113
Изобретение относится к медицинекой диагностической аппаратуре и может быть использовано для визуализации сечений внутренних органов и тканей тела человека с помощью ультразвуковых колебаний.
Цель изобретения - повышение надежности работы.
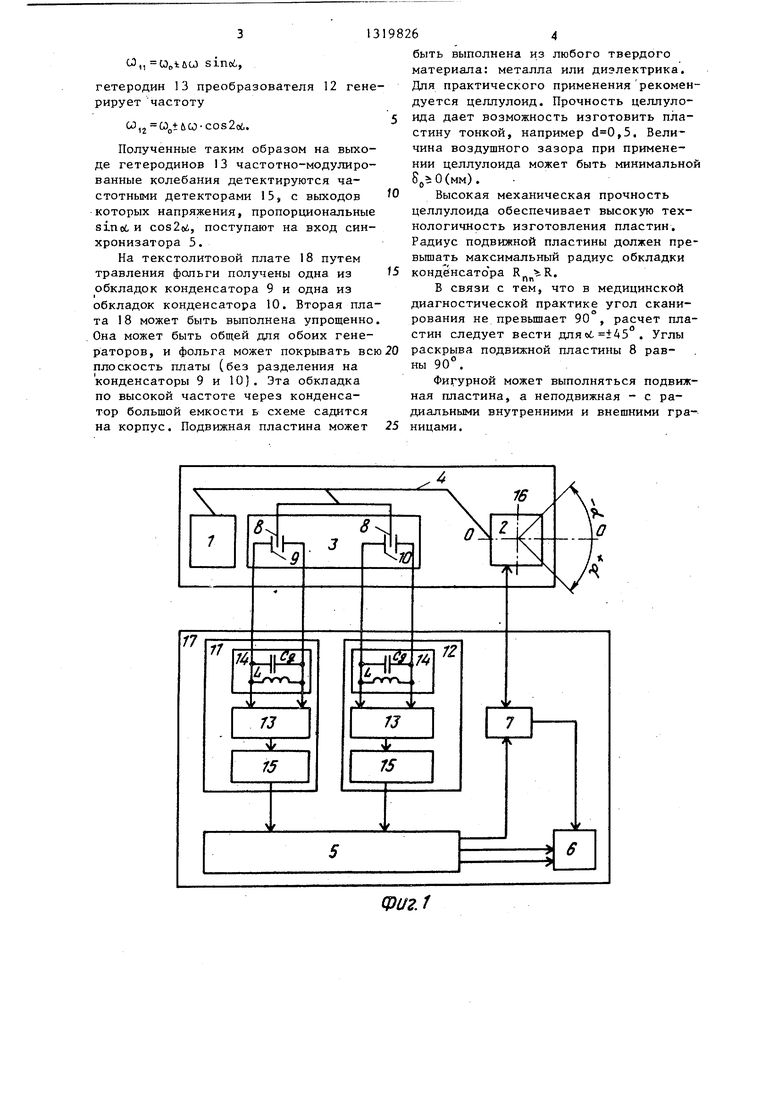
На фиг, 1 изображена принципиальная схема эхоскопа; на фир. 2 - датчик угла.поворота; на фиг, 3 - разрез А-А на фиг, 2 (подвижная обкладка конденсатора переменной емкости датчика угла поворота); на фиг, 4 - неподвижная обкладка конденсатора.
