Группа изобретений относится к оборудованию деревообрабатывающей промышленности для поперечной резки хлыстов или стволов деревьев на мерные отрезки для получения чураков при подготовке фанерного сырья и может использоваться при раскряжевке хлыстов в лесной и деревообрабатывающей промышленности.
1.1. Известен способ поперечного раскроя ствола на чураки на примере поперечного раскроя хлыста, при котором на безупорных установках с продольной подачей, точный останов ствола обеспечивается остановом подающего транспортера. Оператор или ЭВМ оценивает параметры ствола и по результатам оценки производит последовательную выпиловку. В начальный момент времени включается привод и начинается разгон подающего транспортера вместе со стволом. Допустимое ускорение ствола на подающем транспортере определяется минимально возможным коэффициентом трения между стволом и элементом перемещения подающего транспортера. В начальный первый момент времени, подающий транспортер со стволом достигает значения установившейся скорости и продолжает с ней двигаться. В это время определяются плоскости реза, которые соответствуют схеме раскроя и времени надвигания режущего органа в период торможения и реза. Далее ствол поступает на приемный транспортер. Когда ствол начинает перемещаться по приемному транспортеру, начинается равноускоренное надвигание режущего органа до момента врезания пилы в ствол. При приближении плоскости реза к месту к плоскости реза режущего органа замедляется скорость движения ствола, а когда плоскость реза по схеме раскроя совпадает с плоскостью режущего органа, скорость механизма перемещения равна нулю. При заходе пильного диска в ствол скорость надвигания уменьшается, затем после перерезания ствола в определенный момент времени становится равной нулю, после чего подается команда на реверс пилы с максимальной скоростью. Когда пильный диск полностью выходит из пропила в стволе, подается команда на запуск подающего транспортера для перемещения остатка ствола для совпадения следующей плоскости с плоскостью надвигания режущего органа по предыдущей схеме, и процесс повторяется. См. описание к авторскому свидетельству SU №1025324, столб. 3, 4, опубликованное 23.06.1983, Бюл. №23. Данный способ поперечного раскроя состоит из двух транспортеров, не связанных между собой. Поэтому в процессе работы установки происходит смещение их не только относительно друг друга, но и места, определенного для реза. В итоге получаются чураки разной длины, что в дальнейшем плохо сказывается на процессе захвата их и обработки. Во время пиления ствол своей массой давит на рябухи. Увеличивает давление на подшипниковые узлы и сама пила. Фиксация ствола от смещения добавляет свою лепту по нагрузке на подшипниковые узлы. Эти нагрузки приводят к разрушению подшипникового узла и выходу из строя механизма перемещения, а значит и замены их с остановкой работы самой установки. Поштучный распил стволов имеет малую производительность, и работа механизмов с резкой переменой нагрузок, то ускоряясь, то замедляясь, негативно сказывается на них и приводит к ускоренному износу. Схема раскроя не устанавливается расстановкой пил и даже при торцовке необходимо задействовать всю последовательность операции, как и для получения готового изделия - чурака или сортимента. Не определен порядок освобождения приемного транспортера от готового изделия.
1.2. Известен принятый за прототип способ поперечного раскроя ствола на чураки, который осуществляется следующим образом. Ствол с общего продольного конвейера поступает на продольный подающий конвейер установки поперечного раскроя и перемещается по его вращающимся (с одной скоростью) рябухам к режущему органу пильного механизма до упорной перекладины, находящейся в состоянии отмера по размеру чурака, после чего производится остановка подающего конвейера. Затем производится захват и фиксация ствола относительно заданного размера и места пропила, после чего включается двигатель, который вращает режущий орган пильного механизма. Одновременно подается давление на гидроцилиндр, который вместе с двигателем и режущим органом опускает их вниз по радиусу вокруг оси подшипникового узла пильного механизма. При этом наружный диаметр режущего органа опускается несколько ниже осевой линии диаметра рябухи и тем самым получается отрезок ствола необходимого размера. Затем поднимают режущий орган вверх на исходную позицию. Как только режущий орган занял исходную позицию, раздвигают рычаги захватов и чурак с остатком ствола высвобождают из захватов. Затем осуществляется подъем упорной перекладины, и принимающий транспортер перемещает первый готовый чурак за пределы упорной перекладины, и затем она вновь опускается в состояние отмера. Далее вновь включается подающий конвейер, и остаток ствола перемещается по его рябухам к режущему органу пильного механизма до упорной перекладины, находящейся в состоянии отмера по размеру чурака, после чего производится остановка подающего конвейера, и все дальнейшие операции повторяются. Только в этом случае фиксация ствола производится одним устройством фиксации, расположенным между устройством отмера и плоскостью пропила. При перемещении третьего чурака по принимающему транспортеру, одновременно опускается вниз последнее звено подающего транспортера и дровяной остаток падает вниз в специальный контейнер, установленный под образовавшимся проемом, который после наполнения меняется на порожний контейнер. Для данного способа предусмотрены еще две операции, одна из которых применяется, если передний торец ствола по ходу его движения имеет дефект. В этом случае, ствол подвергается торцовке режущим органом. Этим действием повышается качество чурака, но в этом случае появляются дополнительные операции, приводящие к дополнительным затратам и удлинению процесса получения чураков в целом. Кроме этого, дополнительная торцовка производится по оценке оператора. В результате этого дровяной остаток получается в начале раскроя ствола на чураки и поэтому фиксация ствола производится одним устройством фиксации подающего транспортера.
Если передний торец ствола по ходу его движения не имеет дефектов, то ствол проходит под режущим органом пильного механизма и, замедляя движение, останавливается, упираясь в пластину демпфера, которая выставлена в заданный размер отмера. Подается сигнал на гидроцилиндры, и штоки их втягиваются, сдвигая между собой рычаги захватов, перемещая их к осевой линии конвейеров. Одновременно с подъемом режущего органа шток гидроцилиндра перекладины тянет проушины вниз, поворачивая упорную перекладину вместе с демпфером вокруг оси, поднимая тем самым упорную перекладину вверх, освобождая возможность перемещения чурака по принимающему транспортеру. Подъем перекладины осуществляется с одновременным отводом демпфера от переднего торца чурака в сторону по направлению движения ствола. Для перемещения чурака по принимающему транспортеру включается установленный на нем привод, который через редуктор вращает выступающий конец вала рябухи. Вращение этой рябухи передается смежным рябухам, а от них последующим благодаря цепям и парным звездочкам. Таким образом, вращаются все рябухи принимающего транспортера, перемещая чурак по нему для передачи его на общую линию перемещения чураков на оцилиндровку. При этом, как только задний торец чурака покидает зону отмера, пускают упорную перекладину в пазы стоек, преграждая возможность перемещения ствола по принимающему транспортеру. Установка заняла исходное положение. Включается общий продольный конвейер и подающий конвейерб и происходит перемещение оставшейся части ствола по его рябухам к режущему органу пильного механизма, и процесс раскроя ствола на чураки повторяется. См. описание патента на изобретение RU №2060874. Хотя теперь механизм перемещения состоит из двух связанных транспортеров, и в итоге получаются чураки стандартной длины, при этом во время пиления ствол своей массой не давит на рябухи. Поштучный распил стволов имеет малую производительность. Схема раскроя не устанавливается расстановкой пил и даже при торцовке необходимо задействовать всю последовательность операции, как и для получения готового чурака. Не определен порядок освобождения приемного транспортера от готового изделия.
2.1. Известна установка поперечного раскроя ствола на чураки, состоящая из подающего механизма, выполненного в виде продольного транспортера, имеющего тяговый орган (цепь, ленту), установленный на звездочках (шкивах), которые смонтированы на раме, режущего органа, датчика перемещения, приемного транспортера. См. описание к авторскому свидетельству SU №1025324, опубликованное 23.06.1983, Бюл. №23. Однако механизм перемещения состоит из двух транспортеров, не связанных между собой. Поэтому в процессе работы установки происходит смещение их не только относительно друг друга, но и места, определенного для реза. В итоге получаются чураки разной длины, что в дальнейшем плохо сказывается на процессе захвата их и обработке. Во время пиления ствол своей массой давит на рябухи. Увеличивает давление на подшипниковые узлы и сама пила. Фиксация ствола от смещения добавляет свою лепту по нагрузке на подшипниковые узлы. Эти нагрузки приводят к разрушению подшипникового узла и выходу из строя механизма перемещения, а значит, и замены их с остановкой работы самой установки.
