Изобретение относится к горному делу и может быть использовано в системах дистанционного и автоматического управления очистными механизированными комплексами и агрегатами.
Целью изобретения является повышение надежности управления за счет обеспечения целостности соединительных элементов.
На фиг. 1 изображена функциональная схема устройства, с помощью которого осуществляют предлагаемый способ; на фиг. 2 и 3 - примеры реализации способа управления базовой балкой в процессе передвижения при различных видах искривления.
Базовая балка комплекса состоит из п секций 1 (1-1 - 1-п), на которых закреплены проушины 2 и 3, шарнирно соединенные между собой соединительными элементами 4 (пальцами).
В соединительных пальцах 4 установлены специальные силоизмерительные датчики 5. Соединительный палец имеет трехточечную схему нагружения, а датчик, расположенный в нем, выдает сигнал о величине нагрузки, воздействующий на палец. Причем датчик выдает сигнал при возникновении критической (предельной для данной конструкции) нагрузки и прекращает выдавать сигнал при снижении нагрузки до допустимой. Разница между величиной предельной и допустимой нагрузки определяется гистерезисом характеристики срабатывания чувствительных элементов и выбирается исходя из конструктивных особенностей базовой балки. Кроме того, сило- измерительный датчик 5 формирует признак вектора приложения силы.
Информация с соединительных пальцев поступает в секционный электронный блок 6 управления откуда по проводной линии 7 связи - в центральный пульт 8 управления, где происходит обработка информации. В центральном пульте 8 управления формируются команды управления, поступающие по той же линии 7 связи в соответствующие электронные блоки и затем по кабелю 9 на электрогидравлические переключатели 10, осуществляющие управление домкратами 11 передвижения за счет коммутации напорной 12 и сливной 13 магистралей. Домкрат передвижения базовой балки при этом взаимодействует с секцией крепи 14.
Способ осуществляют следующим образом.
Исходное положение базовой балки 1 произвольное, ориентация и направление перемещения базовой балкой определяется оператором визуально с помощью известных средств с учетом маркщейдерской информации. При этом предварительно осуществляется отключение части домкратов 11 при необходимости разворота базовой балки. Если этого не требуется, то в
