Изобретение относится к машиностроению, а именно к элементам конструкции манипуляторов для автоматизации различных производственных процессов.
Цель изобретения - расширение технологических возможностей за счет увеличения рабочей зоны.
На фиг. 1 изображена кинематическая схема модуля; на фиг. 2 - узел I на фиг. 1.
Модуль манипулятора состоит из корпуса 1, в котором с возможностью вращения вокруг своей оси смонтированы телескопически расположенные стаканы 2, которые зафиксированы от взаимного поворота с помощью шпоночных соединений 3, связаны через управляемую зубчатую муфту 4 сцепления с приводом 5 и закреплены на корпусе 1, при этом зубчатые диски А и Б муфты установлены соответственно на винте 6 винтовой передачи и в корпусе 1 с возможностью осевого перемещения от электромагнитных устройств 7 и 8.
Гайка винтовой передачи состоит из телескопических звеньев 9, на наружных поверхностях которых, кроме наружного звена, выполнена резьба, а на внутренних - участки с кольцевыми канавками длиной, равной длине роликов 10, имеющих кольцевые нарезки с тем же щагом и расположенных в сепараторах 11, причем внутренние части торцов сепараторов выполнены коническими и взаимодействуют с упорными кольцами 12, установленными на концах резьбовой нарезки на винте 6 и звеньях 9.
Модуль манипулятора работает следую- щ им образом.
Для осуществления линейного перемещения выходного звена 9 срабатывают устройства 7 и 8 и зубчатый диск А выходит из зацепления со стаканом 2, а диск Б входит. Вращение винта 6 преобразуется в планетарное движение роликов 10 и далее в поступательное перемещение телескопического звена 9 до тех пор, пока сепаратор 11 не достигнет кольца 12, после чего данная пара начинает вращаться и происходит выдвижение следующего телескопического звена.
Для осуществления вращения выходного звена 9 зубчатый диск Б выводится из зацепления со стаканом 2, а диск вводится, при этом вращение от привода 5 через зуб- чатый диск А передается на стаканы 2 и далее на звено 9.
0
5
0
5
0
5
0
Формула изобретения
Модуль манипулятора, содержащий корпус, размещенную в нем винтовую передачу, гайка которой имеет возможность вращательного и поступательного относительно корпуса перемещений, и привод, связанный с винтом указанной вин говой передачи посредством муфты сцепления,огл«чаюи4 ся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны, гайка винтовой передачи выполнена в виде ряда телескопических звеньев, на наружных поверхностях которых, кроме наружного звена, выполнена резьба и закреплены упорные кольца, а на внутренних поверхностях этих звеньев выполнены кольцевые канавки и на винте также закреплены упорные кольца, при этом кинематическая связь указанных звеньев гайки и винта осуществляется посредством дополнительно введенных роликов с кольцевыми нарезками, установленных в сепараторах и взаимодействующих своими кольцевыми нарезками с указанными кольцевыми канавками звеньев гайки и с резьбами винта и соответствующего звена гайки, при этом сепараторы взаимодействуют с упорными кольцами соответственно винта или звеньев гайки, и, кроме того, наружное звено гайки винтовой передачи связано с корпусом посредством дополнительных телескопически расположенных стаканов, при этом каждый последующий стакан связан с предыдущим с возможностью только осевого смещения, а все стаканы смонтированы с возможностью их совместного вращения относительно корпуса, причем наружный стакан смонтирован в корпусе с возможностью жесткой связи с ним или с винтом винтовой передачи посредством упомянутой муфты сцепления.
