39
печиваться механизмом задающего устройства, выполненного в виде линейного гидравлического дозатора 2.
0 1нако при каждой передвижке возникает погрешность (недодвижка или передвижка за расчетное значение), связанная, с неточностью дозировки.
Устройство для осуществления этого способа включает секции базовой балки, связанные с секциями крепи, гидростойки распора базы, гидропереключ тели, связанные через управляемые обратные клапаны с гидроцилиндрами перемещения, задающие элементы, выполненные в виде линейных гидравлических дозаторов с ограничителями величины перемещения, датчик, связанный с базовой балкой механизмом гидрозахвата, имеющим цилиндр с подпружиненным поршнем, через который перпендикулярно оси цилиид а пропущены скалка и неподвижная направляющая, закрепленная на секции базовой балки и звено жесткой обратной связи, соединенное с цилиндром механизма гидрозахвата, установленным в направляющих на секции базовой балки и имеющим на одном плече магнит для взаимодействия с датчином,а на другом паз для взаимодействия с гидропереключателем, закрепленным на секции базы, при этом крепь имеет пассивные секции, на каждой из которых установлен линейный гидравлический дозатор, выполненный в виде гидроцилиндра, шток которого шарнирно связан со скалкой механизма гидрозахвата| 2 1
Недостатком данного устройства является невозможность автоматически ликвидировать нелинейность базы путем изменения шага последующей передвижки.
Цель изобретения - обеспечение прямолинейности путем автоматической компенсации имеющихся искривлений базы.
Поставленная цель достигается тем что согласно способу управления перемещением базовой балки омистнога агрегата циклического действия определяют знак угла рассогласования смежных линейных прогонов базы и для положительных углов уменьшают, а для отрицательных увеличивают очередной шаг передвижки соответствующей секции крепи.
С этой целью устройство для управления перемещением базовой балки
314
