Изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений вращаю- ш,ихся объектов.
Целью изобретения является повышение точности измерения путем исключения из выходного сигнала датчика пространственных гармоник высшего порядка.
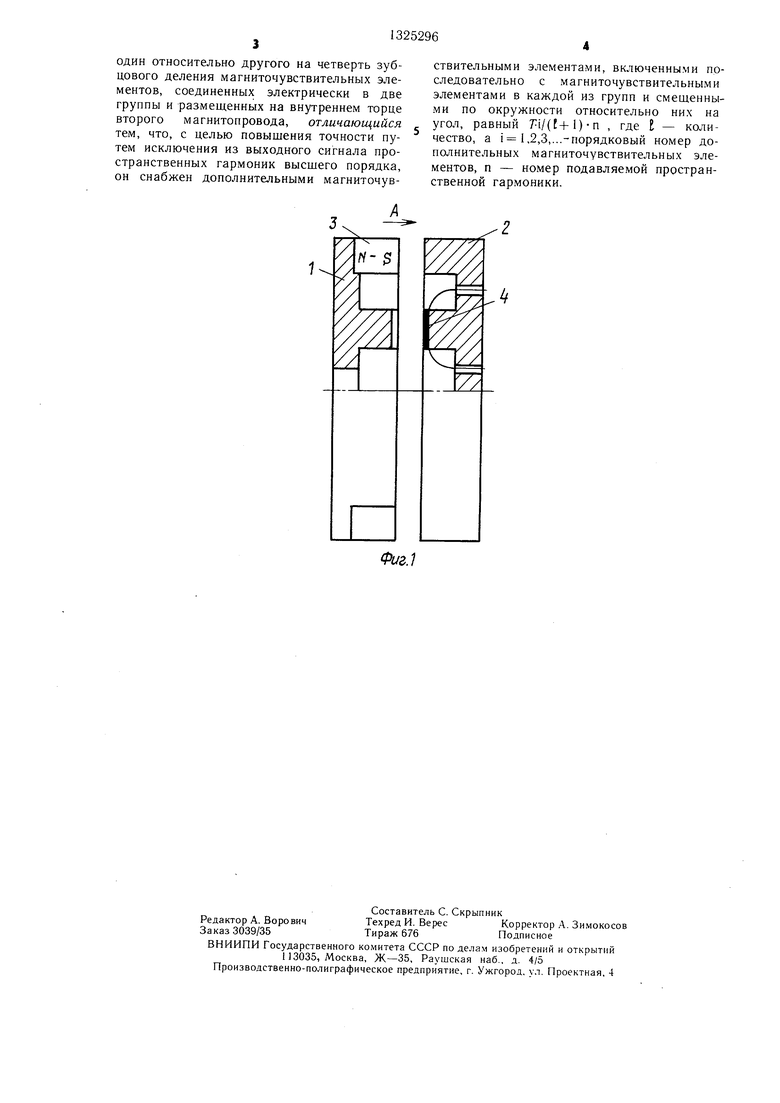
На фиг. 1 представлен датчик угла поворота, общий вид; на фиг. 2 - вид А на фиг. 1 (расположение магниточувствитель- ных элементов (МЧЭ) по окружности маг- нитопровода датчика).
Датчик угла поворота содержит два кольцевых магнитопровода 1 и 2, установленных соосно и разделенных зазором. Маг- нитопроводы 1 и 2 имеют П-образную форму в своем поперечном сечении и установлены торцами один к другому. На наружном торце магнитопровода 1 установлен кольцевой постоянный магнит 3. Внутренний торец магнитопровода 1 выполнен зубчатым с постоянным шагом Т, На внутреннем торце магнитопровода 2, сопряженным с внутренним торцом магнитопровода 1, размещены пары смещенных один относительно другого на четверть зубного деления МЧЭ 4 и 5, распределенных по окружности магнитопровода 2 иди равномерно, или с изменяющимся шагом.
Последовательно с МЧЭ в каждой из групп включены дополнительные МЧЭ 6 и 7, смещенные по окружности относительно МЧЭ 4 и 5 на угол, равный -(7Tiyr I- количество, i l, 2, 3... - порядковый номер дополнительных МЧЭ, например маг- ниторезисторов, Т - зубцовый шаг первого магнитопровода 1, п - номер подавляемой пространственной гармоники.
