Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации и механизации технологических операций.
Цель изобретения - расширение технологических возможностей за счет обеспечения дополнительной степени подвижности.
На чертеже показано предлагаемое устройство.
но 10 вд оль оси устройства. Для осуществления поворота выходного звена 10 диск 7 соединяется с диском 6, при этом враш,ение от двигателя 5 передается на корпус 2 и далее на звено 10.
Формула изобретения
Устройство для перемеш,ения выходного звена манипулятора, содержашее основание.
Устройство содержит основание 1, на ко- Ю смонтированный на нем корпус и коаксиаль- тором с возможностью поворота относитель-но размещенные в корпусе внутреннее и проно него смонтирован корпус 2, в котором коаксиально размещены внутреннее 3 и промежуточное 4 звенья. В основании 1 закреплен привод 5, выходное поворотное звено которого жестко связано с звеном 3, на котором также смонтирована управляемая муфта сцепления, состоящая из диска 6, жестко связанного с звеном 3, и диска 7, смонтированного на указанном звене с возможностью перемещения вдоль его оси, при- 20 звено связано с внутренним посредством вин- чем на наружной поверхности диска 7 имеют- товой пары, содержащей тела качения, а с
15
межуточное звенья, образующие друг с другом и с корпусом винтовые пары, отличающееся тем, что, с целью расщирения технологических возможностей за счет обеспечения дополнительной степени подвижности, корпус смонтирован на основании с возможностью поворота относительно него, на внутренней поверхности корпуса со стороны основания выполнены пазы, промежуточное
ся выступы, входящие в продольные пазы о, выполненные в корпусе 2. Промежуточное звено 4 связано с внутренним посредством щарико-винтовой пары 9, а с корпусом - самотормозящей винтовой парой, причем на- правление витков указанных винтовых пар различное. Выходное звено 10 шарнирно связано с звеном 4 и предохраняется от поворота относительно корпуса 2 скалкой 11.
Устройство работает следующим образом.
Для линейного смещения звена 10 включается двигатель 5, а диск 7 соединяется с основанием 1. При этом корпус 2 затормаживается относительно основания, а вращение в винтовых парах перемещает зве
но 10 вд оль оси устройства. Для осуществления поворота выходного звена 10 диск 7 соединяется с диском 6, при этом враш,ение от двигателя 5 передается на корпус 2 и далее на звено 10.
Формула изобретения
смонтированный на нем корпус и коаксиаль- но размещенные в корпусе внутреннее и прозвено связано с внутренним посредством вин- товой пары, содержащей тела качения, а с