очистного агрегата циклического действия снабжено установленными на концах смежных линейных прогонов базы датчиками знака угла рассогласования J прогонов и автоматическими корректорами задания шага передвижки, выполненными в виде сообщакхцегося с поршневой полостью дозатора гидравлического цилиндра, внутри которого разo мещен плавающий гидрозолотник с кольцевой выточкой, причем датчики знака угла рассогласования прогонов выполнены в виде двухлинейного гидропереключателя, выходы которого соеs динены с входными отверстиями гидравлического цилиндра знака угла.
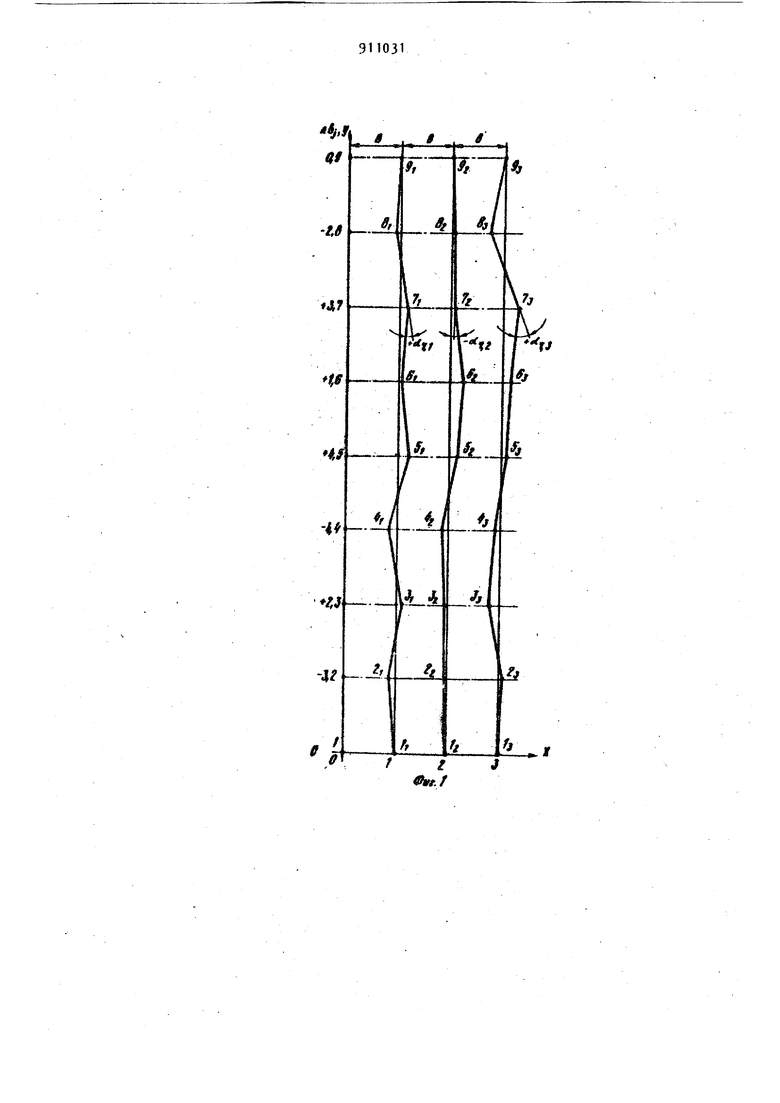
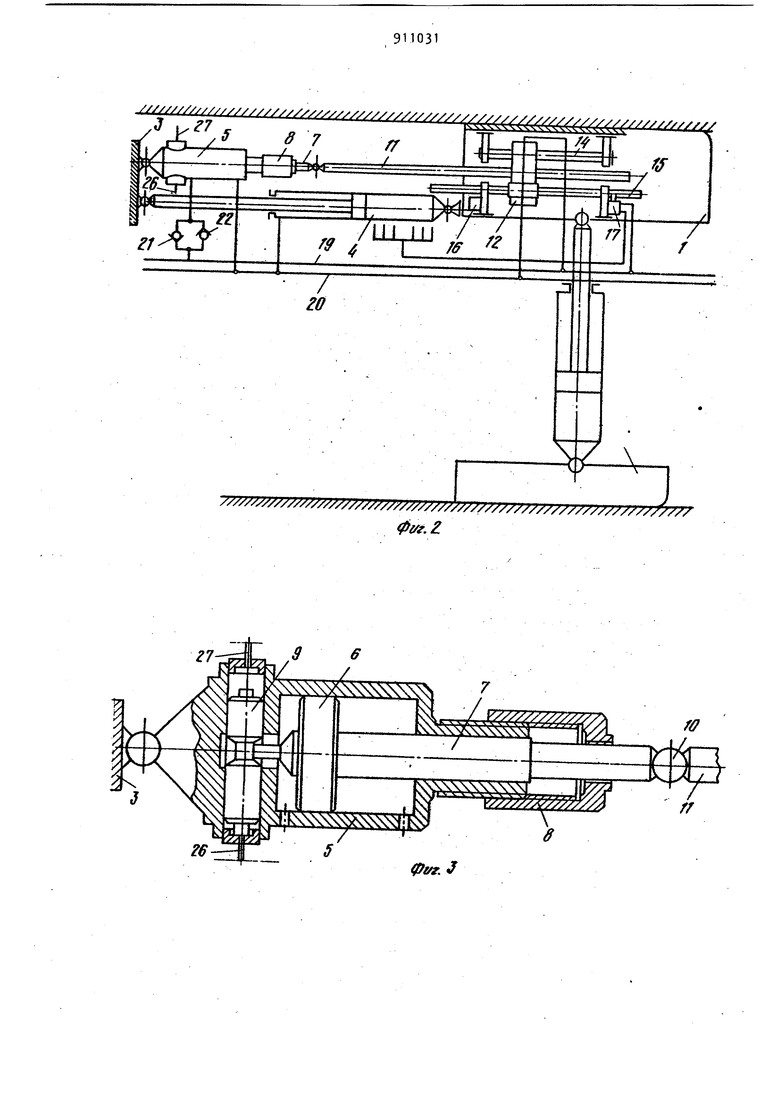
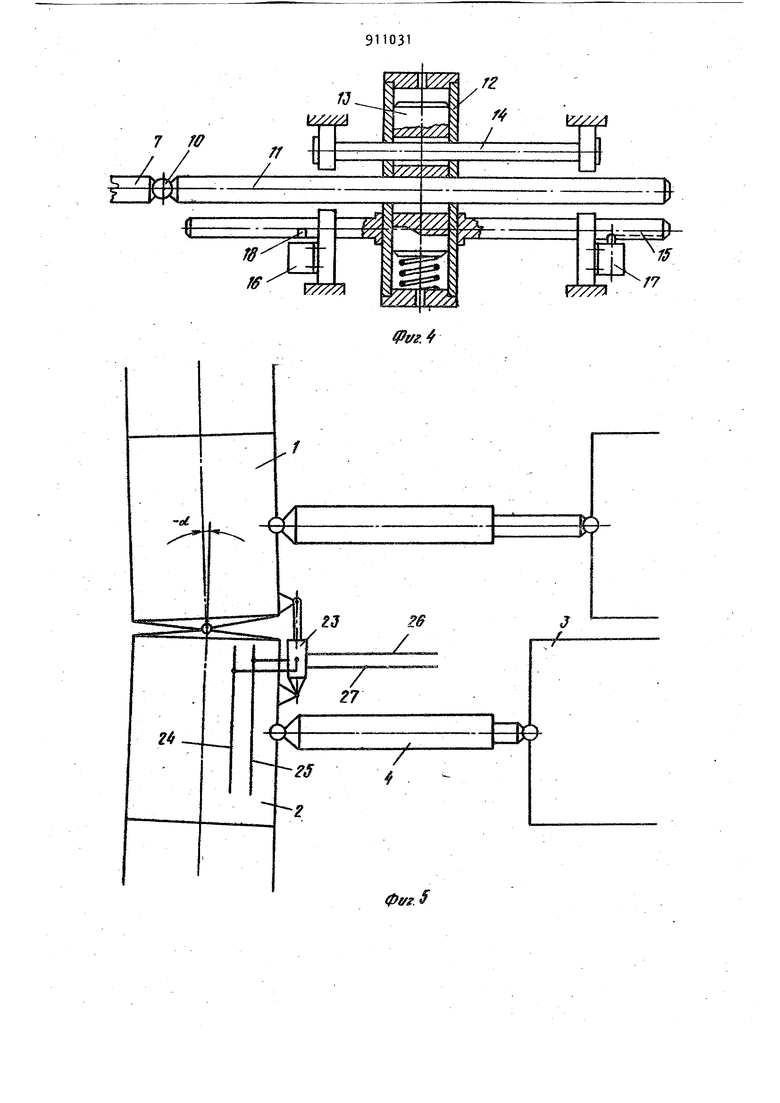
Нд фиг.1 изображена функциональная схема системы управления агрегатом; на фиг. 2 - конструктивная схе0 ма устройств системы управления, общий вид; на фиг. 3 - линейный гидравлический дозатор, общий вид в разрезе ; на фиг. k - механизм гидрозахвата, общий вид в разрез; на фиг. 5
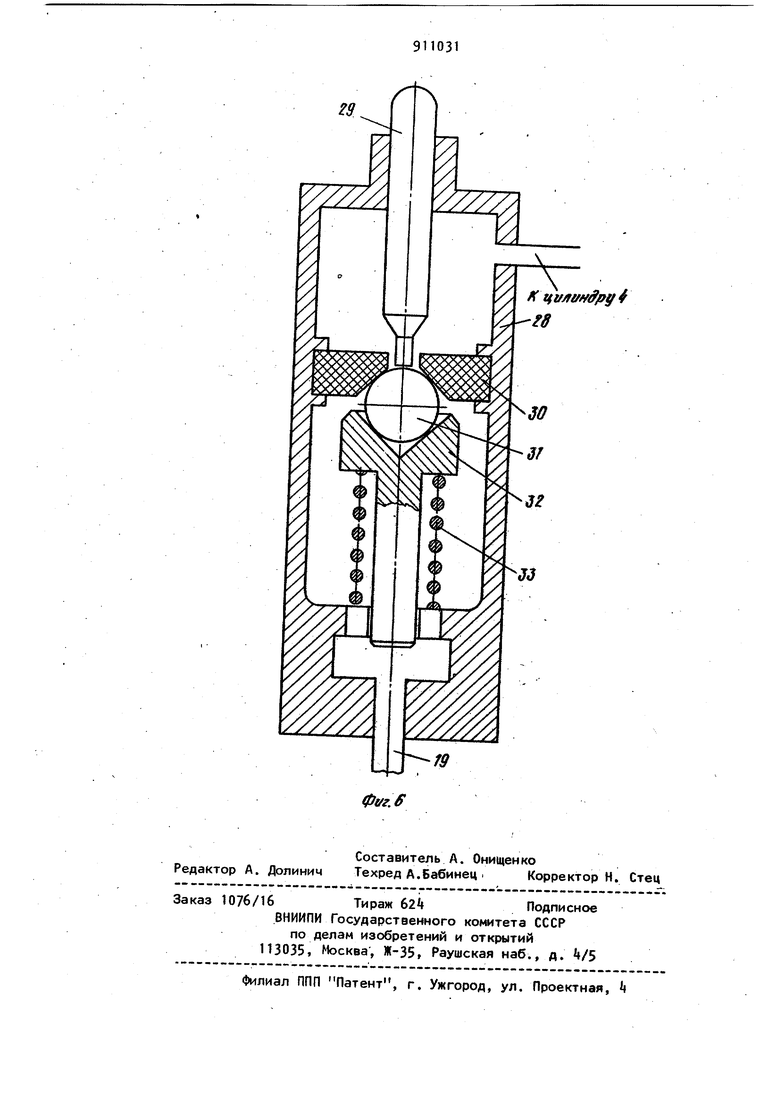
5 расположение на базе измерительного элемента угла рассогласования, общий вид; на фиг. 6 - конструкция гидропереключателя .
