Изобретение относится к измерительной технике и может быть использовано в качестве датчика углового положения вала цифровых следящих систем.
1,ель изобретения - повышение помехоустойчивости путем определения и исключения из выходного результата информации, формируемой вследствие воздействия импульсных помех.
На чертеже приведена блок-схема датчика положения вала.
Датчик содержит генератор 1 импульсов, счетчик 2, формирователь 3 опорных сигналов, фазовращатель 4, нуль-орган 5, регистры 6-8, сумматор 9, цифровой компаратор 10, датчик 11 кода, элемент 12 задержки и элемент И 13.
Выход генератора 1 импульсов подключен к входу счетчика 2, выход старщего разряда счетчика 2 через последовательно соединенные формирователь 3 опорных сигналов и фазовращатель 4 подключен к нуль- органу 5, выход нуль-органа 5 подключен к сннхровходам регистров 7 и 8, а также соединен через элемент 12 задержки с первым входом элемента И 13, выход которого подключен к синхровходу первого регистра б, код с выхода счетчика 2 одновременно поступает на регистры 6 и 7 причем выход регистра 7 подключен к входу регистра 8 и к второму входу сумматора 9, выход ре- I lurrpa 8 подключен к первому входу сумматора 9, выход которого подключен к первому входу цифрового компаратора ГО, Второй вход цифрового компаратора 10 подключен к датчику 11 кода, а выход - к второму входу элемента И 13.
Датчик работает следующим образом.
Генератор 1 формирует импульсы стабильной частоты, поступающие на счетчик 2, старший разряд которого подключен к формирователю 3 опорных сигналов, который формирует два квадратурных синусоидальных напряжения, поступающие на первичные обмотки фазовращателя 4. Фаза выходного напряжения фазовращателя 4 оказывается сдвинутой относительно опорного напряжения на угол поворота его вала, момент перехода выходного напряжения через нуль фиксируется нуль-органом 5. По переднему фронту выходного напряжения нуль-органа 5 осуществляется запись кода угла в регистры 6-8, причем в регистр 6 информация записывается только в том случае, если имеется разрешение с цифрового компаратора 10, в противном случае в регистре 6 остается прежняя информация. Запрет на запись кода угла в регистр 6 формируется 1ФИ выполнении условия.
I К,-К,-1 I Л К,-,
где к,, к, -1 -значения кодов угла на i-м и (i-1)-м интервалах дискретизации;
ЛК;-максимально возможная разность кодов на интервале дискретизации при максимальной скорости вращения вала.
Вычисление разности кодов осуществляется сумматором 9, на первый вход которого поступает код K,i с рег,истра 8, а на второй вход - код К, с регистра 7. Разность кодов сравнивается с постоянной величиной ДК;
и если условие (1) выполняется, то запись кода Ki в регистр 6 запрещается, если нет, то сигнал записи с нуль-органа 5, предварительно задержанный элементом 12 задержки на время выполнения указанных операций, через элемент И 13 проходит на синхровход регистра 6, в который записывается код угла К,;.
Если датчик положения получает питание от промышленной сети или питается от автономного источника, который одновременно питает какие-либо мощные приемНИКИ с импульсным потреблением энергии, то через емкости трансформаторов в цепи датчика проникает импульсная помеха, которая проявляется в виде высокочастотного импульса, наложенного на выходное напряжение фазовращателя и при высокой разрешающей способности датчика вызывает ложные срабатывания нуль-органа. 5. На выходе датчика это проявляется в виде шума, кратковременных резких изменений в показаниях.
В цифровых следящих системах скорость вращения вала, как правило, ограничена, поэтому известна и максимально возможная скорость изменения угла на интервале дискретизации:
35АКмакс - 7
(2)
где юмакс-максимальная скорость вращения вала, рад/с;
Гт - частота дискретизации (fr -
частота задающего генератора, п - разрядность счетчика 2).
Изменение угла за период дискретизации не может превышать величины определяемой выражением (2). Следовательно, 5 если ЛКмакс дК/, то информация достоверна, в противном случае информация считается ложной и не записывается в регистр 6.
Формула изобретения
0 Датчик положения вала, содержащий генератор импульсов, счетчик, формирователь опорных сигналов, фазовращатель, нуль- орган, два регистра, выход генератора импульсов подключен к входу счетчика, вы- с- ХОД старшего разряда группы выходов которого через формирователь опорных сигналов и фазовращатель подключен к входу нуль- органа, группа выходов счетчика подключена к информационным входам первого регистра.
