Известны устройства механической погрузки дров и короткомерных сортиментов в контейнеры-кассеты, выполненные в виде двух поворотных вокруг параллельных осей вилок (лап), образующих приемный бункер ДЛЯ сортиментов, и транспортеров, ленточного и поперечного цепного, ДЛЯ подачи дров и короткомерных сортиментов в бункер. Формирующие лапы устройства выполнены в виде прямых рычагов, установленных на значительном расстоянии друг от друга.
При таком конструктивном выполнении машина плохо формирует пучок, а лапы подвержены действию большого крутящего момента. Кроме этого, управление формирующими лапами осуществляется, вручную, что создает затруднения при заполнении свободного объ;ема контейнеракассеты.
В предложенном устройстве эти недостатки устраняются за счет того, -ITO формирующие вилки выполнены в виде рычагов криволинейной формы, которые работают от электромеханического привода и управляются фотореле.
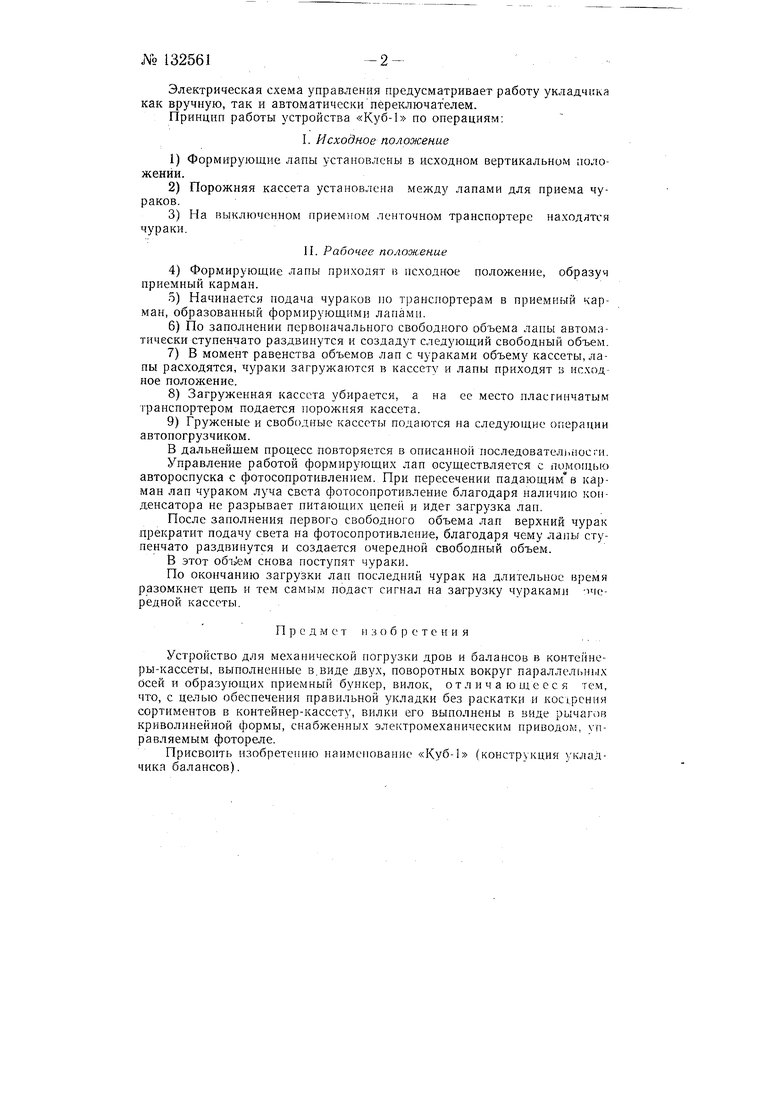
На фиг. 1 изображено предложенное устройство в двух проекциях; на фиг, 2-схема автороспуска формирующих лап.
Устройство состоит из рамы 1 с криволинейными формирующими рычагами (вилками) 2, приводящимися в действие через звездочки 3 и цепь 4, секторов 5, ленточного 6, роликового 1, сбрасывающего 8, подъемного Я горизонтального 10 и пластинчатого 11 (для кассет) транспортеров, приводных станций 12 и пульта управления 13 с фотореле.
Предлол-сенное конст{ууктивное решение устройства позволяет правильно без раскатки и кострения укладывать сортименты в контейнеркассету. Механизм периодического включения выключения сбрасывающего транспортера обеспечивает изменение движения чурака из продольного в поперечное на захваты под1:1емного транспортера.
№ 132561-2Электрическая схема управления предусматривает работу укладчика как вручную, так и автоматически переключателем.
Принцип работы устройства «Куб-1 по операциям:
I.Исходное положение
1)Формирующие лапы установлены в исходном вертикальном положении.
2)Порожняя кассета установлена между лапами для приема чураков.
3)На выключенном прием гом ленточном транспортере находлтся чураки.
II.Рабочее положение
4)Формирующие лапы приходят в исходное положение, образуя приемный карман.
5)Начинается подача чураков по транспортерам в приемный карман, образованный формирующими лапами.
6)По заполнении первоначального свободного объема лапы автоматически ступенчато раздвинутся и создадут следующий свободный объем.
7)В момент равенства объемов лап с чураками объему кассеты, лапы расходятся, чураки загружаются в кассету и лапы приходят в исходное положение.
8)Загруженная кассета убирается, а на ее место пластинчатым транспортером подается порожняя кассета.
9)Груженые и свободные кассеты подаются на следующие операции автопогрузчиком.
В дальнейшем процесс повторяется в описанной последовател),иосги.
Управление работой формирующих лап осуществляется с помоп ью автороспуска с фотосопротивлением. При пересечении падающим в карман лап чураком луча света фотосопротивление благодаря наличию конденсатора не разрывает питающих цепей и идет загрузка лап.
После заполнения первого свободного объема лал верхний чурак прекратит подачу света на фотосопротивлепие, благодаря чему лапы ступенчато раздвинутся и создается очередной свободный объем.
В этот объем снова поступят чураки.
По окончанию загрузки лап последний чурак на длительное время разомкнет цепь и тем самым подаст сигнал на загрузку чураками очередной кассеты.
Пред м е т и з о б р е т е и и я
Устройство для механической погрузки дров и балансов в контейнеры-кассеты, выполненные в.виде двух, поворотных вокруг параллел1 ных Осей и образующих приемный бункер, вилок, отличающееся тем, что, с целью обеспечения правильной укладки без раскатки и косхрения сортиментов в контейнер-кассету, вилки его выполнены в виде рычагов криволинейной формы, снабженных электромеханическим приводом, управляемым фотореле.
Присвоить изобретению наименование «Куб-1 (конструкция уклаДчикя балансов).
,c riJjljN - x- TX
.л
. /