исходном положении все электрогидрорас- пределители домкратов базовой балки включены. После этого в магистраль 12 под давлением подают жидкость от насосной станции и осуществляется фронтальное передвижение базовой балки. Секции крепи 14 находятся в распертом состоянии. По причине разного сопротивления среды, которое воздействует на участки базовой балки
Q по случайному закону, происходит ее искривление. Вследствие этого в соединительных пальцах 4 возникают усилия сжатия Рсж или растяжения Ррас (фиг. 2 и 3), величина и вектор которых зависят от рассогласования движения соседних секций базовой
5 балки.
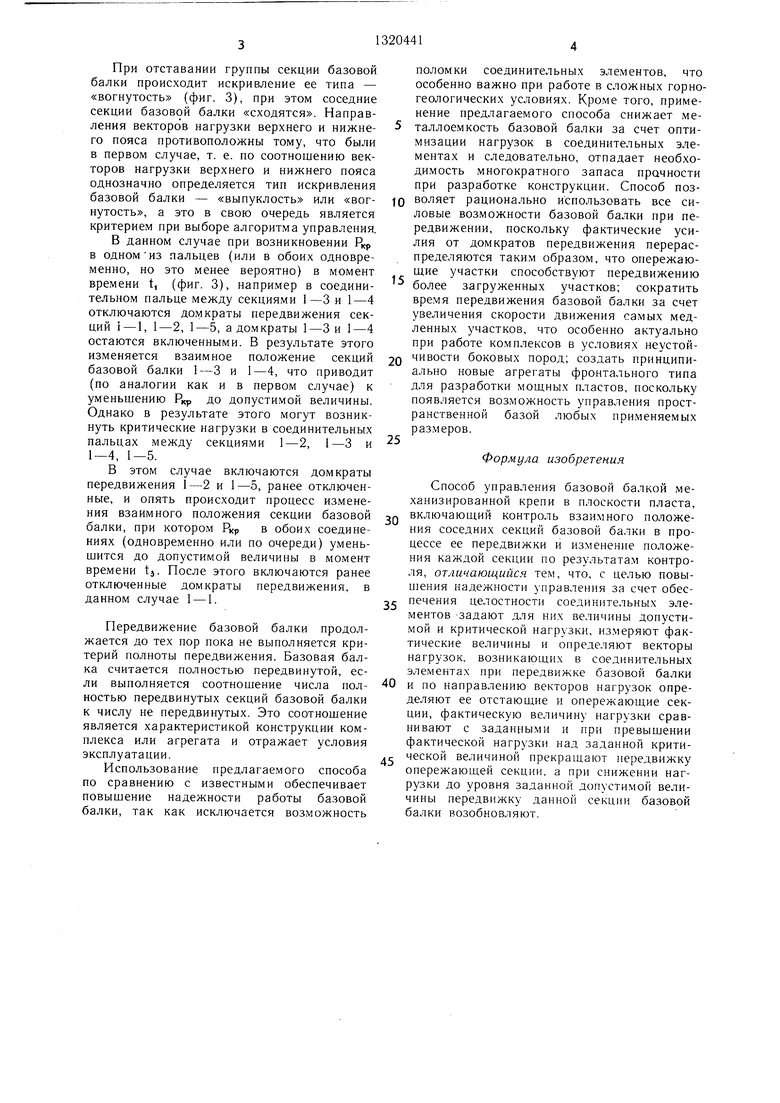
При опережении группы секций базовой балки происходит ее искривление, типа выпуклости (фиг. 2) при этом соседние секции базовой балки «расходятся. Усилия,
Q возникающие в соединительных пальцах, приводят к их изгибу в плоскости пласта в направлениях взаимно противоположных друг другу. При этом направление вектора нагрузки верхнего и нижнего соедицитель- ных пальцев однозначно говорит о том,
5 что эти секции базовой балки опережают соседние. Если нагрузка в каком-либо соединительном пальце достигает предельно допустимой, то формируется сигнал который по кабелю датчика 5 поступает в
электроблок 6 и по системе телемеханики в центральный пульт управления. В соответствии с алгоритмом управления из пульта управления поступает команда в электроблоки и на соответствующие электрогид- рораспределители, отключающие домкраты
с 11 передвижения от напорной магистрали 12.
В момент времени ti (фиг. 2) между секциями базовой балки 1-3 и 1-4 в соединительном пальце возникла критическая (предельная) нагрузка . В этом случае
0 домкраты передвижения секций базовой балки 1-3 и 1-4 отключаются. На фиг. 2 приняты следующие условные обозначения: О - домкрат передвижения секции базовой балки отключен от напорной магистрали,
5 1 - домкрат передвижения подключен к магистрали.
В результате такой коммутации соседние секции базовой балки 1 - 1, 1-2, 1-5 «догоняют опередившие секции 1-3 и 1-4 при этом изменяется взаимное поло0 жение соседних секций базовой балки, это приводит к уменьшению Р, и Рр , что в свою очередь уменьщает нагрузку в соединительных пальцах до допустимой, величина которой меньще Р на величину гистерезиса. Таким образом, в момент времени ti исчезает P, . После этого в момент времени t включают электрогидрораспреде- лители домкратов передвижения на секциях 1-3 и 1-4.
