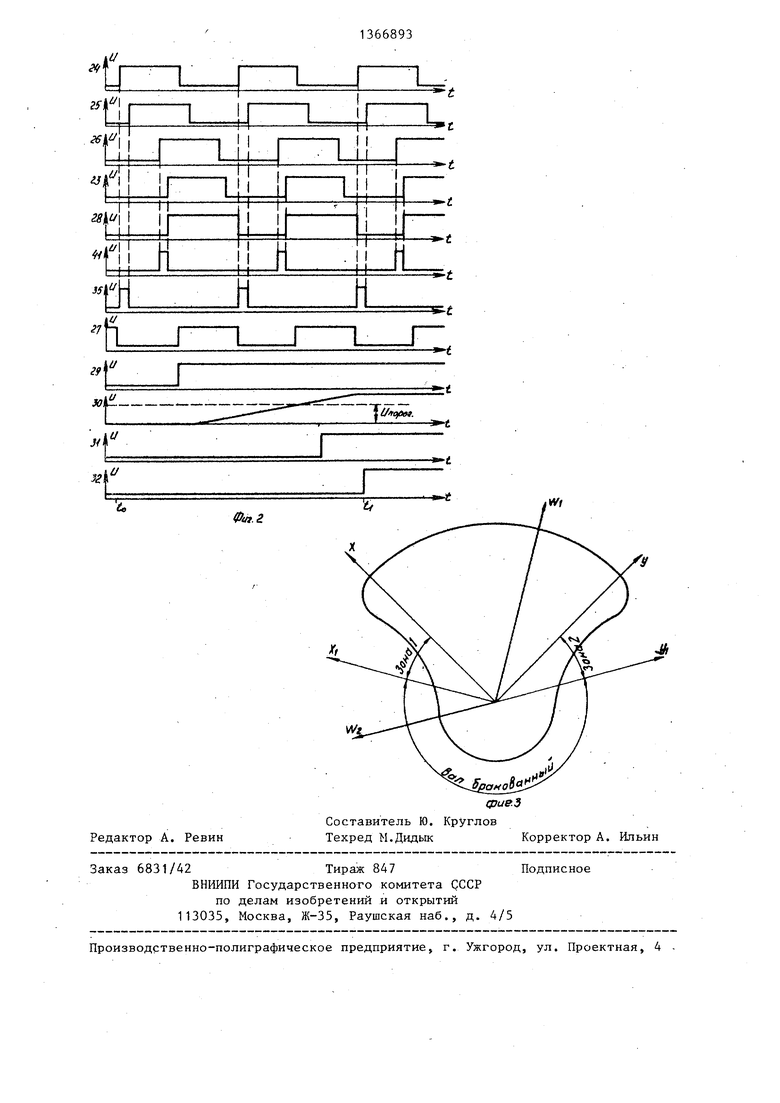
На фиг. 1 изображена структурная схема предлагаемого измерительного устройства; на фиг. 2 - временные диаграммы, поясняющие работу измерительного устройства; на фиг. 3 - векторная диаграмма, нанесенная на контур противовеса коленчатого вала.
На временной диаграмме работы измерительного устройства представлены уровни или форма напряжений на выходах элементов в течение одного цикла измерения. Номера, обозначенные в левой части фиг.2, соответствуют номерам элементов на фиг, 1, Через t обозначено время начала измерения.