45
Каждая группа смещенных на 1/4 Т МЧЭ состоит из одинакового количества основных МЧЭ 4 и 5, а также дополнительных МЧЭ 6 и 7. Таким образом, общее сопротив- 40 ление каждой группы МЧЭ складывается из суммарных сопротивлений входящих в них основных и дополнительных МЧЭ.
Датчик угла поворота работает следующим образом.
Магнитопровод 1 присоединяется, например, к объекту контроля, а магнитопро- вод 2 закрепляется неподвижно или на другом объекте, относительно которого измеряется перемещение первого объекта. Магнитное поле в датчике создается постоянным магнитом 3. Величина магнитной индукции Б зазоре между магнитопроводами 1 и 2 должна обеспечивать работу магни- точувствительных элементов 4 и 5 на линейном участке их характеристики. Период
Для исключения пространственных гармоник высшего порядка из выходного сигнала датчика необходимо обеспечить уничтожение соответствующих составляющих в суммарном сопротивлении (1) и (2) ос- 35 новных и дополнительных МЧЭ, что достигается надлежащим выбором углового с.ме- щения Т, по окружности между каждым основным и подключенны.м к нему пос.тедо- вательно дополнительным МЧЭ. В результате соответствующие составляющие высших пространственных гармоник в выходных сигналах основных и дополнительных МЧЭ образуют замкнутую систему от О до 2Град, что обеспечивает их исключение из результирующего выходного сигнала датчика, благодаря чему повышается точность измерения угла поворота.
Формула изобретения
50 Датчик угла поворота, содержащий установленные соосно торцами один к другому с возможностью относительного вращения первый и второй кольцевые магнито- проводы П-образного сечения, постоянный магнит кольцевой формы, установленный
изменения индукции для каждого из маг-55 на наружном торце первого магнйтопровониторезисторов при взаимном перемещениида, на внутреннем торце которого выполнемагнитопроводов 1 и 2 равен зубцовомуны равномерно расположенные по его окружшагу Т.ности с шагом Т зубцы, пары смещенныхПоскольку внутренний торец магнитопровода I выполнен зубчатым, то закон изменения магнитной индукции в зазоре между магнитопроводами 1 и 2 содержит помимо основной гармоники с периодом, равным щагу Т, кратные ей высшие пространственные гармоники.
Если принять, что магниторезисторы осуществляют линейное преобразование магнитной индукции в изменение сопротивления, то в законе изменения этого сопротивления присутствуют постоянная составляющая, основная гармоника и кратные ей высшие гармоники.
Суммарное сопротивление г каждого основного МЧЭ 4 и 5 и подключенных к ним дополнительных МЧЭ 6 и 7 может быть описано в виде
rWcA)r, (i)+ r6i.(d) (1) и1
,{ ) (d. )+ щ (ы. ) ,(2)
где - контролируемый угол поворота.
Поскольку сопротивление магниторезис- торов прямо пропорционально магнитной индукции, а в ненасыщенном зубчатом зазоре магнитная индукция прямо пропорциональна удельной магнитной проводимости, то коэффициент нелинейных искажений выходного сигнала зависит от амплитуды рабочей и высших пространственных гармоник удельной магнитной проводимости.
Для исключения пространственных гармоник высшего порядка из выходного сигнала датчика необходимо обеспечить уничтожение соответствующих составляющих в суммарном сопротивлении (1) и (2) ос- новных и дополнительных МЧЭ, что достигается надлежащим выбором углового с.ме- щения Т, по окружности между каждым основным и подключенны.м к нему пос.тедо- вательно дополнительным МЧЭ. В результате соответствующие составляющие высших пространственных гармоник в выходных сигналах основных и дополнительных МЧЭ образуют замкнутую систему от О до 2Град, что обеспечивает их исключение из результирующего выходного сигнала датчика, благодаря чему повышается точность измерения угла поворота.