Эхоскоп содержит электродвигатель 1, подвижный ультразвуковой преобразователь 2, синусно-косинусный датчик 3 угла поворота, соединенные между собой кривошипно-шатунным механизмом 4, синхронизатор 5, связанный вьгходами с электронно-лучевой трубкой бис приемопередатчиком 7, Последний соединен приемопередающим входом с ультразвуковым преобразователем 2, Датчик 3 угла поворота состоит из подвижной пластины 8, связанной с кривошипно-щатунным механизмом 4, и двух пар неподвижных фигурных обкладок конденсаторов 9 и 10, Выходы датчика 3 угла поворота подключены к соответствующим входам синхронизатора 5 через преобразователи 11, 12 емкости в напряжение. Преобразователь 11. состоит из гетеродина 13 с частотно-задаюп м контуром 14, в которьй входит индуктивность L и конденсатор Со, и частотного детектора 15, Преобразователь 12 выполнен аналогично. Пределы сектора сканирования ультразвукового преобразователя 2 относительно оси 0-0 равны toi , Элементы схемы 1, 2, 3, 4, 8,9, 10 входят в состав сканера 16, Остальные элементы входят в состав электронного блока 17,
Датчик угла поворота состоит из плат 18 конденсаторов 9, 10, между обкладками которых находится подвижная пластина 8, насаженная на ось кривошипно-шатунного механизма 4, . Расстояние между обкладками конденсаторов обозначено через d, толщина подвижной пластины S, ,
Через центральное отверстие 19 платы проходит ось кривошипно-шатун- ного механизма 4, На фиг. 3 обозначены: Rn - радиус внутренней грани826 2 цы обкладок конденсаторов; R - ис- . ходный радиус, относительно- которого отсчитывается приращение радиуса при расчете формы обкладок конденса, торов; uR - приращение радиуса обкладок конденсаторов. Лучи, ограничивающие углы +о6 и -oi, указывают начальное и конечное положения оси подвижной пластины 8 при сканировании. На
}0 фиг, 4 изображена подвижная пластина 8 с внешним радиусом Rp,
Исходным положением пластины 8 относительно плат 18 считается положение, при котором оси Б-Б плат 18
15 совпадают с осью В-В пластины 8,
Устройство работает следующим образом.
По сигналу, поступающему из синхронизатора 5, в приемопередатчике 7
2Q формируется короткий электроимпульс и поступает на ультразвуковой преобразователь 2, Сформированный преобразователем ультразвуковой импульс излучается в тело пациента и, отра25 зившись от границы раздела структур организма, возвращается на преобразователь 2, После усиления в приемопередатчике 7 сигнал модулирует электронный луч электронно-лучевой трубJQ ки 6 по яркости. Импульс запуска передатчика является одновременно и импульсом запуска генераторов развертывающих напряжений для трубки 6, Расстояние до отражающей структуры определяется по времени прохождения
импульса от преобразователя 2 до места отражения и обратно к преобразователю 2, Для формирования на экране трубки 6 изображения в виде сектора, соответствующего сектору, облучаемому в теле человека ультразвуковыми импульсами, развертывающие напряжения модулируются напряжениями, пропорциональными sin об для вертикальной развертки и cos2o6 для горизонтальной развертки луча трубки, где об - угол поворота ультразвуково- г о преобразователя относительно оси 0-0, I
50 Формирование напряжений sin об и cos2o6 происходит следующим образом. Подвижная пластина 8 при повороте на угол так изменяет емкость конденсаторов 9, 10, чтЬ частоты гетероди55 нов 13, определяемые параметрами контуров 14, изменяются на величины, пропорциональные sin оби cos2o6.
Гетеродин 13 преобразователя 11 генерирует частоту
40
ЬЗ,, Ootu(0 sinoi,
гетеродин 13 преобразователя 12 генерирует частоту
W,2 Оо+ЬСО-008206.
Полученные таким образом на выходе гетеродинов 13 частотно-модулированные колебания детектируются частотными детекторами 15, с выходов которых напряжения, пропорциональные since и cos2ei, поступают на вход синхронизатора 5.
На текстолитовой плате 18 путем травления фольги получены одна из обкладок конденсатора 9 и одна из обкладок конденсатора 10. Вторая плата 18 может быть выполнена упрощенно. Она может быть общей для обоих генераторов, и фольга может покрывать всю плоскость платы (без разделения на конденсаторы 9 и 10). Эта обкладка по высокой частоте через конденсатор большой емкости ь схеме садится на корпус. Подвижная пластина может
98264
быть выполнена из любого твердого материала: металла или диэлектрика. Для практического применения рекомендуется целлулоид. Прочность целлуло5 ида дает возможность изготовить пластину тонкой, например ,5. Величина воздушного зазора при применении целлулоида может быть минимальной
8(5: О (мм).
О Высокая механическая прочность целлулоида обеспечивает высокую технологичность изготовления пластин. Радиус подвижной пластины должен превышать максимальный радиус обкладки
t5 кондёнсато ра .
В связи с тем, что в медицинской диагностической практике угол сканирования не превьш1ает 90 , стин следует вести для об
20 раскрыва подвижной пластины В равны 90°.
Фигурной может выполняться подвижная пластина, а неподвижная - с радиальными внутренними и внешними гра25 ницами.