рие.2
Составитель С. Вильчн.гский
Редактор Е. КопчаТехред И. ВоресКорректор Л. Пилипенко
Заказ 3523/17Тираж 951Подписное
ВНИИПИ Государственного комитета СССР но делам изобретений и открытий
1 13035, Москва, Ж--35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1986 |
|
SU1423366A1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| Устройство для привода скважинного штангового насоса | 1990 |
|
SU1809863A3 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| Ротор для механической обработки заготовок | 1973 |
|
SU442043A1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2298714C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ВИНТОВОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1993 |
|
RU2082048C1 |
| Предохранительная фрикционная муфта | 1978 |
|
SU767426A1 |
| Муфта сцепления | 1976 |
|
SU725573A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ТОРМОЗНОЙ РЫЧАЖНОЙ ПЕРЕДАЧИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2650337C1 |
Изобретение относится к области машиностроения, а именно к элементам конструкции манипуляторов для автоматизации различных производственных процессов. Целью изобретения является расширение технологических возможностей за счет увеличения рабоче-й зоны. При соединении зуб. чатого диска Б с зубчатым венцом стакана 2 последний фиксируется относительно корпуса 1. Одновременно с этим выводится из зацепления со стаканом 2 диск А. При включении двигателя враш,ение винта 6 преобразуется в планетарное движение роликов 10 с кольцевыми нарезками, которые взаимодействуют с кольцевыми расточками на внутренней поверхности телескопической гайки 9 и осушествляют ее поступательное перемеш.ение до упора сепаратора 11 в кольцо 12, после чего данная пара начинает вра- шаться и происходит выдвижение следую- шего телескопического звена. Для ocymie- ствления враш,ения выходного звена 9 зубчатый диск Б выводится из зацепления со стаканом 2, а диск А вводится, при этом вран1ение от привода 5 передается на стакан 2 и далее через шпонки 3 на звено 9. 2 ил. «Q сл 72 9 со to со со Oi to / фиа1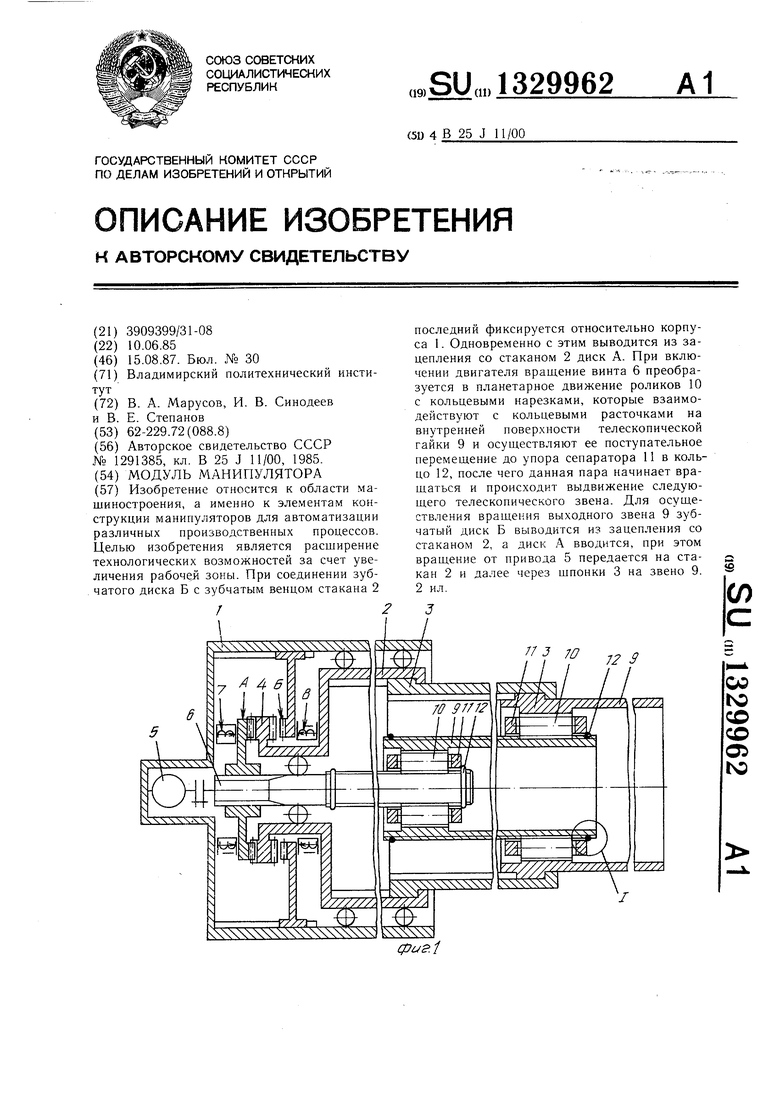
| Устройство для перемещения выходного звена манипулятора | 1985 |
|
SU1291385A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