2.2. Известна принятая за прототип установка для поперечного раскроя ствола на чураки, содержащая механизм перемещения ствола в виде подающего и принимающего транспортеров, устройство отмера длины чурака, два устройства фиксации ствола и пильный механизм с режущим органом, установленный на раме. При этом установка содержит неразъемный каркас, выполненный в виде силовой рамы, на которой установлены два разнесенных каркаса устройств фиксации, рамы подающего и принимающего транспортеров и расположенные над рамой принимающего транспортера две стойки устройства отмера длины чурака, выполненного в виде упора с демпфером, содержащим треугольную пластину, а рама пильного механизма имеет площадку обслуживания и установлена с обеспечением пропила режущего органа на постоянном от треугольной пластины демпфера месте, и симметрично относительно вертикальной линии, проходящей через продольную ось симметрии механизма перемещения ствола, при этом режущий орган пильного механизма расположен между двумя устройствами фиксации ствола. См. описание патента на изобретение RU №2060874. Хотя многие недостатки устранены данным изобретением, однако массивный пильный механизм металлоемкий и не позволяет в этой конструкции использовать их несколько с целью повышения производительности получения чураков.
3.1. Известен способ фиксации ствола во время пиления, при котором захват ствола производится снизу двумя рычагами, установленными снизу. При этом свободные концы направлены вверх. Фиксация и освобождение от нее осуществляется при помощи двух пневмоцилиндров, вращающих половинки шестерен, находящихся в зацеплении между собой и рычагами. См. Б.Г. Зеленгер, П.В. Ласточкин, С.П. Бойков. Технология и оборудование лесных складов. - М.: Лесная промышленность, 1984, стр. 76, рис 4.7б. Данное устройство снизу транспортера подвергается загрязнению отходами пиления и грязью, находящейся на стволах. Рябухи, перемещая ствол, не способствуют его очищению от загрязнения.
3.2. Известен принятый за прототип способ фиксации ствола, при котором захват и фиксация ствола относительно заданного размера и места пропила производится рычагами захватов, расположенными с двух сторон П-образных стоек, между которыми перемещается ствол. Подается сигнал на гидроцилиндры и штоки их втягиваются, сдвигая между собой рычаги захватов, перемещая их к осевой линии конвейеров. Но так как сверху рычаги захватов установлены на разнесенные между собой неперемещаемые оси, то нижняя часть рычагов захвата перемещается по радиусу вокруг центра оси, сжимая между собой ствол. При этом захват ствола зазубринами происходит при условии, что в момент захвата вершины зазубрин расположены относительно вертикальной линии, проходящей через ось симметрии транспортеров под небольшим углом с образованием V-образной призмы. Одновременно производится его центровка. При этом фиксация ствола в зависимости от расположения ствола и его длины может производиться одним или двумя устройствами фиксации. См. описание патента на изобретение RU №2060874. Захват с центровкой ствола приводит к созданию напряжений, негативно сказывающихся на процессе пиления. Захват производится только части ствола, что тоже создает напряжение. В результате захвата рычаги захватов, с учетом их длины, могут выходить из плоскости и не быть перпендикулярными к направлению движения ствола, что создает нагрузки на оси, вокруг которых они вращаются, и это обстоятельство со временем ухудшает условия захвата и снижает срок их службы.
4.1. Известно устройство фиксации ствола во время пиления, состоящее из двух рычагов, шарнирно установленных на раме со свободными концами, направленными вверх. Фиксация и освобождение от нее осуществляется при помощи двух пневмоцилиндров. См. Б.Г. Зеленгер, П.В. Ласточкин, С.П. Бойков. Технология и оборудование лесных складов. - М.: Лесная промышленность, 1984, стр. 76, рис 4.7б. Данное устройство снизу транспортера подвергают его загрязнению отходами пиления и грязью, находящейся на стволах. Рябухи, перемещая ствол, не способствуют его очищению от загрязнения. Эти обстоятельства снижают ресурс работоспособности таких устройств. Захват с центровкой ствола приводит к созданию напряжений, негативно сказывающихся на процессе пиления.
4.2. Известно принятое за прототип устройство фиксации ствола установки для поперечного раскроя ствола на чураки, содержащее шарнирно установленные плоские рычаги захвата со свободными концами и гидроцилиндры. При этом устройство содержит две П-образные вертикально установленные на силовой раме установки поперечного раскроя ствола на чураки стойки, жестко соединенные между собой продольными перекладинами с разнесенными на внешней стороне кронштейнами, на осях которых под углом расположены гидроцилиндры. Штоки соединены с плоскими рычагами захвата, выполненными сужающимися книзу, образуя совмещенные под тупым углом короткие и удлиненные части с зазубринами, обращенными во внутрь П-образной стойки, с возможностью ограниченного вращения их в плоскости, перпендикулярной продольному перемещению ствола с захватом ствола между зазубринами в нижней половине его диаметра. См. описание патента на изобретение RU №2060874. Данное устройство не подвергается загрязнению отходами пиления и грязью, находящейся на стволах. Однако захват с центровкой ствола приводит к созданию напряжений, негативно сказывающихся на процессе пиления. Захват производится только части ствола, что тоже создает напряжение. В результате захвата рычаги захватов, с учетом их длины, могут выходить из плоскости и не быть перпендикулярными к направлению движения ствола, что создает нагрузки на оси, вокруг которых они вращаются, и это обстоятельство со временем ухудшает условия захвата и снижает срок их службы.
5.1. Известен механизм перемещения ствола, состоящий из подающего и принимающего транспортеров, установленных на отдельных рамах с промежутком между ними для прохождения режущего органа пильного узла. Вдоль рам сверху расположены конические ролики (рябухи), концы валов которых установлены в шарикоподшипниковые узлы. С одной из сторон рамы конические ролики имеют удлиненные валы, на которых установлены парные звездочки, соединенные между собой цепью, а одна из крайних звездочек соединена с приводной цепью. См. описание к авторскому свидетельству SU №1025324, фиг. 4, опубликованное 23.06.1983, Бюл. №23. Данный механизм перемещения ствола приспособлен к распиловке ствола на нужный размер, но его преимущества проявляются только при поперечной подаче хлыста. При продольной подаче бревна в случае образования коротыша при откомлевке и вырезке он может служить затором для перемещения следующего бревна. Например, если он застрянет в промежутке между подающим и принимающим транспортерами, а не провалится между ними, что может привести к остановке процесса раскряжевки.
5.2. Известен принятый за прототип механизм перемещения ствола установки для поперечного раскроя ствола на чураки, содержащий подающий и принимающий транспортеры с приводами, рамы которых установлены с промежутком для прохождения режущего органа пильного механизма, а вдоль рам сверху расположены рябухи, концы валов которых расположены в шарикоподшипниковых узлах и выполнены с одной стороны удлиненными с установленными на них парными звездочками, соединенными между собой цепью. При этом принимающий транспортер оснащен устройством отмера длины чурака, рамы подающего и принимающего транспортеров объединены снизу неразъемным соединением с силовой рамой установки для поперечного раскроя ствола на чураки, при этом последняя рябуха подающего транспортера расположена на кронштейне, установленном на валу предыдущей рябухи с возможностью при необходимости поворачивания вниз для прохождения остатка ствола, а каждый привод подающего и принимающего транспортеров установлен на конце вала рябухи со стороны, противоположной установленным парным звездочкам, и совмещен с ним через отверстие редуктора. См. описание патента на изобретение RU №2060874. Хотя многие недостатки устранены данным изобретением, однако массивный пильный механизм металлоемкий и не позволяет в этой конструкции механизму перемещения использовать их несколько с целью повышения производительности получения чураков.