Г
0
5
торого является вторым входом блока 4 измерения угла, пороговый элемент
9,вход которого соединен с выходом усилителя 6 мощности, а выход представляет собой первый вход блока 4 измерения угла, первый формирователь 10, вход которого соединен со статорной обмоткой сельсина 8, а выход - со вторым входом фазового детектора 5 и представляет собой второй выход блока 4 измерения угла, фазовращатель 1 1,, вход которого соединен с входом первого формирователя
10,и второй формирователь 12, вход которого соединен с выходом фазовращателя 11, а выход представляет собой третий выход блока 4 измерения угла, блока 13 измерения величины, первый вход которого соединен с выходом усилителя 3, а второй - с тре- Т|Ьим выходом блока 4 измерения угла, блока 14 опорных сигналов, включающего генератор 15 опорных сигналов, выход которого является первым выходом блока 14 опорных сигналов и соединен с вторым входом блока 4 измерения угла, три постоянных резисто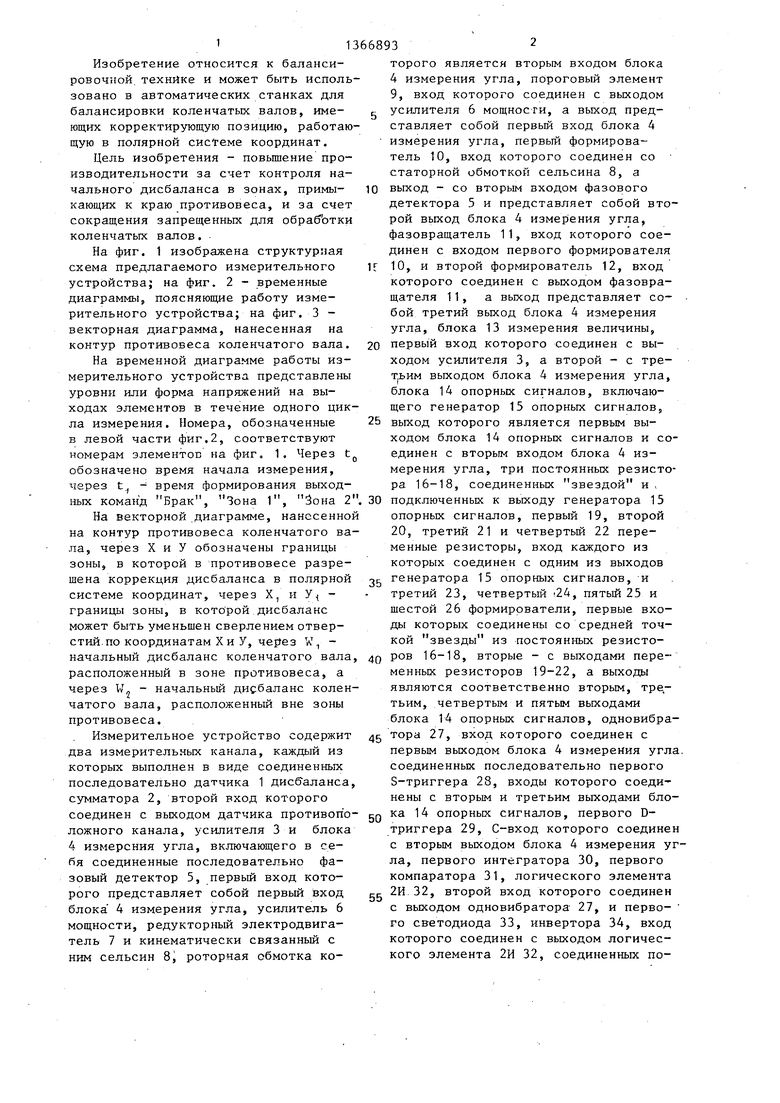
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство станка для балансировки коленчатых валов | 1983 |
|
SU1193473A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1037094A2 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение производительности за счет контроля начального дисбаланса в зонах, примыкающих к краю противовеса. На D-вход триггера 36 с выхода S- триггера 35 приходят прямоугольные импульсы со скважностью 360°/ tf , где угол, ограниченный осями Y и .При попадании дисбаланса в эту зону коррекция разрешена по оси Y. Логические элементы 32, 39 и 45 оценивают ситуацию по характеристикам прямоугольных импульсов, поступающих с выходов компараторов 31, 38, 44 и одновибратора 27, и подают высокие уровни напряжений на соответствующие светодиоды 33, 40 и 46. Для исключения одновременного формирования двух .команд при высоком уровне на выходе логического элемента 2И 32 инвертор 34 формирует низкий уровень, поступающий на третьи входы логических элементов ЗИ 39 и 45.3 ил. S сл « 00 О5 оь 00 ;о 00 фиг.1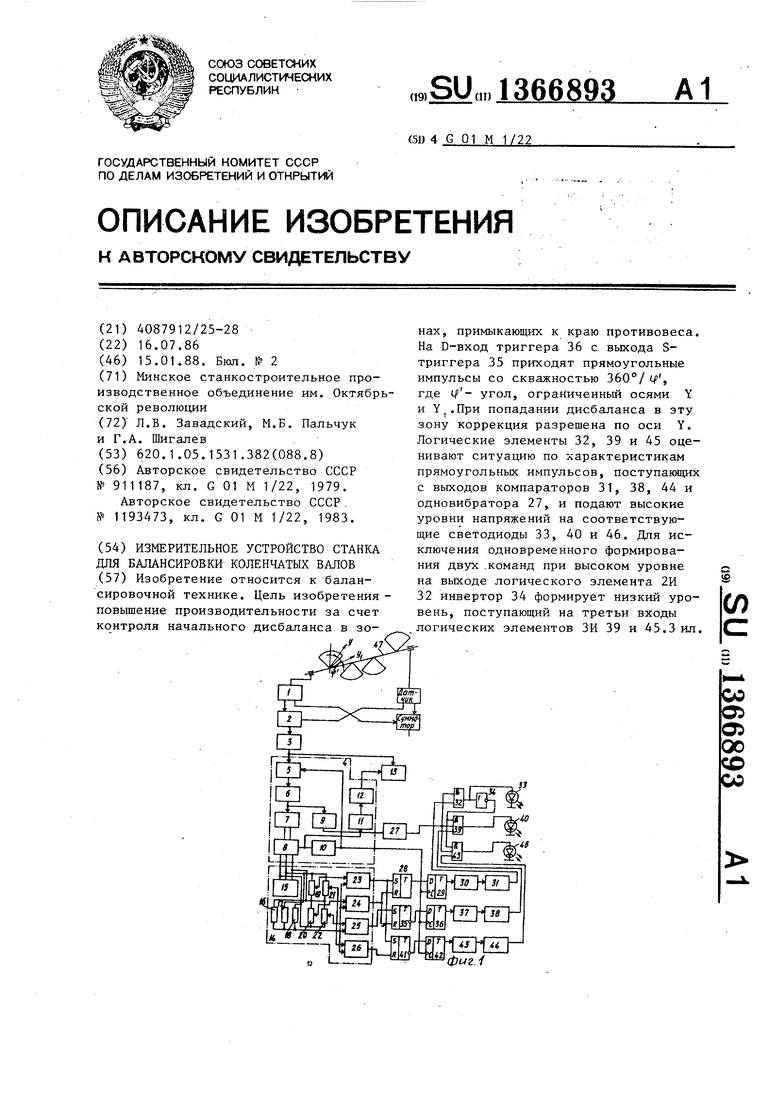
через t - время формирования выходных команд Брак, Зона 1, Зона 2. 30 подключенных к выходу генератора 15
опорных сигналов, первый 19, второй 20, третий 21 и четвертый 22 переменные резисторы, вход каждого из которых соединен с одним из выходов генератора 15 опорных сигналов, и третий 23, четвертый t24, пятый 25 и шестой 26 формирователи, первые входы которых соединены со средней точНа векторной .диаграмме, нанесенной на контур противовеса коленчатого вала, через X и У обозначены границы зоны, в которой в противовесе разрешена коррекция дисбаланса в полярной системе координат, через X, и У - границы зоны, в которой дисбаланс может быть уменьшен сверлением отверстий, по координатам X и У, через V, - кой начальный дисбаланс коленчатого вала, 40 Р°