межуточное звенья, образующие друг с другом и с корпусом винтовые пары, отличающееся тем, что, с целью расщирения технологических возможностей за счет обеспечения дополнительной степени подвижности, корпус смонтирован на основании с возможностью поворота относительно него, на внутренней поверхности корпуса со стороны основания выполнены пазы, промежуточное
5
0
корпусом - самотормозящей винтовой парой, причем направление витков указанных винтовых пар различное, а в основании закреплен дополнительно введенный привод, поворотное выходное звено которого жестко связано с внутренним звеном, на котором также дополнительно смонтирована управляемая муфта сцепления, состоящая из двух дисков, один из которых жестко закреплен на внутреннем звене, а второй смонтирован с возможностью осевого перемещения вдоль этого звена и взаимодействия с основанием и первым диском, причем второй диск на наружной поверхности имеет выступы, размещенные в продольных пазах корпуса.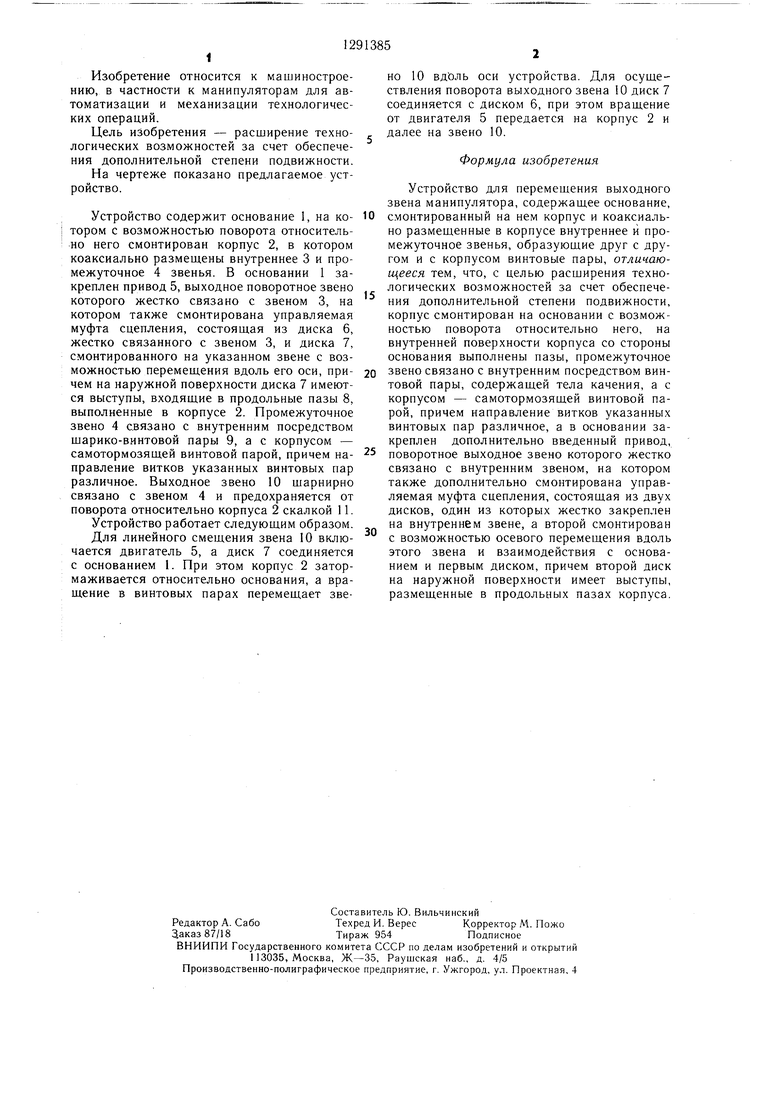
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1985 |
|
SU1329962A1 |
| Модуль манипулятора | 1986 |
|
SU1423366A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Регулировочная муфта, преимущественно главной линии стана периодической прокатки | 1980 |
|
SU944694A1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Манипулятор агрегатного типа | 1985 |
|
SU1293014A1 |
| Устройство для имитации сил резания на шпинделе металлорежущего станка | 1975 |
|
SU649981A1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| Устройство для передачи тарированного крутящего момента | 1974 |
|
SU752070A1 |
| Манипулятор | 1988 |
|
SU1548034A1 |
Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации и механизации технологических операций. Цель изобретения - расширение технологических возможностей за счет обеспечения дополнительной степени подвижности. На основании 1 с возможностью враш,ения смонтирован корпус 2, в котором коаксиально размешены внутреннее 3 и промежуточное 4 звенья. На звене 4 шар- нирно смонтировано выходное звено 10. Звенья 3 и 4 связаны между собой uja- рико-винтовой парой 9, а звено 4 с корпусом 2 - самотормозяшей винтовой парой, причем направление витков указанных винтовых пар различное. В основании 1 закреплен привод 5, выходное звено которого жестко связано со звеном 3, на котором также смонтирована управляемая муфта сцепления, диск 6 которой жестко связан со звеном 3, а диск 7 смонтирован на указанном звене с возможностью перемещения вдоль его оси, причем на наружной поверхности диска 7 имеются выступы, размешенные в продольных пазах 8 корпуса 2. 1 ил. lO (Л Ю со со 00 СП
| Механизм дифференциального винта для точной установки.-Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| Т.З., М.: Наука, 1979, с | |||
| Зеркальный стереовизир | 1922 |
|
SU382A1 |
| Пароводяной прерыватель электрического тока | 1916 |
|
SU2117A1 |