Задачей изобретения является создание менее сложной и более надежной конструкции установки, а также механизмов и узлов, ее составляющих, повышение сроков службы установки и повышение эффективности ее работы, обеспечение стабильного процесса фиксации ствола без дополнительных нагрузок на механизм перемещения, снижение энергетических затрат.
Технический результат изобретения заключается в значительном упрощении составляющих конструктивных элементов устройства и снижении энергетических затрат, в исключении привлечения дополнительного оборудования, а также снижении себестоимости изготовления и эксплуатации, сокращении времени обработки, оптимизации производственного цикла при изготовлении фанеры и в значительном повышении производительности.
Это достигается тем, что способ поперечного раскроя ствола на чураки, при котором ствол с общего продольного конвейера поступает на механизм и движется по нему от вращающихся рябух к режущему органу пильного механизма, после чего производится остановка перемещения ствола на всем пути его движения с опусканием откидного кронштейна. Затем производятся захват и фиксация ствола относительно места пропила пильного механизма, после чего включается электродвигатель пильного механизма, который вращает режущий орган пильного механизма с одновременной подачей давления на гидроцилиндр, который надвигает режущий орган пильного механизма на ствол в месте пропила на угол до получения полного пропила ствола, после чего осуществляется подъем режущего органа вверх на исходную позицию, и как только режущий орган занял исходную позицию, раздвигаются рычаги захватов и включаются все механизмы перемещения, при этом движение ствола по механизму перемещения продолжается до его полного размещения на нем согласно определенной схеме его раскроя таким образом, чтобы захват и фиксация ствола относительно места пропила соответствовали расстановке пильных механизмов в местах получения чураков и при установке всех режущих органов всех пильных механизмов в соответствующих плоскостях реза, с остановкой перемещения ствола на всем пути его движения, после чего осуществляется захват ствола без нарушения состояния покоя, а надвигание режущего органа на ствол осуществляется всеми пильными механизмами до получения заданного количества чураков и двух остатков, самопроизвольно удаляющихся с механизма перемещения, после чего производится подъем откидного кронштейна в исходное положение и установка рычагов захвата в исходное положение с последующим включением всех механизмов перемещения с одновременным последовательным удалением чураков с образованием гарантированных зазоров между ними, а также поступающим другим стволом и стволом, следующим за ним.
Это достигается тем, что установка для поперечного раскроя ствола на чураки, содержащая механизм перемещения ствола за счет вращающихся рябух в виде подающего транспортера с откидным кронштейном и принимающего транспортера с устройством отмера, устройства фиксации ствола и пильный механизм, при этом установка содержит неразъемный каркас, выполненный в виде силовой рамы, на которой установлены устройства фиксации, с подающего и принимающего транспортеров, при этом режущий орган пильного механизма расположен между устройствами фиксации ствола, при этом механизм перемещения состоит из двух продольных транспортеров, подающего стволы транспортера и удаляющего чураки транспортера, которые расположены на одной раме и на одной линии перемещения ствола, и является одновременно столом раскроя и распилочным столом установки, на котором полностью размещается ствол, при этом на откидном кронштейне размещена первая рябуха, принимающая ствол, а устройство фиксации состоит из шести П-образных стоек, образующих общий каркас фиксации установки, с двух сторон которого и между парными П-образными стойками расположены пильные механизмы на силовой раме установки, а режущие органы которых перемещаются в плоскостях реза согласно схеме раскроя за счет гидроцилиндров, при этом каждый пильный механизмы состоит из режущего органа цепной пилы с электродвигателем, конец выходного вала которого через сцепление соединен с пильным валом вращения режущего органа, установленного с возможностью его поворота в плоскости реза на угол поворота, равный менее 80 градусов, при этом ось пильного вала режущего органа находится несколько ниже горизонтальной плоскости, в которой расположены оси вала вращения рябух.
Это достигается тем, что способ фиксации ствола, при котором захват и фиксация ствола относительно заданного размера и места пропила производятся подачей сигналов на гидроцилиндры рычагов захвата, расположенных с двух сторон П-образных стоек, между которыми размещен ствол в состоянии покоя, перемещением рычагов захвата по радиусу вокруг центра оси установки в сторону ствола, при этом захват ствола осуществляется ниже осевой линии ствола под небольшим углом, при этом захват ствола осуществляется по всей длине ствола с компенсацией возможного воздействия на перекос оси установки рычагов захвата в два этапа захвата, включающие последовательный подвод одного из рычагов захвата к стволу с одной стороны ствола до касания и остановки его до касания второго рычага с другой стороны с последующим одинаковым поджатием с двух сторон.
Это достигается тем, что устройство фиксации ствола установки для поперечного раскроя ствола на чураки, содержащее шарнирно установленные плоские рычаги захвата со свободными концами удлиненных частей с зазубринами, обращенных во внутрь П-образной стойки, совмещенных под тупым углом с короткими частями, и с возможностью ограниченного вращения их в плоскости, перпендикулярной продольному перемещению ствола с захватом ствола между зазубринами в нижней половине его диаметра, при этом устройство содержит расположенные перпендикулярно продольному перемещению ствола парные П-образные стойки, вертикально установленные на силовой раме установки, жестко соединенные между собой с разнесенными снизу кронштейнами на продольных перекладинах, на осях которых под углом расположены гидроцилиндры, при этом все П-образные стойки соединены сверху между собой двумя продольными перекладинами, образующими общий каркас устройства фиксации, и имеют направляющий П-образный профиль, расположенный между параллельными вертикальными стойками, установленный пазом вниз, а рычаги захватов, со стороны их установки на перекладине П-образных стоек, имеют вертикально установленный направляющий ролик с подшипником на конце с вертикальной осью, проходящей по центру паза направляющего П-образного профиля.
Это достигается тем, что механизм перемещения ствола установки для поперечного раскроя ствола на чураки, содержащий два транспортера с приводами, сверху которых вдоль рам расположены рябухи, концы валов которых расположены в шарикоподшипниковых узлах и выполнены с одной стороны удлиненными с установленными на них парными звездочками, соединенными между собой цепью, при этом одна рябуха транспортера расположена на кронштейне, установленном с возможностью поворота вниз, при этом механизм перемещения является одновременно столом раскроя и распилочным столом установки поперечного раскроя, на котором полностью размещается ствол, а один из транспортеров предназначен для удаления чураков, транспортеры установлены на одной общей раме, а рябуха, установленная с возможностью поворота вниз, расположена первой на подающем транспортере и позволяет получить сразу несколько чураков с одновременной торцовкой ствола с двух сторон, за счет установки режущих органов в плоскостях реза.
Это достигается тем, что установка для поперечного раскроя ствола на чураки (вариант), содержащая механизм перемещения ствола за счет вращающихся рябух в виде подающего транспортера с откидным кронштейном и принимающего транспортера с устройством отмера, устройства фиксации ствола и пильный механизм, при этом установка содержит неразъемный каркас, выполненный в виде силовой рамы, на которой установлены устройства фиксации, с подающего и принимающего транспортеров и две стойки устройства отмера, выполненного в виде упора с демпфером, содержащим треугольную пластину, демпфера и симметрично относительно вертикальной линии, проходящей через продольную ось симметрии механизма перемещения ствола, при этом режущий орган пильного механизма расположен между устройствами фиксации ствола, при этом механизм перемещения состоит из двух продольных транспортеров, подающего стволы транспортера и удаляющего чураки транспортера, которые расположены на одной раме и на одной линии перемещения ствола, и является одновременно столом раскроя и распилочным столом установки, на котором полностью размещается ствол, при этом на откидном кронштейне размещена первая рябуха, принимающая ствол, а устройство отмера расположено в конце механизма перемещения и служит упором для переднего торца ствола и размещения ствола на механизме перемещения для получения нескольких чураков с одновременной торцовкой ствола с двух сторон, а устройство фиксации состоит из шести П-образных стоек, образующих общий каркас фиксации установки, с двух сторон которого и между парными П-образными стойками расположены пильные механизмы на силовой раме установки, режущие органы которых перемещаются в плоскостях реза согласно схеме раскроя за счет гидроцилиндров, при этом каждый пильный механизмы состоит из режущего органа цепной пилы с электродвигателем, конец выходного вала которого через сцепление соединен с пильным валом вращения режущего органа, установленного с возможностью его поворота в плоскости реза на угол поворота, равный менее 80 градусов, при этом ось пильного вала режущего органа находится несколько ниже горизонтальной плоскости, в которой расположены оси вала вращения рябух.