В схеме (фиг.1) по оси у цифрами отмечены номера контролируемых точек базы, состоящей из восьми жестких линейных прогонов, а по оси х - номера циклов. Кроме того, для каждой контролируемой точки (левее ее номе ра) выставлены действительные суммарные погрешности (в мл) механизма задающего устройства, масштабы в данном случае выбраны условно. Положения базы после выполнения первого, второго и третьего циклов соответствуют в принятом масштабе порядку отработки задания на передвижку при условии, что крайние контролируемые точки базы точно отрабатывают расчетный
шаг передвижки В, и что величина ДЬ| + 5 мм, определяемая как
к - - -5-
где bj - конструктивная величина
поправки задающего устройства, одинаковая для всех механизмов системы; D - диаметр гидрозолотника
механизма коррекции; 5 d - диаметр шейки гидрозолотника механизма коррекции. Поскольку фактическое задание программы передвижки для каждой контролируемой точки отличается от расчетного значения В, то Б Б.- + (±ДЬу), где Bj фактическая величина задания шага передвижки данной контролируемой точки; истинное значение погрешнос ти задания данной контролируемой точки. Поэтому полное задание на переД и ку очередного цикла для каждой контролируемой точки можно представить условием А. ГВ + (±ЛЬр - (±ДВу Д )J это и есть обобщенное представление данного способа управления перемещением базовой балки очистного агрега та циклического деиствия.. Погрешность iЛ Bj, i не может вли ять на процесс накапливания нс1фивления базы, поэтому условие прямолиHeftHoctH базы должно подчиняться tpe бованию ,« (±ЛЦ) « V (±ДЬа) + (t/lN) ,..., С1ЛЬи) но поскольку истинные значения BJ и 4bj неизвестны постольку ошибку искривления базы можно отрабатъюать по знаку угла рассогласования линейных tiporoHOB базы, варьируя попра&ку к заданию величиной , которую определяют расчетным путем при проектировании регулятора. На этом основании полное задание на передвиж ку очередного цикла для каждой контролируегюй точки представим в де А ГВ| + ал Ь ) - (± А.В.- ,i)j. Компенсацию погрешности задания t.b на передвижку базы по npe irtaraeмому способу рассмотрим (фиг 1) для седьмой контролируек(ой точки. Так как величина ЛЬ7 3 Смм) поэтому первый цикл седьмой точки отрабатывается с погрешностью 4-3 мм относительно В. Угол с положителен поэтому второй цикл отрабатываетсЯ :с погрешностью 3 + 3 - 5 +1 и т.д. Аналогичным образом отрабатываются погрешности механизмов задающих устройств и всех остальных контролируемых точек за исключением крайних, перемещение которых принимается как эталонное. Поэтому крайние контролируемые точки системы принимаются как базисные, прямая между которыми характеризует проектную линию прямолинейности , относительно которой и . прО1:13водится стабилизация базовой балки. Истинные величины перемещения крайних контролируемых точек за цикл также отличаются от расчетных на величину соответствующих погрешностей механизмов задающих устройств, что Приводит к отстаиванию или gnepeжёнию их относительно друг друга. В конечном итоге это может привести к некоторому р1азвороту Агрегата в плаг не. Компенсация oitM6te4 разворота или наоборот намеренный ввод зэда- . мия на разворот системы производится путем соответст ющего изменения уставок задания в механизме линейного стружки (см. фиг. 3). Устройство (фиг. 2-6) содержит жестю1е дикейные гнюгоны базовс балю1 I и 2, крепи 3 домкраты лередв шки базово балки 4. В качестве задаю11( элемента толщины стружки в нем применен линейн гидрааямческий дозатор, устаг новленн{|(й на Пассивной секции крепи, шток itoToporo посредством скалки соедашен с механизм 1 гидрозахвата системы шагания. Шнейный гидравлический дозатор состоит из цилиндра 5« поршня 6 штока 7, втулки регулировH t толщины стружки 8 и управляемого плаваЮ{це о гидрозолотника 9 с кольцевой проточкой. Шток гмнейного дозатора при помощи шарнира 10 соединен со скадкой 1, которая проходит через цмлиндр 12 и подпружиненный Поршень t3 механизма гидрозахвата. 