Изобретение относится к машиностроению и может быть использовано для балансировки ротора в процессе его вращения.
Цель изобретения - повышение точности путем использования в процессе балансировки только уровня вибрации, например вибросмещения, без расчета углового положения корректирующих масс и их установки под этим углом, что осуществляется, как правило, с ошибкой обусловленной погрешностью определения исходных данных.
На чертеже изображено устройство для реализации способа балансировки ротора.
Устройство для балансировки ротора содержит корректирующий узел, выполненный в виде двух установленных с возможностью вращения на роторе 1. кольцевых корректирующих масс 2 и 3 с одинаковыми дисбалансами и привод вращения корректирующих масс в виде редуктора 4. Редуктор 4 получает вращение от шестерни 5, жестко установленной на роторе. Вращение от редуктора корректирующим массам передается через выходное колесо 6 и зубчатые колеса 7 и 8, выполненные на массах 2 и 3. Редуктор для реверса имеет две пары зубчатых колес 9 и 10 каждая из которых включается независимо своей электромагнитной муфтой 11 или 12. При отключенных муфтах вращение корректирующим массам не передается и они сохраняют свое положение относительно ротора. Гидроцилиндр 13 служит для поочередного Ш1И одновременного соединения колеса 6 с колесами 7 и 8 корректирующих масс, что достигается смещением колеса 6 в осевом направлении на нужную величину. Датчики 14 и 15, предназначенные для фиксирования углового положения дисбалансов корректирующих масс по меткам на массах, могут быть любого типа (оптические, магнитные, индукционные, емкостные и т.д.) Датчик 16, устанавливаемый на опоре ротора, служит для получения информации о вибросмещении ротора.
Способ балансировки ротора осуществляют следующим образом.
На ротор 1 устанавливают корректирующие массы 2 и 3 и вводят в зацепление шестерню 5 с входным колесом редуктора 4. Разгоняют ротор до эксплуатационной частоты вращения. Вводят в зацепление колеса 6 и 8
путем подачи давления в полость гидроцилиндра 13 и включают муфту 12. При этом корректирующая масса 3 поворачивается и ее дисбаланс устанавливают противоположно дисбалансу корректирующей массы 2 по показаниям датчиков 14 и 15. В этом положении замеряют вибросмещение Л, датчиком 16. Поворачивают таким же образом
корректирующую массу 3 до совпадения углового положения ее дисбаланса с дисбалансом корректирующей массы 2. Перемещают колесо 6 вдоль оси до одновременного зацепления с колесами
7 и 8 и совместным вращением корректирующих масс обеспечивают минимальное вибросмещение Ал ротора. Рассчитывают вибросмещение Aj по формуле:
20
AJ 0,5 А,
(А + А,).
5
Продолжают смещение колеса 6 влево до зацепления только с колесом 7 и поворачивают корректирующую-массу 2 до получения вибросмещения. Смещают колесо 6 вправо до сцепления только с колесом 8 и поворачивают корректирующую массу 3 до минимального уровня Q вибрации ротора 1.
Способ балансировки применяется, если исходный дисбаланс ротора 1 не больше удвоенного дисбаланса одной корректирующей массы.