На фиг. 1 представлен общий вид установки в плане.
На фиг. 2 - вид сверху на механизм перемещения (в изометрии).
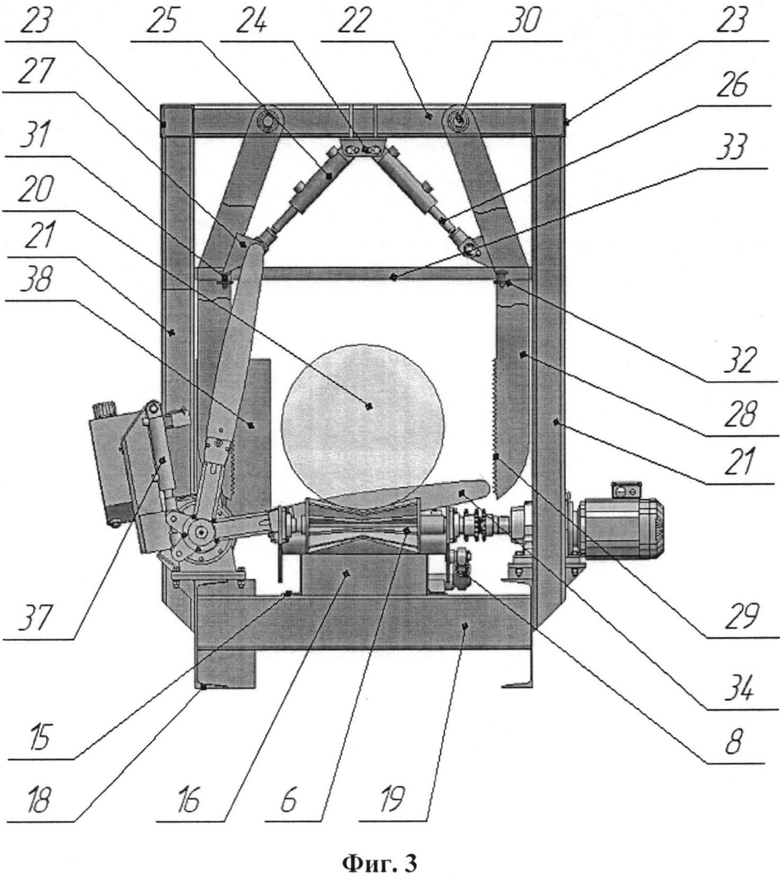
На фиг. 3 - вид сбоку по стрелке А с вырывом для просмотра второй пары рычагов захвата.
На фиг. 4 показана схема раскроя ствола.
Установка поперечного раскроя ствола на чураки состоит из механизма перемещения 1, устройства фиксации 2 и четырех пильных механизмов 3.
Механизм перемещения 1 (см. фиг. 2) состоит из двух продольных транспортеров, выполненных в виде подающего стволы транспортера 4 и удаляющего чураки транспортера 5, которые расположены на одной линии перемещения ствола, и является одновременно столом раскроя и распилочным столом установки, на котором полностью размещается ствол.
Подающий стволы транспортер 4 состоит из девяти рябух 6, одна из которых, первая по ходу движения ствола, расположена на откидывающемся кронштейне 7 при помощи гидроцилиндра 8 (см. фиг. 3). С фронтальной стороны установки, противоположной стороне расположения оператора, все выступающие концы вала 9 (см. фиг. 2) рябух 6 сделаны удлиненными. На большинство из них насажены парные звездочки 10, а на два крайних удлиненных вала 9 рябух 6 насажены одинарные звездочки. Это на первую принимающую рябуху 6, а также на последнюю, на которой установлен редуктор 11, совмещенный с приводом 12.
Удаляющий чураки транспортер 5 состоит из четырех рябух 6, на два крайних удлиненных вала 9 которых насажены одинарные звездочки, а на рябухах между ними насажены парные звездочки 10. На удлиненный вал 9 последней рябухи 6 этого транспортера по ходу движения ствола установлен редуктор 13, совмещенный с разгонным приводом 14.
Подающий стволы транспортер 4 и удаляющий чураки транспортер 5 расположены по ходу движения ствола на одной общей раме, которая состоит из двух параллельно расположенных перекладин 15 с поперечинами 16. Сверху перекладин 15 с определенным шагом вдоль направления движения ствола, совпадающего со стрелкой А, установлены шарикоподшипниковые узлы 17, в которых расположены выступающие концы вала 9 рябух 6.
Механизм перемещения 1 расположен сверху на силовой раме установки поперечного раскроя, состоящей из двух параллельно расположенных перекладин 18 (см. фиг. 3) с поперечинами 19 между ними.
На этой силовой раме установки поперечного раскроя над подающим стволы транспортером 4 расположены две пары (см. фиг. 1) П-образных стоек устройства фиксации 2, над удаляющим чураки транспортером 5 расположена одна пара П-образных стоек устройства фиксации 2 ствола 20, имеющие одинаковую конструкцию.
Устройство фиксации 2 состоит из шести П-образных стоек, каждая из которых включает две вертикально установленные стойки 21 (см. фиг. 3) с поперечной перекладиной 22 сверху, и соединены сверху между собой двумя общими продольными перекладинами 23, образующими общий каркас фиксации установки. Стойки 21 снизу соединены с перекладинами 18 силовой рамы установки и расположены в перпендикулярной плоскости к направлению движения ствола 20. Они расположены в определенной зависимости и в жесткой связи с расположением пильных механизмов 3 и расположением транспортеров 4 и 5. Каждая пара П-образных стоек устройства фиксации 2 имеет взаимосвязь продольных размеров размещения их между собой и другими элементами конструкции установки поперечного раскроя. Расчетными являются и высота П-образных стоек, и расстояние между парными П-образными стойками, которые влияют на длину продольных перекладин 23 и зависят от длины чурака и его диаметра в комле. На каждой поперечной перекладине 22 П-образной стойки снизу в средней части симметрично расположены кронштейны 24 с элементами узла стыковки гидроцилиндров 25. Штоки 26 гидроцилиндров 25 расположены под углом вниз и соединены шарнирным соединением 27 с рычагами захвата 28, установленными сверху на поперечной перекладине 22 П-образной стойки между кронштейнами 24 и вертикальными стойками 21. Рычаги захвата 28 выполнены в виде плоской полосы, верхняя короткая часть которой выполнена под тупым углом к удлиненной части, на которой имеются зазубрины 29, обращенные во внутрь П-образной стойки в сторону расположения ствола. Рычаги захвата 28 расположены на поперечной перекладине 22 П-образной стойки с возможностью ограниченного вращения вокруг осей 30 их установки в плоскости, перпендикулярной продольному перемещению хлыста или ствола, а также длинномерного бревна.
Чтобы обеспечить перемещение рычагов захвата 28 в виде ограниченного их вращения вокруг осей 30 в плоскости, перпендикулярной продольному перемещению ствола, на рычагах захватов 28 под шарнирным соединением 27 со стороны их установки расположен направляющий ролик 31 с подшипником, отстоящий от плоскости перемещения рычагов захвата 28 на треугольной пластине 32 на некоторую величину. Эта величина определяется пазом направляющего П-образного профиля 33, в котором перемещается направляющий ролик 31 с подшипником, в котором они перемещаются параллельно и совместно с рычагом захвата 28. Направляющий П-образный профиль 33 расположен между параллельными вертикальными стойками 21 пазом вниз на каждой П-образной стойке.
Каждый пильный механизм 3 (см. фиг. 1, 3) расположен со стороны оператора сверху на перекладине 18 силовой рамы установки с двух сторон общего каркаса фиксации и между парными П-образными стойками устройства фиксации 2, образуя четыре плоскости реза.