Формула изобретения
50 Датчик угла поворота, содержащий установленные соосно торцами один к другому с возможностью относительного вращения первый и второй кольцевые магнито- проводы П-образного сечения, постоянный магнит кольцевой формы, установленный
один относительно другого на четверть зуб- цового деления магниточувствительных элементов, соединенных электрически в две группы и размещенных на внутреннем торце второго магнитопровода, отличающийся тем, что, с целью повышения точности путем исключения из выходного сигнала пространственных гармоник высшего порядка, он снабжен дополнительными магниточувствительными элементами, включенными последовательно с магниточувствительными элементами в каждой из групп и смещенными по окружности относительно них на угол, равный П/(Е+1) П , где - количество, а i 1,2,3,...-порядковый номер дополнительных магниточувствительных элементов, п - номер подавляемой пространственной гармоники.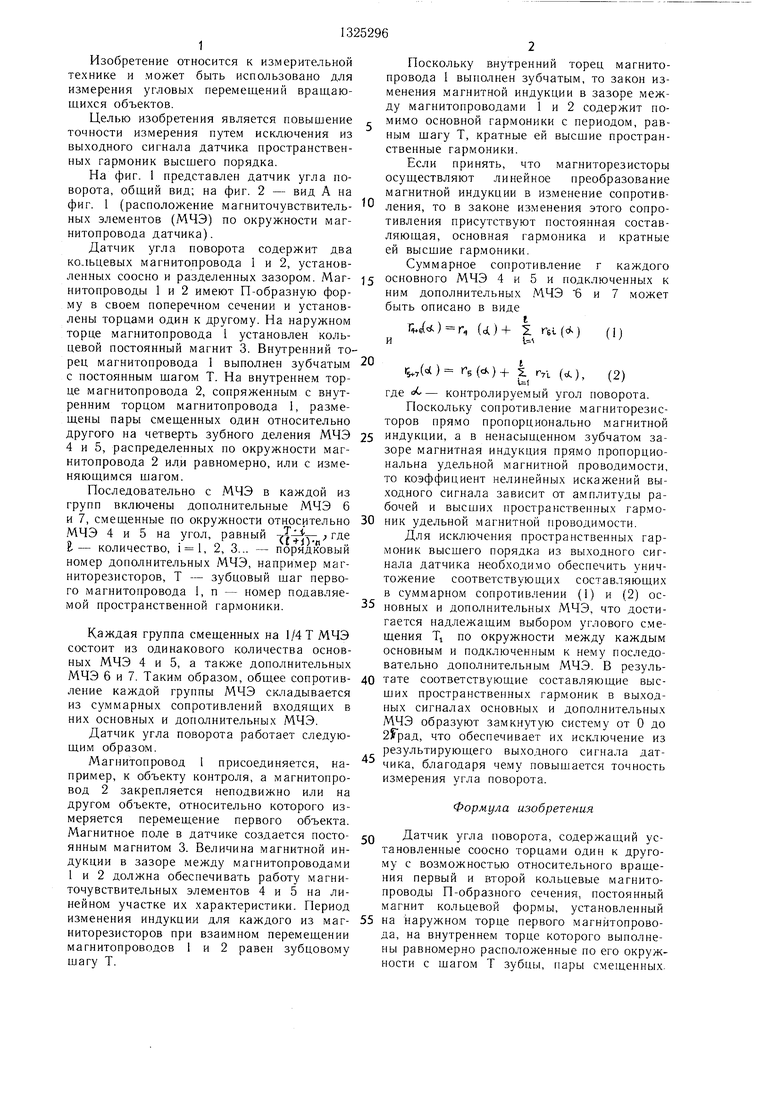
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота | 1985 |
|
SU1268945A1 |
| Датчик угла поворота | 1989 |
|
SU1702170A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| Преобразователь линейного перемещения в электрический сигнал | 1981 |
|
SU1012021A1 |
| Трехфазный статический ферромагнитный учетверитель частоты | 1977 |
|
SU693518A1 |
| Бесконтактный датчик перемещения | 1987 |
|
SU1744431A1 |
| Вентильный электродвигатель | 1982 |
|
SU1062829A1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1994 |
|
RU2124736C1 |
Изобретение относится к измерительной технике и имеет целью повышение точности датчика для измерения угла поворота путем исключения из его выходного сигнала пространственных гармоник высшего порядка. Датчик содержит дополнительные магниточувствительные элементы 6 и 7, соединенные с основными магниточувствительными элементами 4 и 5 и смещенные по окружности относительно них на угол, равный Ti(E-f 1) п, где I - количество; i 1,2,3... - порядковый номер допатни- тельных магниточувствительных элементов; п - номер подавляемой пространственной гармоники; Т - величина зубцового деления магнитопровода 2, установленного с возможностью поворота относительно этих магниточувствительных элементов. В результате при враш,ении контролируемого объекта происходит периодическое изменение сопротивления групп магниточувствительных элементов по закону синуса и косинуса, а соответствуюш.ие высшие пространственные гармоники исключаются из результирующего выходного сигнала датчика благодаря угловому смещению между формирующими его основными и дополнительными магниточувствительными элементами. 2 ил. (О (Л СО to СП ГС СО 05
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