35
звезды из постоянных резисто- 16-18, вторые - с выходами перерасположенный в зоне противовеса, а через W. - начальный дисбаланс коленчатого вала, расположенный вне зоны противовеса.
Измерительное устройство содержит два измерительных канала, каждый из которых выполнен в виде соединенных последовательно датчика 1 дисб аланса, сумматора 2, второй вход которого соединен с выходом датчика противоп о- ложного канала, усилителя 3 и блока 4 измерения угла, включающего в себя соединенные последовательно фазовый детектор 5, первый вход которого представляет собой первый вход блока 4 измерения угла, усилитель 6 мощности, редукторный электродвигатель 7 и кинематически связанный с ним сельсин 8 роторная обмотка кора 16-18, соединенных звездой и
звезды из постоянных резисто- 16-18, вторые - с выходами переменных резисторов 19-22, а выходы являются соответственно вторым, тре,- тьим, четвертым и пятым выходами блока 14 опорных сигналов, одновибраg, тора 27, вход которого соединен с
первым выходом блока 4 измерения угла, соединенных последовательно первого S-триггера 28, входы которого соединены с вторым и третьим выходами блока 14 опорных сигналов, первого D- триггера 29, С-вход которого соединен с вторым выходом блока 4 измерения угла, первого интегратора 30, первого компаратора 31, логического элемента
g 2И 32, второй вход которого соединен с выходом одновибратора 27, и перво- го светодиода 33, инвертора 34, вход которого соединен с выходом логического элемента 2И 32, соединенных по0
следовательно второго S-триггера 35, S-вход которого соединен с четвертым выходом блока 14 опорных сигналов, а R-вход - с его третьим выходом, второго D-триггера 36, второго интегратора 37, второго компаратора 38, первого логич1еского элемента ЗИ 39, второй вход которого соединен с выходом одновибратора 27, а третий - с выходом инвертора 34, и второго свето- диода 40, и соединенных последовательно третьего S-триггера 41, S-вход которого соединен с вторьм выходом
мированное в импульсы прямоугольной формы формирователем 10 это напряжение проходит на управляющий вход фазового детектора 5 угла, а так как фаза управляющего напряжения изменяется, то будет изменяться и
30
35
блока 14 опорных сигналов, а R-вход- 5 ходного напряжения сельсина 8. Сфор- с его пятым выходом, третьего D-триггера 42, С-вход которого соединен с С-входами первого 29 и второго 36 D-триггеров, третьего интегратора 43, третьего компаратора 44, второго ло- on гического элемента ЗИ 45, второй вход которого соединен с выходом одновибратора 27, а третий - с выходом инвертора 34, и третьего светодиода 46.