Пильный механизм 3 состоит из режущего органа 34 цепной пилы с электродвигателем 35, конец выходного вала которого через сцепление соединен с пильным валом вращения режущего органа 34, установленного с возможностью его поворота в плоскости реза на угол поворота, равный менее 80 градусов. При этом перекладина 18 силовой рамы установки является установочным элементом для всех четырех пильных механизмов 3. Режущий орган 34 пильного механизма 3 состоит из шины и цепи, перемещающейся в пазу шины за счет вращения ведущей звездочки совместно с пильным валом. Режущий орган 34 может иметь смазочный узел 36 как в составе цепной пилы, так и отдельного смазочного узла 36, установленного на силовой раме или на стойках 21 устройства фиксации 2.
Пильные механизмы 3 установлены таким образом, чтобы ось пильного вала режущего органа 34 находилась несколько ниже горизонтальной плоскости, в которой расположены оси вала вращения рябух 6. Для этого пильные механизмы 3 размещены на перекладине 18 с возможностью регулировки расположения оси пильного вала режущего органа 34 за счет установочных подкладок между основанием пильного механизма 3 и перекладины 18. Пильные механизмы 3 расположены таким образом, чтобы их режущие органы 34 при надвигании находились в плоскости реза.
Пильные механизмы 3 установлены с промежутками вдоль перекладины 18 таким образом, чтобы получилось три чурака требуемой длины, и ствол имел в общем виде следующую схему раскроя ствола, показанную на фиг. 4, которая определяется пятью отрезками ствола, три из которых являются чураками, поступающими на оцилиндровку. Таким образом,

Где Lств - длина ствола, ΔLнос - длина начального отрезка ствола, Lч1 - длина первого чурака, Lч2 - длина второго чурака, Lч3 - длина третьего чурака, а ΔLкос - длина конечного отрезка ствола.
I, II, III и IV - следы плоскости реза, соответственно первого, второго, третьего и четвертого пильного механизма 3. В нашем случае плоскость реза перпендикулярна направлению движения ствола и в этой плоскости перемещается, надвигаясь на ствол, режущий орган 34. Между плоскостями реза расположено определенное количество рябух 6, в нашем случае, по четыре. Они расположены таким образом, чтобы первый по ходу движения ствола чурак длиной, равной Lч1, полностью находился на удаляющем чураки транспортере 5 или иначе разгонном транспортере, а два остальных длиной, равной Lч2 и Lч3, на подающем стволы транспортере 4 механизма перемещения 1.
Способ поперечного раскроя ствола на чураки осуществляется следующим образом. Ствол 20 по продольному конвейеру перемещения ствола от раскаточного стола со скоростью Vпкпс поступает на первую рябуху 6, установленную на откидывающемся кронштейне 7 на подающем стволы транспортере 4 механизма перемещения 1. В это время рябуха 6 на откидывающемся кронштейне 16 находится в исходном состоянии, т.е. ось вала этой рябухи находится в горизонтальной плоскости, в которой находятся все оси других рябух 6 механизма перемещения 1.
Включается привод 12, редуктор 11 которого вращает совмещенную с ним рябуху и от которой вращаются остальные восемь рябух, соединенных цепной передачей, включая рябуху, установленную на откидывающемся кронштейне 7. Начинается движение ствола по подающему стволы транспортеру 4. При этом скорость ωпст вращения указанных рябух подающего стволы транспортера 4 от привода 12 несколько превышает скорость вращения ωпкпс рябух продольного конвейера перемещения ствола от раскаточного стола. Поэтому скорость движения Vпст ствола на подающем стволы транспортере 4 несколько превышает скорость движения Vпкпс ствола на продольном конвейере перемещения ствола от раскаточного стола, обеспечивая тем самым гарантированный зазор между стволом, поступающим на стол раскроя, которым является механизм перемещения 1, и стволом, следующим за ним. Т.е. тем самым создаются условия, при которых ωпст>ωпкпс, следовательно, Vпст>Vпкпс: где
ωпст - скорость вращения рябух подающего стволы транспортера 4, об/мин;
ωпкпс - скорость вращения рябух продольного конвейера перемещения ствола от раскаточного стола, об/мин;
Vпкпс - скорость перемещения ствола по продольному конвейеру от раскаточного стола до механизма перемещения установки, м/мин;
Vпст - скорость перемещения ствола по механизму перемещения 1 установки, м/мин.
Движение ствола по механизму перемещения 1 установки продолжается до его полного размещения на нем согласно определенной (выбранной) схеме его раскроя. Схема раскроя влияет на расположение пильных механизмов вдоль ствола, и в нашем случае они расположены таким образом, чтобы получилось три чурака требуемой длины и ствол имел в общем виде следующую схему раскроя, показанную на фиг. 3, и определялся пятью отрезками ствола, три из которых являются чураками, поступающими на оцилиндровку. Таким образом, схема раскроя ствола соответствует формуле (1).
Ствол 20 перемещается по механизму перемещения 1 установки до выхода передней торцевой части ствола 20 за пределы первой плоскости реза I. При этом задняя торцевая часть ствола 20 не должна переместиться за пределы четвертой плоскости реза. Таким образом, ствол располагается по всей длине механизма перемещения 1 и на всех его тринадцати рябухах 6 с выступающими концами ствола за пределами крайних плоскостей реза в соответствии со схемой раскроя.
Как только перемещение ствола устанавливается в пределах схемы раскроя, перемещение ствола прекращается с отключением работы привода 12 и привода продольного конвейера перемещения ствола от раскаточного стола. Ствол останавливается, и останавливаются стволы, следующие за ним с расчетным зазором между ним и следующим стволом. Подается давление на гидроцилиндр 8, и первая рябуха 6, установленная на откидывающемся кронштейне 16, опускается вниз. Тем самым ствол располагается на двенадцати рябухах 6 механизма перемещения 1 в состоянии покоя.
Затем производится фиксация ствола без нарушения состояния покоя, которая осуществляется следующим образом. Фиксация ствола производится следующим способом. Подается давление на гидроцилиндры 25, и штоки 26 начинают втягиваться, перемещая рычаги захвата 28 в сторону неподвижно лежащего ствола, вращением их вокруг оси 30, расположенной горизонтально в вертикальной плоскости, параллельной направлению движения ствола. Когда один из двух рычагов захвата 28 любого устройства фиксации 2 касается ствола, то его перемещение прекращается, а второй рычаг захвата 28 продолжает движение в сторону ствола до касания им ствола с другой стороны ствола, и далее происходит окончательная фиксация ствола с двух его сторон заданным усилием. При этом захватывающая часть рычагов захвата 28, имеющая зазубрины 29, производит захват ствола ниже его осевой линии. Тем самым фиксация ствола осуществляется без создания напряжений в каждой плоскости реза (пропила). Такая фиксация осуществляется каждой парой рычагов захвата 28 и поэтому не создаются напряжения от действия рычагов захвата 2, а попарное расположение рычагов захвата между плоскостями реза снимает воздействие их веса на пилу пильного механизма 3, предотвращая заклинивание последних в плоскости пропила.
После фиксации ствола включаются электродвигатели 35 (см. фиг. 1). Цепные пилы начинают вращение в пазу шины режущего органа 34 (см. фиг. 3). Затем подается давление в цилиндры поворотов 37 цепных пил всех режущих органов 34 и производится надвигание их на ствол в плоскости реза. Надвигание режущего органа 34 производится поворотом шины режущего органа 34 в плоскости реза вокруг оси вращения ведущей звездочки цепной пилы вниз до окончательного пропила ствола во всех четырех плоскостях реза. Затем производится установка режущих органов 34 в исходное положение, путем подъема их вверх. При этом крайние участки ствола в виде отрезков длиной ΔLнос и ΔLкос самопроизвольно падают вниз, освобождая механизм перемещения 1 установки поперечного раскроя от их дальнейшего перемещения, а готовые чураки длиной Lч1, Lч2 и Lч3 остаются на нем, каждый из которых зафиксирован парными П-образными стойками устройства фиксации 2. В нашем случае они все равны. Отрезки длиной ΔLнос и ΔLкос являются дровяными остатками и падают вниз в специальные контейнеры (не показан), установленные под проемами между механизмом перемещения 1 и общими линиями перемещения чураков и стволов, которые после наполнения меняются на порожние.