расчет пла- ±45°. Углы
Фи2.1
ч
w I
tt
/a
-zn. s
nmiMiмнмяi aii
970.
s,;(
a
и
фие. 2
1319826
A-A
иг, 3
В
Составитель Ю.Порецкий Редактор Н.Швыдкая Техред В.Кадар Корректор, А.3имо сосов ,
Заказ 2539/2 Тираж 595 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
--.--1--та ти LJL.J II щ
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фт.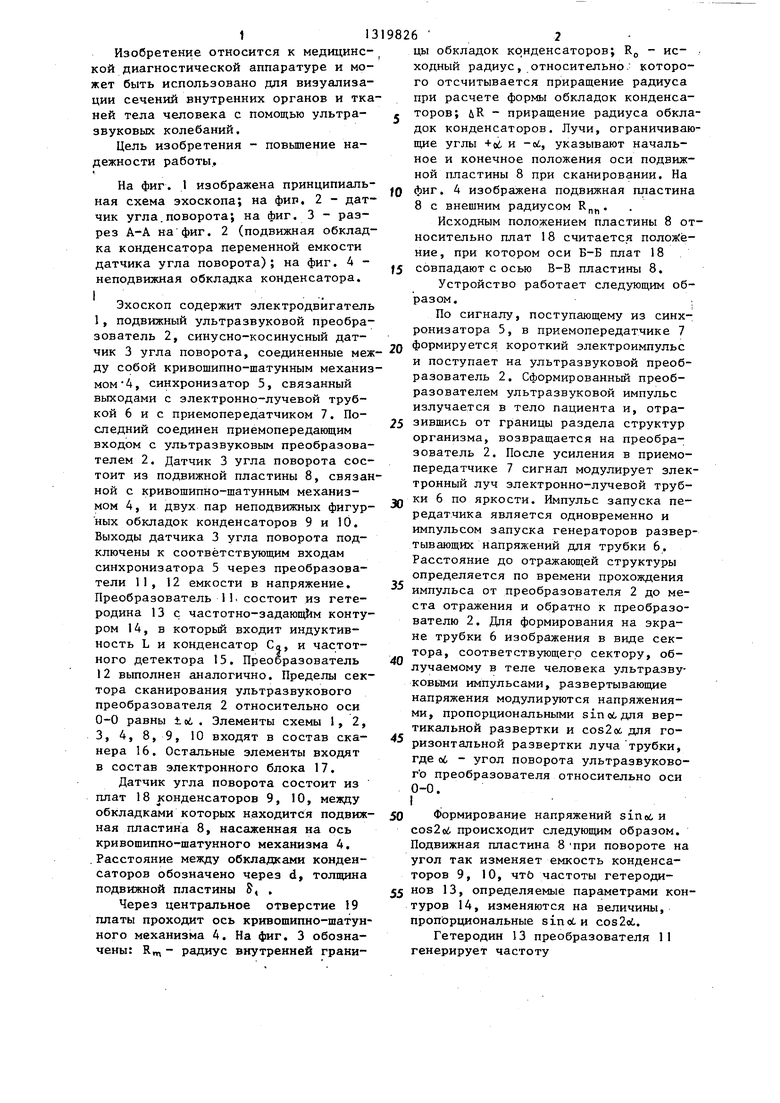
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСКРЕТНЫЙ ЁМКОСТНЫЙ УРОВНЕМЕР | 2023 |
|
RU2808936C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ И СЫПУЧИХ СРЕД В РЕЗЕРВУАРАХ | 2023 |
|
RU2805766C1 |
| ВИХРЕВОЙ РАСХОДОМЕР, ЕМКОСТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК И СПОСОБ ПРЕОБРАЗОВАНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 2004 |
|
RU2279639C2 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Установка для определения коэффициента трения | 2016 |
|
RU2659179C1 |
| ДАТЧИК НУЛЕВОГО ПОЛОЖЕНИЯ | 1973 |
|
SU397743A1 |
| ЭЛЕКТРОННЫЙ УРОВЕНЬ | 1969 |
|
SU256292A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| АВТОМАТИЗИРОВАННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ШТОРМООПОВЕЩЕНИЯ И АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2008 |
|
RU2395819C2 |
| ЕМКОСТНЫЙ РОТАМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2284474C9 |


| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
| Проспект фирмы Алока Компани, Лтд, Япония, 1981. | |||