Измерительное устройство работает следукмцим образом.
Коленчатый вал 47, подлежащий балансировке, устанавливают на опоры балансировочного станка и приводят во вращение. Колебания опор станка, пропорциональные дисбалансу, воспринимаются и преобразовываются в электрический сигнал датчиками 1 дисбаланса. С помощью сумматоров 2 схемы разделения плоскостей коррекции дисбаланса приводится к заданным плоскостям коррекции, которые совпадают с крайними -противовесами коленчатого вала.
Дальнейшая обработка сигналов,пропорциональных дисбалансу в плоскости коррекции, происходит раздельно по левому и правому измерительным каналам,которые полностью идентичны. Поэтому достаточно рассмотреть работу только одного из измерительных каналов, например левого.
Сигнал, пропорциональный дисбалансу в плоскости коррекции, усиливается до необходимой величины усилителем 3 и поступает на первый вход фа- зово.го детектора 5, выходное напряжение которого пропорционально значению дисбаланса и косинусу угла рассогласования между сигналом дисбаланса и с 1гналом на управляющем входе фазового детектора 5. Постоянное напряжение на выходе фазового детектора 5 преобразовывается в переменвыходное напряжение фазового детектора 5 угла и, как следствие, напряжение на управляющей обмотке редуктор- 25 ного электродвигателя 7. Процесс
уменьшения напряжения на управляющей обмотке будет продолжаться до полной остановки сельсина 8, что произойдет при угле между векторами входного и управляющего сигналов фазового детектора, равном 90. Таким образом, будет измерен угол дисбаланса. Статическая ошибка в 90 учитывается при настройке измерительного устройства. Так как для получения постоянного напряжения, пропорционального только амплитуде входного сигнала, разно- фазность между входным и управляющими напряжениями фазового детектора должна составлять О (cos 0° 1), то выходное напряжение сельсина 8 сдвигается на 90 фазовращателем 11, формируется в импульсы прямоугольной формы формирователем 12 и поступает на второй вход блока 13 измерения величины, выходное -напряжение которого в момент окончания измерения угла будет пропорционально амплитуде входного сигнала, т.е. значению дисбаланса. Это значение запоминается блоком 13.
В момент окончания измерения угла фаза выходного напряжения сельсина 8 будет (за вычетом статических ошибок) совпадать с фазой сигнала дисбаланса коленчатого вала. Сигнал с выхода сельсина 8 через формирователь 10 поступает на С-входы D-триггеров 29, 36 и 42. На D-вход тригге40
45
50
55
ное частотой 50 Гц и усиливается усилителем 6 мощности, а затем поступает на управляющую обмотку редуктор- ного электродвигателя 7, ротор которого начинает вращаться и жестко связанный с ним ротор сельсина 8 угла, который запитан трехфазным напряжением генератора 15 опорных сигналов, кинематически связанных с балансируемым коленчатым валом 47. Сельсин 8 угла работает в фазовра- щательном режиме, т.е. при вращении ротора изменяется только фаза вымированное в импульсы прямоугольной формы формирователем 10 это напряжение проходит на управляющий вход фазового детектора 5 угла, а так как фаза управляющего напряжения изменяется, то будет изменяться и
ходного напряжения сельсина 8. Сфор-
ходного напряжения сельсина 8. Сфор-
выходное напряжение фазового детектора 5 угла и, как следствие, напряжение на управляющей обмотке редуктор- ного электродвигателя 7. Процесс
уменьшения напряжения на управляющей обмотке будет продолжаться до полной остановки сельсина 8, что произойдет при угле между векторами входного и управляющего сигналов фазового детектора, равном 90. Таким образом, будет измерен угол дисбаланса. Статическая ошибка в 90 учитывается при настройке измерительного устройства. Так как для получения постоянного напряжения, пропорционального только амплитуде входного сигнала, разно- фазность между входным и управляющими напряжениями фазового детектора должна составлять О (cos 0° 1), то выходное напряжение сельсина 8 сдвигается на 90 фазовращателем 11, формируется в импульсы прямоугольной формы формирователем 12 и поступает на второй вход блока 13 измерения величины, выходное -напряжение которого в момент окончания измерения угла будет пропорционально амплитуде входного сигнала, т.е. значению дисбаланса. Это значение запоминается блоком 13.