Подается обратное давление на гидроцилиндры 25, и штоки 26 раздвигают захваты 28, перемещая их в исходное состояние, освобождая чураки от фиксации.
Подается обратное давление на гидроцилиндр 8, и первая рябуха 6, установленная на откидывающемся кронштейне 7, занимает исходное положение.
Включаются приводы 14, 12 и привод продольного конвейера перемещения ствола от раскаточного стола. Начинается перемещение чураков и удаление их с установки поперечного раскроя с одновременным перемещением следующего ствола и размещением его на механизме перемещения 1 согласно схеме раскроя.
Когда включается привод 14, редуктор 13 вращает совмещенную с ним рябуху, от которой, соединенные цепной передачей, вращаются остальные три рябухи удаляющего чураки транспортера 5. При этом скорость ωучт вращения указанных рябух удаляющего чураки транспортера 5 несколько превышает скорость ωпст вращения рябух подающего стволы транспортера 4 от привода 12. Поэтому скорость движения Vучт удаляющегося чурака несколько превышает скорость движения Vпст двух следующих чураков, расположенных на подающем стволы транспортере 4. Тем самым обеспечивается увеличенный гарантированный зазор между первым удаляющимся чураком и вторым чураком, перемещающимся за ним. Т.е. тем самым создаются условия, при которых ωпст>ωпкпс, следовательно, Vч1>Vч2 (1), где:
ωучт - скорость вращения рябух удаляющего чураки транспортера 5;
ωпст - скорость вращения рябух подающего стволы транспортера 4;
Vучт - скорость перемещения чурака на удаляющем чураки транспортере 5;
Vпст - скорость перемещения чурака на подающем стволы транспортере 4;
Vч1 - скорость перемещения первого чурака;
Vч2(1) - скорость перемещения второго чурака, перемещающегося за первым чураком, покидающим установку.
Когда второй чурак окажется на месте первого чурака, то он окажется на удаляющем чураки транспортере 5, у которого скорость вращения рябух от редуктора 13 привода 14 будет равняться ωучт. Третий в это время окажется на месте второго, у которого скорость вращения рябух от редуктора 11 привода 12 будет равняться ωпст.
Тем самым обеспечивается увеличенный гарантированный зазор между вторым удаляющимся чураком и третьим чураком, перемещающимся за ним. А раз для этой пары чураков наступили условия, при которых ωпст>ωпкпс, то, следовательно, Vч2(2)>Vч3: где
Vч3 - скорость перемещения третьего чурака;
Vч2(2) - скорость перемещения второго чурака на удаляющем чураки транспортере 5.
При этом скорость Vч2(1) в этом случае превышает скорость Vч2(2) в предыдущем случае. Это обстоятельство связано с тем, что первый чурак после его получения пропилом всегда находится на удаляющем чураки транспортере 5, на котором чурак движется со скоростью, равной Vучт. Последующие чураки после их получения - второй, третий и n чурак - всегда находятся на подающем стволы транспортере 4, на котором они движутся со скоростью, равной Vпст. При этом скорость перемещения каждого чурака, следующего за чураком, покидающим установку поперечного раскроя, будет ускоренной и увеличиваться от скорости Vпст до Vучт. Таким образом, скорость перемещения второго чурака Vч2(1)>Vч2(2), где n>2 и равняется 2, и равняется 3…n.
Одновременно второй и третий чураки перемещаются по подающему стволы транспортеру 4 и поочередно поступают на удаляющий чураки транспортер 5, перемещаются по нему и в дальнейшем удаляются с него тоже. Как только последний, в нашем случае третий, чурак покидает установку поперечного раскроя, выключается привод 14.
Одновременно с перемещением первого чурака следующий ствол начинает движение по продольному конвейеру, перемещающему ствол, и поступает на первую рябуху 6, установленную на откидывающемся кронштейне 7. Далее процесс повторяется.
Установка поперечного раскроя ствола на чураки изготавливается из разнообразного стального профиля марки Ст.3, в основном труб прямоугольного сечения, листа, швеллера, уголков и представляет собой сварную каркасную конструкцию, удобную для монтажа, профилактического осмотра с обеспечением доступа к основным узлам и механизмам.
Конкретная реализация изготовления и сборки установки поперечного раскроя будет показана на примере разделки поступающих стволов диаметром до ⌀=700.0 мм и длиной в пределах 5600 мм для изготовления из них трех чураков длиной 1690 мм.
Поэтому габариты установки поперечного раскроя ствола зависят в основном от длины поступающих стволов и их диаметра. В этой связи формируются габариты механизма перемещения 1 и размеров П-образных стоек 21 устройства фиксации 2. Так две перекладины 18 (см. фиг. 2) силовой рамы установки выполнены из швеллера №36 длиной 5700 мм, расположены стенками наружу и связаны между собой шестью поперечинами 19, изготовленными в виде отрезков прямоугольных труб 100×200 мм с толщиной стенки 4,0 мм, образующих в плане прямоугольную силовую раму установки шириной 1240 мм с выступающими концами швеллера №36 за габаритные размеры этой силовой рамы. Сверху силовой рамы с помощью сварки крепят раму механизма перемещения 1, которая изготавливается из двух параллельно расположенных перекладин 15, выполненных из швеллеров №10 длиной 5000 мм, расположенных полками наружу и связанных между собой шестью поперечинами 16, изготовленными в виде отрезков прямоугольных труб 100×200 мм длиной 460 мм, образующих в плане прямоугольную раму с выступающими концами швеллера №10 за габаритные размеры этой рамы.
Затем с внешней стороны перекладин 18 устанавливают и крепят при помощи сварки каркас из шести П-образных стоек устройства фиксации 2 установки, который изготавливают из отрезков прямоугольных труб 120×120 мм. Длина каркаса равна длине продольной перекладины 23 и составляет 4220 мм, а высота каркаса над верхним уровнем силовой рамы установки имеет высоту 1700 мм, при высоте стоек 21, равной 1800 мм.
При этом каждая пара П-образных стоек в плане образует раму с габаритными размерами 820×1480 мм, а всех шести П-образных стоек с двумя перекладинами 18-4220×1480 мм. Таким образом, на силовой раме неразъемным соединением установлен общий каркас устройства фиксации 2.
Затем на раме механизма перемещения 1, которая является общей рамой для подающего стволы транспортера 4 и удаляющего чураки транспортера 5, формируют эта транспортеры, устанавливая на раме двенадцать рябух 6 в сборе с подшипниковыми узлами 17 и парными звездочками 10. При этом восемь из двенадцати подшипниковых узлов 17 принадлежат подающему стволы транспортеру 4, а остальные четыре - удаляющему чураки транспортеру 5. В качестве подшипниковых узлов 17 был установлен подшипниковый узел SYJ 80 TF фирмы "SKF”. При этом первая дополнительная рябуха 6 от начала перемещения ствола по подающему стволы транспортеру 4 устанавливается на откидывающемся вниз кронштейне 7 при помощи гидроцилиндра 8. В качестве гидроцилиндра 8 можно установить гидроцилиндр типа ГТЦ 16-1-2-2-50-32.000-32.300.
Вращение рябух 6 подающего стволы транспортера 4 и удаляющего чураки транспортера 5 осуществляется соответственно за счет установки привода 12 с редукторами 11 и привода 14 с редукторами 13, работающих автономно, и парных звездочек 10, соединенных со смежными звездочками 10 установленных рябух.
Цепи соединения смежных рябух на представленных фигурах не показаны. Приводы 12 и 14 устанавливаются на перекладине 18 со стороны удлиненного вала 9, который вставляется в отверстие соответствующего редуктора. При этом приводы 12 и 14 с редукторами 12 и 13 устанавливаются на удлиненных валах 9 последних рябух подающего стволы транспортера 4 и удаляющего чураки транспортера 5, соответственно.
В качестве привода 12 и 14 можно использовать мотор-редуктор SEW Eirodrive R77DRS 112M4/AL, N4 кВт, n=92 об/мин.
Таким образом, изготавливается и собирается, как подающий стволы транспортер 4, так и удаляющий чураки транспортер 5 механизма перемещения 1 и сам механизм перемещения 1.