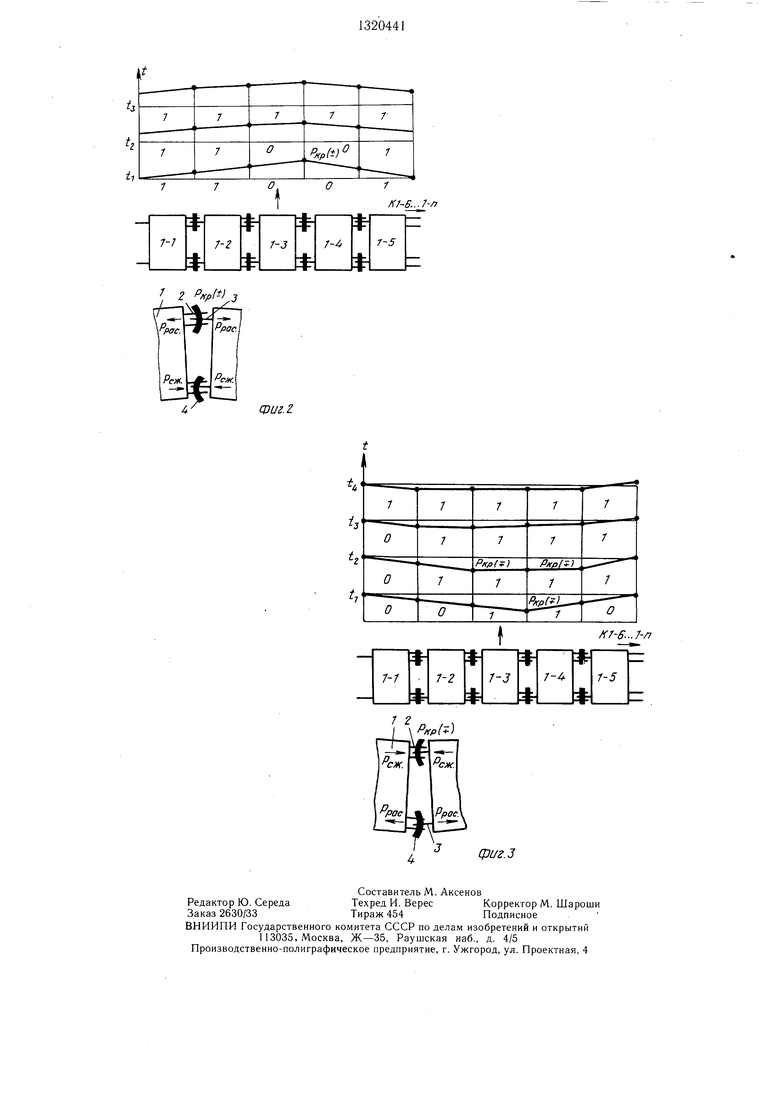
При отставании группы секции базовой балки происходит искривление ее типа - «вогнутость (фиг. 3), при этом соседние секции базовой балки «сходятся. Направления векторов нагрузки верхнего и нижнего пояса противоположны тому, что были в первом случае, т. е. по соотношению векторов нагрузки верхнего и нижнего пояса однозначно определяется тип искривления базовой балки - «выпуклость или «вогнутость, а это в свою очередь является критерием при выборе алгоритма управления.
В данном случае при возникновении R-p в одном из пальцев (или в обоих одновременно, но это менее вероятно) в момент времени t, (фиг. 3), например в соединительном пальце между секциями 1-3 и 1-4 отключаются домкраты передвижения секций 1 - 1, 1-2, 1-5, а домкраты 1-Зи 1-4 остаются включенными. В результате этого изменяется взаимное положение секций базовой балки -3 и 1-4, что приводит (по аналогии как и в перво.м случае) к уменьшению Рцр до допустимой величины. Однако в результате этого могут возникнуть критические нагрузки в соединительных пальцах между секциями 1-2, 1-3 и 1-4, 1-5.
В этом случае включаются домкраты передвижения 1-2 и 1-5, ранее отключенные, и опять происходит процесс изменения взаимного положения секции базовой балки, при котором Ркр в обоих соединениях (одновременно или по очереди) уменьшится до допустимой величины в момент времени tj. После этого вк аючаются ранее отключенные домкраты передвижения, в данном случае 1 - 1.
Передвижение базовой балки продолжается до тех пор пока не выполняется критерий полноты передвижения. Базовая балка считается полностью передвинутой, если выполняется соотношение числа полностью передвинутых секций базовой балки к числу не передвинутых. Это соотношение является характеристикой конструкции комплекса или агрегата и отражает условия эксплуатации.