8 комплект механиэиа гидрозахвата ; ходит также неподвижная направляющая 14, которая также гроходит через цилиндр и поршень механизма гидрозахвата и неподв(жно закреплена на базовОй балке; он вкпючает в себя также звено жесткой обратной связи 15 с кольцом по , с помощью которого оно надето на цилиндр гидрозахвата. Плечи звена жесткой обратной связи свободно проходят через фиксированные направляющие, установленMiie на базе. На левой направляющей установлен магнитоуправляемый датчик 16 контроля исполнения команд, а на правой - гидропереключатель 17 (управляющий элемент регулятора). В соответствии с местом установки датчика и гидропереключателя на одном плече звена жесткой обратной связи установ лен (вмонтирован в него) постоянный магнит 18, а на другом - выбран паз, с помощью которого производится вклю чение и выключение гидропереключателя. Устройство содержит также две гидромагистрали 19 и 20 и два обратHbtx клапана 21 и 22. В качестве изме рительного элемента угла рассогласования линейных прогонов базы примене двухлинейный гидропереключатель 23. Кроме того, устройство содержит вспо могательные гидромагистрали 2k-27, Гидропереключатель 17 (см. фиг. 6 состоит из корпуса 28, нажимного шти та или толкателя 29, седла 30,. впрес сованного в корпус, шарика 31, подпружиненного сухаря 32, прижимакнцего пружиной 33 шарик к седлу. Гидропере ключатель является однолинейным клапаном, имею11{им два входа: один ,со стороны подпружиненного сухаря, к ко торому подсоединена гидромагистраль 19, а другой - со стороны толкателя 29, подсоединенного к группе гидроци линдров передвижения 4 данной контролируемой точки. Устройство работает следующим образом. В исходном положении перед заданием программы передвижки посаиень 6 линейного дозатора занимает крайнее левое положение, гидроперекпючатель 17 в этот момент закрыт, а по{щ)ень 13 механизма, гидрозахвата подасат в верхнее положение и зафиксирован относительно неподвижной напраеляющей И. Обратный клапан 21 нормально зарегулирован на 0-50 ат. при рабочем давления гидросистемы 18020Q ат. I... ..: Ввод задания на передвижку и собственно передвижка базовой 6ал)о осуществпяетсй ли станционно оператором путем подачи рабочего дааленкя в магистраль 19 и одновременного переключения на слив магистраяи2б. В результате поршень 13 механизма гидрозахвата опускается вниз прежде чем откроется клапан 21. Яри этом ци/)индр механизма гидрозахвата освобождается относительно направляйощей И и зафиксируется относительно скалки 11 (фиг. if). При достижении в магистрали 19 давления 0-50 ат, открывается обратный клапан 21 и поршень 6 дозатора, а вместе с ним и цилиндр 12 механизма гидрозахвата перемещается вправо до упора поршня 6 во втулку 8, т.е. на величину задания толщины стружки, В результате этого звено жесткой обратной связи 15 открывает гидропереключатель 17 и во все цилиндры домкратов передвижки данной контролируемой точки подается рабочее давление .. Аналогичные операции независимо друг от друга происходят и во всех группах управления базой. Начинается хаотическое (несинхронное) перемещение участков базовой балки, при котором все механизмы гидрозахвата неподвижны в пространстве. Ка)кдая контролируемая точка базовой балки двигается .