5 Формула изобретения
Способ балансировки ротора, заключающийся в том, что на ротор уста- навливают с возможностью вращения 0 вокруг его оси две корректирующие массы с равными дисбалансами, приводят ротор во вращение, устанавливают массы диаметраипьно противоположно, измеряют уровень вибрации ротора, 5 совмещают массы, перемещают их совместно до минимального уровня вибрации, измеряют его и результаты измерения
используют для определения оптималь- . ного положения корректирующих масс, 0 отличающийся тем, что, с целью повьшения точности, по результатам измерения .рассчитывают уровень вибрации .ротора при условии .установки.одной из масс в оптималь- 55 ное положение, поворачивают ее до достижения рассчитанного уровня вибрации и поворачивают в противоположном направлении вторую массу до достижения минимального уровня вибрации.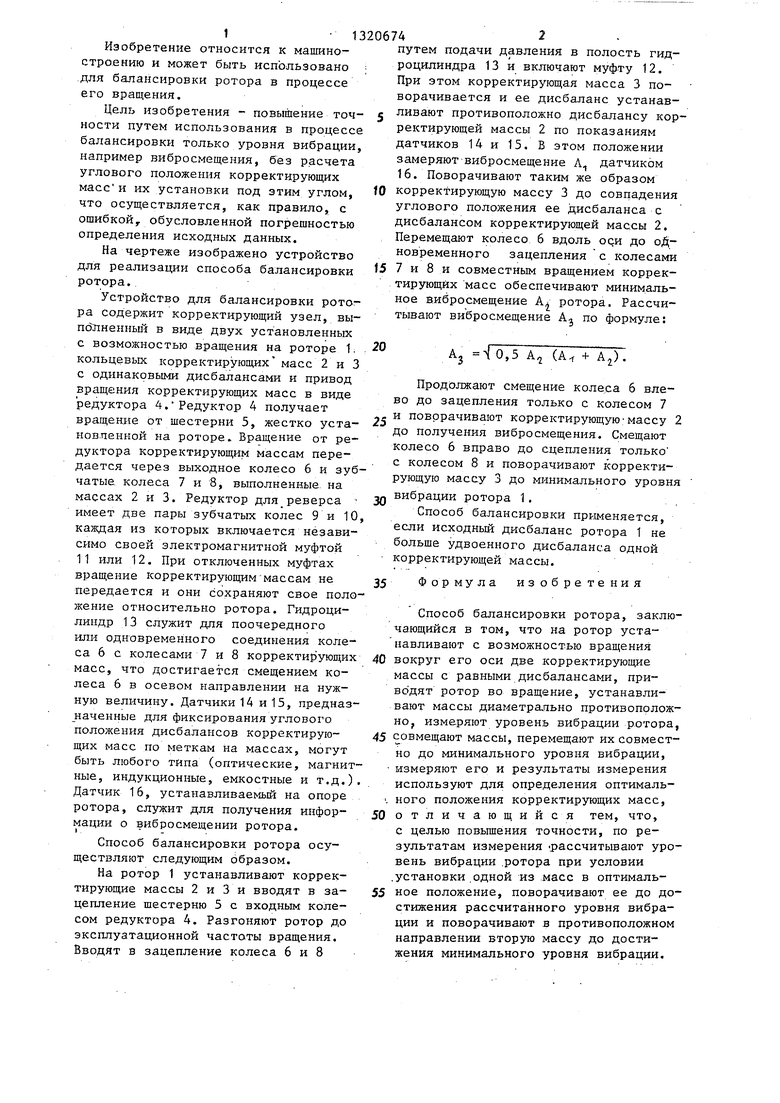
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки роторов | 1985 |
|
SU1260703A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Способ балансировки роторов иуСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU800754A1 |
| Лабораторная центрифуга | 1986 |
|
SU1395378A1 |
| Способ балансировки зубчатого механизма | 1975 |
|
SU578573A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| Устройство для балансировки роторов | 1977 |
|
SU682780A1 |
| Балансирующее устройство | 1987 |
|
SU1744545A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
Изобретение относится к машиностроению и может быть ислользовано для балансировки ротора .в процессе его вращения. Цель изобретения - повышение точности путем использования в процессе балансировки только уровня вибрации без расчета углового положения корректирующих масс и их установки под этим углом, -что осуществляется с ошибкой из-за погрешности исходных данных. Для зтого на ротор 1 устанавливают две корректирующие массы 2 и 3, имеющие равные дисбалансы, разворачивают их диаметрально противоположно и измеряют при этом уровень вибрации ротора 1. После этого массы 2 и 3 совмещают и разворачивают их совместно до минимального уровня вибрации, который и замеряют. По результатам измерения рассчитывают уровень вибрации из условия установки одной из масс в оптимальное положение и поворачивают ее до достижения этого уровня, а затем поворачивают вторую массу до получения минимального уровня вибрации. 1 ил. О) со ю о О5 4; « Ю 9 / 
| Способ балансировки роторов | 1981 |
|
SU1013784A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