выход которого является выходом датчика положения вала, отличающийся тем, что, с целью повышения помехоустойчивости, в него введены третий регистр, сумматор, датчик кода, цифровой компаратор, элемент задержки, элемент И, выход которого подключен к синхровходу первого регистра, группа выходов счетчика подключена к информационным входам второго регистра, группа выходов которого подключена к информационным входам третьего регистра и
первой группе входов сумматора, выходы которого подключены к первой группе входов цифрового компаратора, выход которого подключен к первому входу элемента И, выход нуль-органа подключен к синхровходам второго и третьего регистров и через элемент задержки к второму входу элемента И, выходы третьего регистра подключены к второй группе входов сумматора, выходы датчика кода подключены к второй группе входов цифрового компаратора.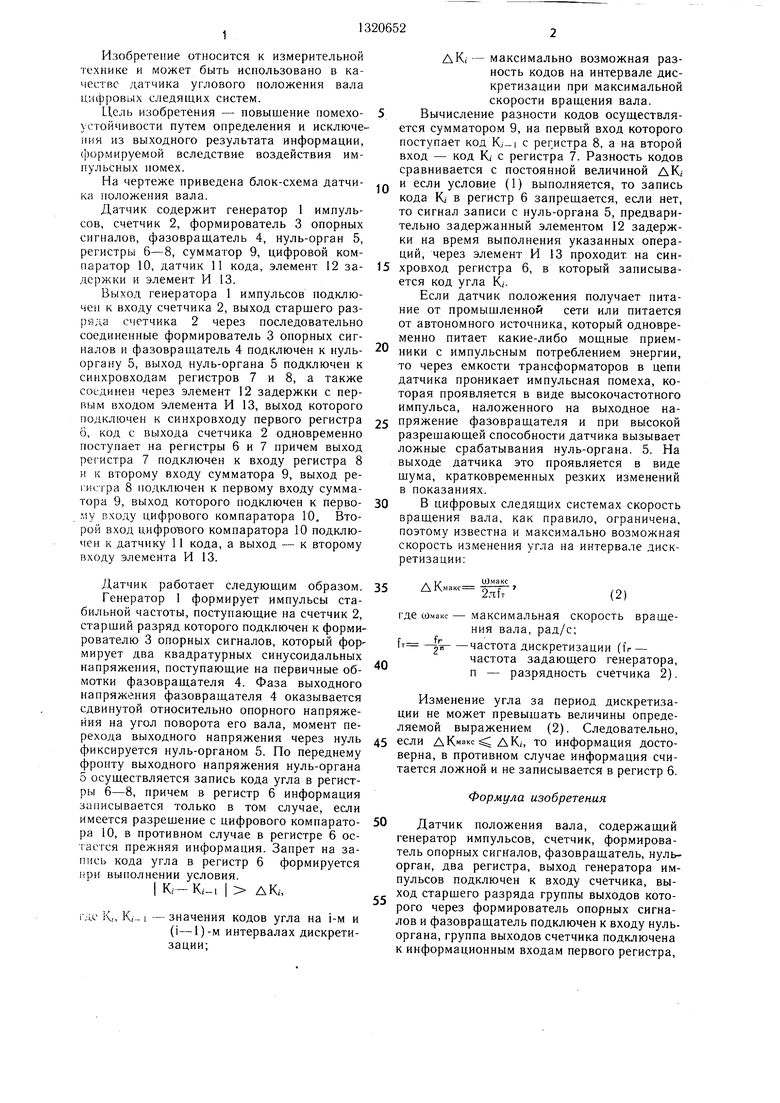
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1991 |
|
SU1833966A1 |
| Цифровой тахометр | 1989 |
|
SU1615615A1 |
| Преобразователь угла поворота и скорости вращения вала в код | 1990 |
|
SU1716602A1 |
| Датчик углового положения и скорости вращения вала | 1989 |
|
SU1695233A2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1993 |
|
RU2107390C1 |
| Фазометр | 1991 |
|
SU1817037A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1993 |
|
RU2108663C1 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1615619A2 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1599778A2 |
| Цифровой тахометр | 1983 |
|
SU1113746A1 |
Изобретение относится к измерительной технике и может быть использовано в качестве датчика углового положения вала цифровых следящих систем. Датчик содержит генератор 1 импульсов, счетчик 2, формирователь 3 опорных сигналов, фазовращатель 4, нуль-орган 5, два регистра 6, 7. С целью повыщения помехоустойчивости в него введены регистр 8, сумматор 9, цифровой компаратор 10, датчик 11 кода, элемент 12 задержки, элемент 13 И. Перед записью в выходной регистр 6 информация анализируется путем сравнения разности кодов на (i-1)-м и i-M фазовых интервалах с некоторым постоянным числом. Если разность больще этого числа, то информация считается ложной и не записывается в выходной регистр 6, что позволяет исключить из выходной информации датчика всплески значений кода, вызванные импульсной помехой. 1 ил. У5 оо ю о О) сд ю
| Зверев А | |||
| Е | |||
| и др | |||
| Преобразователи угловых перемещений в цифровой код | |||
| Л.: Энергия, 1974, с | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
| Датчик углового положения и скорости вращения вала | 1980 |
|
SU934382A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