-до тех пор, пока соответствующее звено жесткой обратной связи не выключит гидропереключатёль и не происходит отсечка подачи рабочей жидкости в цилиндры домкратов передвижки. Если данная контролируемая точка полностью перемещается на величину задания, то магнит 18 сов мещается с магнитоуправляемым датчиKCfM 16 и на табло оператора зафиксируется окончание рабочего цикла данной контролируемой точки. В противном случае за(5лксируется аварийная ситуация и оператор должен принимать меры по ее ликвидации. солвтно точно отработать заданный шаг передвижки невозможно, поэтому понятие полностью переместиться на величину задания следует лонимать условно. Заданный передвижки считается отработанным, если в момент отключения гидросисте fe а зоне допустимого отклонения находятся все контролируемые точки базы. После очередного прохода струга cMcTdVja задания программы вновь приводитс в исходное положение. Для этого магистраль 19 переключают на слив, а в магистраль 20 кратковременно подают давление до 10-15 ат. В момент переключения гидросистемы поршень 13 механизма гидрозавата фиксируется относительно направляющей Н, а скалка 11 освобождается и вместе с поршнем 6 дозатора перемещается, влево до упора хвостовика поршня 6 в гидрозолотНик 9. Положение гидро1золотника 9 внизу или вверху (фиг.З)
устанавлиэается автоматически по окончании цикла передвих(ки и зависит только от знака угла сбСфиг, 5).Очередное задание программы производят аналогичным образом.
После того, как поршень домкрата передвижки полностью выдвинется, производят подтягивание секции крепи для чего снижают давление распора гидростойки крепи, а в магистраль 20 подают рабочее давление при включенной на слив магистрали 19 и т.д.
Данные способ и устройство для .его осуществления полностью исключаю прЬгрессивное накопление искривления базы за счет неточности дозировки толщины стружки.
Формула изобретения
1. Способ управления.перемещением базовой балки очистного агрегата циклического действия, основанный на поочередной передвижке по заданной программе секций крепи, отличающийся тем, что, с целью обеспечения прямолинейности путем компенсации имеющихся искривлений базы, определяют знак угла рассогласования смежных линейных прогонов базы и для положительных углов уменьшают, а для отрицательных увеличивают очередной шаг передвижки соответствующей секции крепи.
Z. Устройство для управления перемещением базовой балки очистного агрегата периодического действия, содержащее базовую балку, выполненную в виде жестких прогонов, секции крепи, гидростойки распора и базы
и крепи, домкраты передвижки, задающие элементы в виде линейных гидравлических дозаторов, механизмы гидрозахвата, состоящие из гидроципиндров с подпружиненными поршнями, через которые перпендикулярно оси пропущены скалки дозаторов и неподвижные направляющие, укрепленные на базе, а также звенья жесткой обратной связи, соединенные с цилиндрами механизмов гидрозахвата, гидропереключателями и магнитоуправляющими датчиками контроля исполнения команд, отличающееся тем, что
оно снабжено установленными на концах смежных линейных прогонов базы датчиками угла рассогласования прогонов и автоматическими корректорами задания шага передвижки, выполненными в виде сообщающегося с поршневой полостью дозатора гидравлического цилиндра, внутри которого размещен плавающий гидрозолотник с кольцевой выточкой, причем датчики знака угла рассогласования прогонов выполнены в виде двухлинейного гидропереключателя, выходы которого соединены с входными отверстиями гидравлического цилиндра датчика знака угла.
Источники информации, принятые во внимание при экспертизе
1.Кольман В., Шмидт Г. Исследование способов замеров положения очистного забоя. Глюкауф, Э7, f 23, с. 27-32.
2.Авторское свидетельство СССР по заявке № 27 9 86/22-03, t979 (п oтoтип),
9з
/////////////7/7// //7/7////////7///7///77/У/ / // / /// // /// //// //// /
фуг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
| Механизированная крепь | 1979 |
|
SU800381A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1974 |
|
SU600304A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Механизированная крепь | 1988 |
|
SU1661440A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| Агрегат для выемки крутых пластов угля | 1983 |
|
SU1164437A1 |