Изготовление устройства фиксации 2 включает сборку на каждой П-образной стойке общего каркаса всех его элементов. Для этого в перекладинах 22 высверливают по два сквозных отверстия диаметром ⌀=50,0 мм под установку осей 30 для установки двух рычагов захвата 28 с внешней стороны парных П-образных стоек. Рычаги захватов 28 изготавливают из листовой стали толщиной 20,0 мм, и на удлиненной его части делают зазубрины 29. На свободном конце укороченной части высверливают отверстие диаметром ⌀=50,0 мм под установку их при помощи осей 30 в отверстиях перекладины 22. При помощи приваренных проушин формируют в конце укороченной части шарнирные соединения 27 под ответное соединение их со штоками 26 гидроцилиндров 25, которые устанавливают в шарнирные соединения кронштейнов 24 на перекладине 22. Под шарнирным соединением 27 рычагов захватов 28 со стороны их крепления к перекладине 22 на удлиненной части рычагов захвата расположен направляющий ролик 31 в виде выступа с подшипником на конце. На расстоянии 470.0 мм от перекладины 22 вниз между параллельными вертикальными стойками 21 П-образных стоек при помощи сварки устанавливают направляющий П-образный профиль 33 с глубиной паза 46.0 мм и длиной 1240 мм. В этом пазу направляющего П-образного профиля 33 и перемещается направляющий ролик 31, не позволяя рычагам захвата 28 отклоняться от вертикальной плоскости, перпендикулярной направлению перемещения ствола при перемещении их для захвата ствола. Глубина паза 46.0 мм выбрана с учетом движения по радиусу и того, чтобы направляющий ролик 31 не выходил из этого паза при перемещении рычагов захватов 28 и не касался полки паза.
Направляющий ролик 31 устанавливается на треугольную пластину 32 толщиной 20.0 мм, приваренную основанием треугольника перпендикулярно к рычагу захвата 28. Треугольная пластина 32 располагается под шарнирным соединением 27 на удлиненной части рычага со стороны П-образной стойки в горизонтальной плоскости при расположении рычага захвата 28 в исходном положении. В вершине треугольника пластины 32, противоположного приваренному основанию, сделано отверстие для установки в нем в вертикальном положении направляющего ролика 31 с вертикальной осью, проходящей по центру паза направляющего П-образного профиля 33.
Теперь, если рычаг захвата 28 с направляющим роликом 31 в пазу направляющего П-образного профиля 33 установить на оси 30 поперечной перекладины 22, то в состоянии покоя ось оси 30 и центр тяжести рычага будут находиться в одной вертикальной плоскости, проходящей через горизонтальную ось оси 30, расположенную параллельно направлению движения ствола. Если при этом на установленный таким образом рычаг захвата 28 приложить распределенную нагрузку по направлению движения ствола, то направляющий ролик 31, расположенный в пазу направляющего П-образного профиля, будет препятствовать повороту оси 30 в вертикальной плоскости, чтобы выйти из горизонтальной плоскости, в которой расположена ось оси 30. Но если приложить нагрузку по направлению движения ствола, создающую поворот плоскости рычага захвата 28 от плоскости, перпендикулярной направлению движения ствола, то ось оси 30, находясь в горизонтальном положении, будет стремиться выйти из вертикальной плоскости, параллельной направлению движения ствола. Для устранения воздействия на ось 30 этой нагрузки необходимо установить второй ролик с расположением его в этом же пазу направляющего П-образного профиля 33 на некотором расстоянии от первого. Для этого вместо треугольной пластины 32 с одним направляющим роликом 31 можно установить трапецеидальную, установив ее большим основанием неразъемным соединением на рычаге захвата вместо треугольной пластины 32, а в двух углах меньшего основания установить два направляющих ролика 31, вертикальные оси которых лежат в плоскости, параллельной плоскости рычага захвата 28. Вместо трапецеидальной пластины можно установить ромбическую пластину, а направляющую П-образного профиля 33 можно изготовить из двух параллельно расположенных уголков, соединив их полки встык, таким образом, чтобы другие полки смотрели в одну сторону. Важно, чтобы нагрузки, возникающие при работе рычага захвата 28, не передавались на ось 30, установленную в отверстие поперечной перекладины 22, а воспринимались, например, дополнительными направляющими.
На П-образные стойки устройства фиксации устанавливают по два гидроцилиндра 25 типа ГТЦ 16.1.2.2-50-32.000-32.100.
Необходимо заметить, что одна из П-образных стоек может быть укороченной до направляющей П-образного профиля 33. Так в нашем примере показано, как были укорочены три первые вертикальные стойки 21 у парных П-образных стоек со стороны установки пильных механизмов.
Перед каждым пильным механизмом 3 по ходу движения ствола, в целях безопасности, устанавливаются экраны 38 на вертикальных держателях, расположенных на перекладине 18. На фиг. 3 первый экран 38 не показан, и поэтому хорошо виден пример установки пильного механизма на левой перекладине 18.
Высота расположения силовой рамы установки механизма перемещения 1 регулируется за счет подставок 39, высота которых и конструкция подстраиваются под общую линию перемещения имеющихся транспортеров перемещения стволов до установки поперечного раскроя стволов и после на линию перемещения чураков на оцилиндровку.
Установка может быть оснащена кабиной оператора с пультом управления или аппаратной с установкой персонального компьютера (не показаны).
В целях разгрузки оператора установка, как вариант, может быть оснащена ограничителем, установленным перед удаляющим чураки транспортером 5 механизма перемещения 1 на перекладинах 18. Для этой цели можно использовать треугольный демпфер на упорной перекладине, установленной в пазах, таким образом, чтобы в момент касания поступающего ствола он был перпендикулярен направлению движения ствола в месте начала образования начального отрезка ствола и соответствовал выбранной схеме раскроя. При отводе демпфера, т.е. его подъеме, каждая его точка перемещается не только вверх, но и по направлению движения от ствола в плоскости, расположенной под острым углом к плоскости, перпендикулярной направлению движения ствола.
Конструкция установки поперечного раскроя ствола на чураки и его устройства и механизмы могут быть дополнены усиливающими их элементами в виде косынок, распорок, накладок и т.д.
По сравнению с прототипом предложенный механизм перемещения имеет на одну рябуху меньше, отсутствует рама и площадка обслуживания пильного механизма с рамой надвигания режущего элемента в виде дисковой пилы, что значительно снижает металлоемкость и габариты установки. Предложенная установка позволяет использовать несколько пильных механизмов, а плоскость реза устанавливается расстановкой пильных механизмов для разделки ствола за одну установку. Повышается в три раза производительность установки поперечного раскроя стволов.
Рычаги захватов не будут выходить из плоскости реза, создавая нагрузки на оси, вокруг которых они вращаются.