В момент окончания измерения угла фаза выходного напряжения сельсина 8 будет (за вычетом статических ошибок) совпадать с фазой сигнала дисбаланса коленчатого вала. Сигнал с выхода сельсина 8 через формирователь 10 поступает на С-входы D-триггеров 29, 36 и 42. На D-вход тригге
pa 29 с выхода S-триггера 28 приходят прямоугольные импульсы с частотой, равной частоте сигнала дисбалан360равной -
V
са и скважностью,
где If - угол, ограниченный осями Y и X,. При попадании дисбаланса в-зону коррекция дисбаланса запрещена. На D-вход триггера 36 с выхода S-триггера 35 приходят прямоугохГьные импульсы со скважностью, равной
360
.
осями Y и Y,. При попадании дисбаланса W- в зону YY коррекция дисбаланса разрешена по оси Y. На D-вход триггера 42 с выхода S-триггера 41 приходят прямоугольные импульсы со
где Lf - угол, ограниченный
скважностью,равной
360
---, где
- X. .
угол, ограниченный осями л, и При попадании дисбаланса Wj в зону ХХ коррекция разрешена только по оси X. Для формирования импульсов указанной выше скважностью напряжение с вькодов генератора 15 через переменные резисторы 19-22 (каждый из них может регулировать фазу на 120) поступает на входы формирователей 23-26, где формируется в меандры и поступает на R- и 8-входы Б-триг- геров 28, 35 и 41. Выходное напряжение каждого из указанных S-триггеров представляет собой импульсы прямоугольной формы, образующие временной интервал согласно угловому расположению зон ХХ, YY, И X,Y,. Положительный фронт импульса напряжения на выходе триггера 28 совпадает с ocьюY, а отрица:твльный фронт - с осью X,. Если время приходя переднего фронта импульсов фазы дисбаланса с выхода формирователя 10 на С-вход D-тригге- ра 29 совпадает с высоким уровнем напряжения на D-входе этого же триггера, то на его выходе появляется высокий уровень напряжения, свидетельствующий о нахождении дисбаланса в зоне XiYi, Аналогично вышеописанному на выходах триггеров 36 и 42 появитс высокий уровень при нахождении дисбаланса W . в зонах
Y,Y
и X,Y,, соответственно. Постоянная времени интегрирования интеграторов 30, 37 и 43:, включенных соответственно на выход триггеров 29, 36 и 42, и уровень
5
0
срабатывания компараторов 31, 36 и 44 подобраны таким образом, что на вькодах компараторов 31, 36 и 44 появляется высокий уровень напряжения только в том случае, когда высокий уровень напряжения на выходе D-триггеров 29, 36 и 42 продержится не менее двух периодов (два оборота коленчатого вала). Этим достигается повышение достоверности оценки поло- , жения начального дисбаланса, когда последний находится вблизи осей X, Х, Y и Y, . С выхода компараторов
31,36 и 44 высокий уровень напряжения (при нахождении дисбаланса вне зоны противовеса коленчатого вала) поступает на первые входы логических элементов 32, 39 и 45, на вторые входы которых после окончания измерения угла с выдержкой времени, устанавливаемой пороговым элементом 9, приходит высокий уровень напряжения, формируемый одновибра5 тором 27. Для того, чтобы исключить формирование двух команд одновремен- . но при нахождении дисбаланса вблизи осей X, и Y, при высоком уровне на выходе логического элемента 2И 32 на
0 выходе инвертора 34 получим низкий уровень напряжения, который поступит на третьи входы логических элементов ЗИ 39 и 45 и запретит прохождение высокого уровня через элементы 39 и 45. Высокий уровень напряжения с выхода одного из логических элементов
32,39 и 45 зажжет соответственно светодиоды 33, 40 и 46, каждый из которых сигнализирует о формировании команды Вал бракованный, Зона 1
и Зона 2. При использовании этих команд в автоматике станка соответственно или запрещается коррекция дисбаланса, или разрешается коррекция по координате Y, или разрешается коррекция по координате X.