Использование предлагаемого способа по сравнению с известными обеспечивает повышение надежности работы базовой балки, так как исключается возможность
поломки соединительных эле.ментов, что особенно важно при работе в сложных горногеологических условиях. Кроме того, применение предлагаемого способа снижает металлоемкость базовой балки за счет оптимизации нагрузок в соединительных элементах и следовательно, отпадает необходимость многократного запаса прочности при разработке конструкции. Способ позволяет рационально использовать все силовые возможности базовой балки при передвижении, поскольку фактические усилия от домкратов передвижения перераспределяются таким образом, что опережающие участки способствуют передвижению
более загруженных участков; сократить время передвижения базовой балки за счет увеличения скорости движения самых медленных участков, что особенно актуально при работе ко.мплексов в условиях неустойчивости боковых пород; создать принципиально новые агрегаты фронтального типа для разработки мошных пластов, поскольку появляется возможность управления пространственной базой любых при.меняемых размеров.
Формула изобретения
Способ управления базовой балкой механизированной крепи в плоскости пласта,
включаюший контроль взаимного положения соседних секций базовой балки в процессе ее передвижки и изменение положения каждой секции по результатам контроля, отличающийся тем, что, с целью повышения надежности управления за счет обеспечения целостности соединительных элементов -задают для них величины допустимой и критической нагрузки, измеряют фактические величины и определяют векторы нагрузок, возникающих в соединительных элементах при передвижке базовой балки
и по направлению векторов нагрузок определяют ее отстающие и опережающие секции, фактическую величину нагрузки сравнивают с заданными и при превышении фактической нагрузки над заданной критической величиной прекращают передвижку опережающей секции, а при снижении нагрузки до уровня заданной допустимой величины передвижку данной секции базовой балки возобновляют.
/r/-.../-/7
{ 2
PciK. -f- 1.
urtfld
(PUZ.Z
КГ-6:.-П
(pi/г.З
Составитель М. Аксенов
Редактор Ю. СередаТехред И. ВересКорректор М. Шароши
Заказ 2630/33Тираж 454Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированная крепь | 1988 |
|
SU1765443A1 |
| Прицепное устройство базовой балки механизированной крепи | 1988 |
|
SU1610038A1 |
| Механизированная крепь | 1988 |
|
SU1661440A1 |
| Механизированная крепь | 1981 |
|
SU1105655A1 |
| Механизированная крепь для выемки угля с закладкой выработанного пространства | 1977 |
|
SU693028A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Механизированная крепь | 1982 |
|
SU1071759A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2006 |
|
RU2324820C1 |
| Выемочный комплекс для крутых пластов | 1980 |
|
SU1021787A1 |
| Устройство для обеспечения прямолинейности базы крепи | 1977 |
|
SU735795A1 |
изобретение предназначено для дистанционного и автоматического управления очистными механизированными комплексами и агрегатами. Цель изобретения - повышение надежности управления за счет обеспечения целостности соединительных элементов (СЭ) 4. В процессе передвижки базовой балки (ББ) механизированной крепи в плоскости пласта контролируют взаимное положение ее соседних секций 1. Для СЭ 4 секций 1 задают величины допустимой и критической нагрузки, измеряют фактические величины и определяют сило- измерительными датчиками 5 векторы нагрузок, возникающих в СЭ 4. По направлению векторов нагрузок определяют отстаю- ш,ие и опережающие секции. Фактическую величину нагрузки сравнивают с заданными. При превышении фактической нагрузкой заданной критической величины прекращают передвижку опережающей секции. При снижении нагрузки до уровня заданной допустимой величины передвижку данной секции возобновляют. Передвижение ББ продолжается до тех пор, пока не выполнится критерий полноты передвижения. Если выполняется соотношение числа полностью передвинутых секций ББ к числу непередвинутых, ББ считается полностью передвинутой. Это соотношение является характеристикой конструкции комплекса или агрегата и отражает условия эксплуатации. 3 ил. О) со ГчЭ о 4: 
| Способ управления перемещением базовой балки очистного агрегата циклического действия и устройство для его осуществления | 1980 |
|
SU911031A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Патент Великобритании № 1047094, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