Группа изобретений относится к деревообрабатывающей промышленности. Силовая рама установки состоит из перекладин (18) с поперечинами (19). Рама механизма перемещения состоит из перекладин (15) с поперечинами (16). Первая рябуха (6) расположена на откидывающемся кронштейне при помощи гидроцилиндра (8). Устройство фиксации ствола (20) состоит из П-образных стоек, включающих вертикальные стойки (21) с поперечной перекладиной (22). П-образные стойки соединены сверху продольными перекладинами (23). На каждой поперечной перекладине снизу расположены кронштейны (24) с элементами узла стыковки гидроцилиндров (25). Штоки (26) гидроцилиндров расположены под углом вниз и соединены шарнирным соединением (27) с рычагами захвата (28). Рычаги захвата с зазубринами (29) ограниченно вращаются вокруг осей (30). На рычагах захвата расположен направляющий ролик (31), который устанавливается на треугольную пластину (32) и перемещается в пазу П-образного профиля (33). Цепные пилы режущих органов (34) имеют цилиндры поворотов (37). Перед каждым пильным механизмом установлены экраны (38). Упрощается конструкция установки. 5 н.п. ф-лы, 4 ил.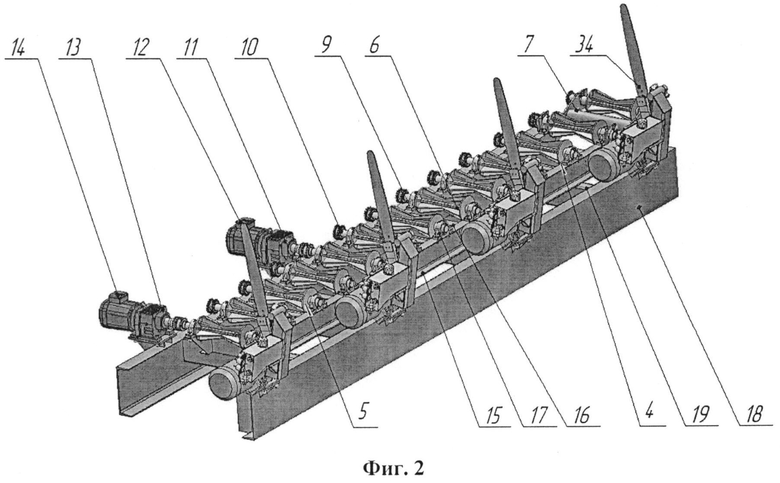
1. Способ поперечного раскроя ствола на чураки, при котором ствол с общего продольного конвейера поступает на механизм и движется по нему от вращающихся рябух к режущему органу пильного механизма, после чего производится остановка перемещения ствола на всем пути его движения с опусканием откидного кронштейна, затем производятся захват и фиксация ствола относительно места пропила пильного механизма, после чего включается электродвигатель пильного механизма, который вращает режущий орган пильного механизма с одновременной подачей давления на гидроцилиндр, который надвигает режущий орган пильного механизма на ствол в месте пропила на угол до получения полного пропила ствола, после чего осуществляется подъем режущего органа вверх на исходную позицию, и как только режущий орган занял исходную позицию, раздвигаются рычаги захватов и включаются все механизмы перемещения, отличающийся тем, что движение ствола по механизму перемещения продолжается до его полного размещения на нем согласно определенной схеме его раскроя таким образом, чтобы захват и фиксация ствола относительно места пропила соответствовали расстановке пильных механизмов в местах получения чураков и при установке всех режущих органов всех пильных механизмов в соответствующих плоскостях реза с остановкой перемещения ствола на всем пути его движения, после чего осуществляется захват ствола без нарушения состояния покоя, а надвигание режущего органа на ствол осуществляется всеми пильными механизмами до получения заданного количества чураков и двух остатков, самопроизвольно удаляющихся с механизма перемещения, после чего производятся подъем откидного кронштейна в исходное положение и установка рычагов захвата в исходное положение с последующим включением всех механизмов перемещения с одновременным последовательным удалением чураков с образованием гарантированных зазоров между ними, а также поступающим другим стволом и стволом, следующим за ним.
2. Установка для поперечного раскроя ствола на чураки, содержащая механизм перемещения ствола за счет вращающихся рябух в виде подающего транспортера с откидным кронштейном и принимающего транспортера с устройством отмера, устройства фиксации ствола и пильный механизм, при этом установка содержит неразъемный каркас, выполненный в виде силовой рамы, на которой установлены устройства фиксации, с подающего и принимающего транспортеров и две стойки устройства отмера, выполненного в виде упора с демпфером, содержащим треугольную пластину, демпфера и симметрично относительно вертикальной линии, проходящей через продольную ось симметрии механизма перемещения ствола, при этом режущий орган пильного механизма расположен между устройствами фиксации ствола, отличающаяся тем, что механизм перемещения состоит из двух продольных транспортеров, подающего стволы транспортера и удаляющего чураки транспортера, которые расположены на одной раме и на одной линии перемещения ствола, и является одновременно столом раскроя и распилочным столом установки, на котором полностью размещается ствол, при этом на откидном кронштейне размещена первая рябуха, принимающая ствол, а устройство отмера расположено в конце механизма перемещения и служит упором для переднего торца ствола и размещения ствола на механизме перемещения для получения нескольких чураков с одновременной торцовкой ствола с двух сторон, а устройство фиксации состоит из шести П-образных стоек, образующих общий каркас фиксации установки, с двух сторон которого и между парными П-образными стойками расположены пильные механизмы на силовой раме установки, режущие органы которых перемещаются в плоскостях реза согласно схеме раскроя за счет гидроцилиндров, при этом каждый пильный механизм состоит из режущего органа цепной пилы с электродвигателем, конец выходного вала которого через сцепление соединен с пильным валом вращения режущего органа, установленного с возможностью его поворота в плоскости реза на угол поворота, равный менее 80 градусов, при этом ось пильного вала режущего органа находится несколько ниже горизонтальной плоскости, в которой расположены оси вала вращения рябух.
3. Способ фиксации ствола, при котором захват и фиксация ствола относительно заданного размера и места пропила производятся подачей сигналов на гидроцилиндры рычагов захвата, расположенных с двух сторон П-образных стоек, между которыми размещен ствол в состоянии покоя, перемещением рычагов захвата по радиусу вокруг центра оси установки в сторону ствола, при этом захват ствола осуществляется ниже осевой линии ствола под небольшим углом, отличающийся тем, что захват ствола осуществляется по всей длине ствола с компенсацией возможного воздействия на перекос оси установки рычагов захвата в два этапа захвата, включающие последовательный подвод одного из рычагов захвата к стволу с одной стороны ствола до касания и остановки его до касания второго рычага с другой стороны с последующим одинаковым поджатием с двух сторон.
4. Устройство фиксации ствола установки для поперечного раскроя ствола на чураки, содержащее шарнирно установленные плоские рычаги захвата со свободными концами удлиненных частей с зазубринами, обращенных во внутрь П-образной стойки, совмещенных под тупым углом с короткими частями и с возможностью ограниченного вращения их в плоскости, перпендикулярной продольному перемещению ствола, с захватом ствола между зазубринами в нижней половине его диаметра, при этом устройство содержит расположенные перпендикулярно продольному перемещению ствола парные П-образные стойки, вертикально установленные на силовой раме установки, жестко соединенные между собой с разнесенными снизу кронштейнами на продольных перекладинах, на осях которых под углом расположены гидроцилиндры, отличающееся тем, что все П-образные стойки соединены сверху между собой двумя продольными перекладинами, образующими общий каркас устройства фиксации, и имеют направляющий П-образный профиль, расположенный между параллельными вертикальными стойками, установленный пазом вниз, а рычаги захватов со стороны их установки на перекладине П-образных стоек имеют вертикально установленный направляющий ролик с подшипником на конце с вертикальной осью, проходящей по центру паза направляющего П-образного профиля.
5. Механизм перемещения ствола установки для поперечного раскроя ствола на чураки, содержащий два транспортера с приводами, сверху которых вдоль рам расположены рябухи, концы валов которых расположены в шарикоподшипниковых узлах и выполнены с одной стороны удлиненными с установленными на них парными звездочками, соединенными между собой цепью, при этом одна рябуха транспортера расположена на кронштейне, установленном с возможностью поворота вниз, отличающийся тем, что механизм перемещения является одновременно столом раскроя и распилочным столом установки поперечного раскроя, на котором полностью размещается ствол, а один из транспортеров предназначен для удаления чураков, транспортеры установлены на одной общей раме, а рябуха, установленная с возможностью поворота вниз, расположена первой на подающем транспортере и позволяет получить сразу несколько чураков с одновременной торцовкой ствола с двух сторон, за счет установки режущих органов в плоскостях реза.
| УСТРОЙСТВО ДЛЯ ОТМЕРА ДЛИН, РАСКРЯЖЕВКИ И СОРТИРОВКИ ЛЕСОМАТЕРИАЛОВ | 1993 |
|
RU2060874C1 |
| Способ раскряжевки хлыстов на сортименты на установках с продольной подачей | 1980 |
|
SU1025324A3 |
| Приемное устройство для групповой распиловки лесоматериалов | 1991 |
|
SU1801741A1 |
| Устройство для измерения внутреннего сопротивления конденсатора | 1988 |
|
SU1567999A1 |
| US 4009630 A1, 01.03.1977.. | |||