Таким образом, при измерении дисбаланса. Находящегося вне зоны про- тивовеса коленчатого вала, измерительным устройством формируются три различные команды в зависимости от углового расположения дисбаланса. Использование этих команд при коррекции дисбаланса позволяет сократить количество бракованных коленчатых валов на выходе станка и автоматизировать процесс обработки коленчатых валов, начальный дисбаланс которых находится вне зоны противовеса, но может
5
0
5
0
5
быть уменьшен при коррекции дисбаланса по краям противовеса. Это повышает производительность станка.
Формула изобретения
Измерительное устройство станка для .балансировки ,. коленчатых валов, содержащее два измерительных канала, каждый из которых представляет собой последовательно соединенные датчик дисбаланса, сумматор, второй вход которого соединен с выходом датчика дисбаланса другого канала, усилитель и блок измерения угла, выполненный в виде последовательно соединенных фазового детектора, усилителя мощности и редукторного электродвигателя, киг нематически связанного с последним сельсина, соединенного с его статор- ной обмоткой первого формирователя, выход которого соединен с вторым входом фазового детектора, порогового элемента, вход которого соединен с выходом усилителя мощности, и последовательно соединенных фазовращателя вход которого соединен со статорной
обмоткой сельсина, и второго формиро- Q (третий) S-триггер, S-вход которого
соединен с выходом пятого (третьего) формирователя, а R-вход - с выходом четвертого (шестого) формирователя, второй (третий) D-триггер, С-вход которого -соединен с выходом первого формирователя, второй (третий) интегратор, второй (третий) компаратор, первый (второй) логический элемент ЗИ, второй вход которого соединен с
вателя, соединенный с выходом последнего блок измерения величины, второй вход которого соединен с выходом усилителя, блок опорных сигналов, выполненный в виде генератора опорных сигналов, выходы которого соединены с роторной обмоткой сельсина, трех подключенных к выходам генератора опорных сигналов и соединенных звездой
35
резисторов, первого и вто- выходом одновибратора, и второй (трепостоянных
рого переменных резисторов, вход каждого из которых соединен с соответствующим выходом генератора опорных сигналов, и третьего и четвертого формирователей, первые входы которых
45
тий) светодиод, и инвертор, вход которого соединен с выходом логического элемента 2И, а выход - с третьими входами первого и второго логических элементов ЗИ.
соединены со средней точкой звезды , а вторые - соответственно с выходами первого и второго переменных резисторов, одновибратор, вход которого соединен с выходом порогового элемента, и последовательно соединенные S-триг- гер, входы которого соединены с выходами третьего и четвертого формирователей, D-триггер, С-вход которого
соединен с выходом первого формирователя, инвертор, компаратор, логический элемент 2И, второй вход которого соединен с выходом одновибратора, и
светодиод, отличающееся тем, что, с целью повышения производительности, оно снабжено установленными в каждом из измерительных каналов третьим и четвертым переменными резисторами, соединенными параллельно соответственно первому и второму переменным резисторам, пятым и шестым формирователями, первые входы которых соединены с первым входом
третьего формирователя, а вторые - соответственно с выходами третьего и четвертого переменных резисторов, двумя последовательными цепочками, включающими в себя каждая второй
45
тий) светодиод, и инвертор, вход которого соединен с выходом логического элемента 2И, а выход - с третьими входами первого и второго логических элементов ЗИ.
Jft
Фаг. г
Редактор А. Ревин
lOHO
- --
фие.Ъ
Составитель Ю. Круглов
Техред М.Дидык Корректор А. Ильин
| Измерительное устройство к балансировочному станку | 1979 |
|
SU911187A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР | |||
| Измерительное устройство станка для балансировки коленчатых валов | 1983 |
|
SU1193473A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
