9 6 А 10 д в 1 2 Ъ Л 1 ГЪ т 2 П12.1Ъ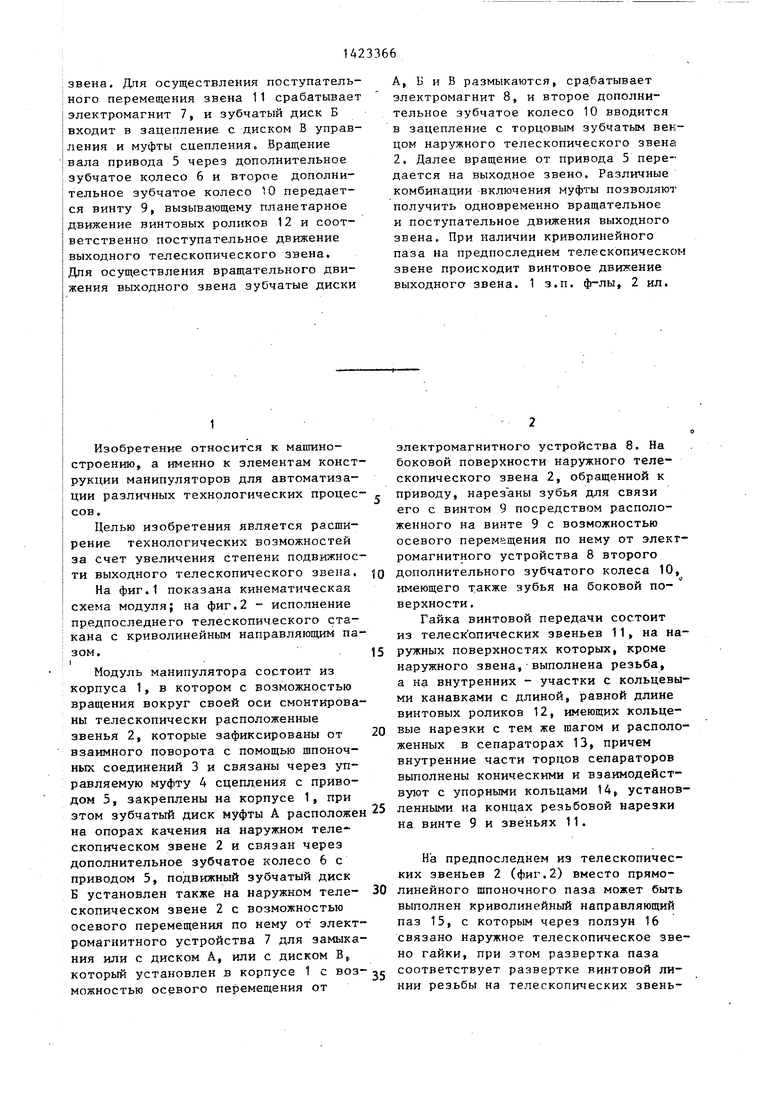
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1985 |
|
SU1329962A1 |
| Рука манипулятора | 1980 |
|
SU908587A1 |
| Револьверная головка | 1986 |
|
SU1351721A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| Модуль исполнительного органа манипулятора | 1985 |
|
SU1301689A1 |
| Механизм преобразования вращательного движения в возвратно-поступательное | 1986 |
|
SU1379533A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Манипулятор | 1982 |
|
SU1077782A1 |
| НАБЕДРЕННЫЙ ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО "ШПАГАТОВ" (ВАРИАНТЫ) | 2000 |
|
RU2211718C2 |
Изобретение относится к области машиностроения, а именно к элементам конструкции манипуляторов для автоматизации различных технологических процессов. Целью изобретения является расширение технологических возможностей за счет увеличения степени подвижности выходного телескопического
(Л
с
4;
ю
00 СА 05
сп
фие. 1
звена. Для осуществления поступательного перемещения звена 11 срабатывает электромагнит 7, и зубчатый диск Б входит в зацепление с диском В управления и муфты сцепления. Вращение вала привода 5 через дополнительное зубчатое колесо 6 и второе дополнительное зубчатое колесо 10 передается винту 9, вызывающему планетарное движение винтовых роликов 12 и соответственно поступательное движение выходного телескопического звена. Для осуществления вращательного движения вьтодного звена зубчатые диски
1
Изобретение относится к машиностроению, а именно к элементам конструкции манипуляторов для автоматизации различных технологических продес сов.
Целью изобретения является расширение технологических возможностей за счет увеличения степени подвижности выходного телескопического звена,
На фиг.1 показана кинематическая схема модуля; на фиг.2 - исполнение предпоследнего телескопического стакана с криволинейным направляющим пазом. I
Модуль манипулятора состоит из корпуса 1, в котором с возможностью вращения вокруг своей оси смонтированы телескопически расположенные звенья 2, которые зафиксированы от взаимного поворота с помощью щпоноч- ных соединений 3 и связаны через управляемую муфту 4 сцепл.ения с приводом 5, закреплены на корпусе 1, при этом зубчатый диск муфты А расположен на опорах качения на наружном теле- скопическом звене 2 и связан через дополнительное зубчатое колесо 6 с приводом 5, подвижный зубчатый диск Б установлен также на наружном теле- скопическом звене 2 с возможностью осевого перемещения по нему от электромагнитного устройства 7 для замыкания или с диском А, или с диском В, который установлен в корпусе 1 с воз- можностью осевого перемещения от
А, Б и В размыкаются, срабатывает электромагнит 8, и второе дополнительное зубчатое колесо 10 вводится в зацепление с торцовым зубчатым век- дом наружного телескопического ззека 2, Далее вращение от привода 5 передается на выходное звено. Различные комбинации включения муфты позволяют получить одновременно вращательное и поступательное движения выходного звена. При наличии криволинейного паза на предпоследнем телескопическом звене происходит винтовое движение выходного звена. 1 з.п, ф-лы, 2 ил.
электромагнитного устройства 8, На боковой поверхности наружного телескопического звена 2, обращенной к приводу, нарезаны зубья для связи его с винтом 9 посредством расположенного на винте 9 с возможностью осевого перемещения по нему от электромагнитного устройства 8 второго дополнительного зубчатого колеса 10, имеющего т.акже зубья на боковой поверхности.
Гайка винтовой передачи состоит из телескопических звеньев 11, на наружных поверхностях которых, кроме наружного звена, выполнена резьба, а на внутренних - участки с кольцевыми канавками с длиной, равной длине винтовых роликов 12, имеющих кольцевые нарезки с тем же шагом и расположенных в сепараторах 13, причем внутренние части торцов сепараторов выполнены коническими и взаимодействуют с упорными кольцами 14, установленными на концах резьбовой нарезки на винте 9 и звеньях 11.
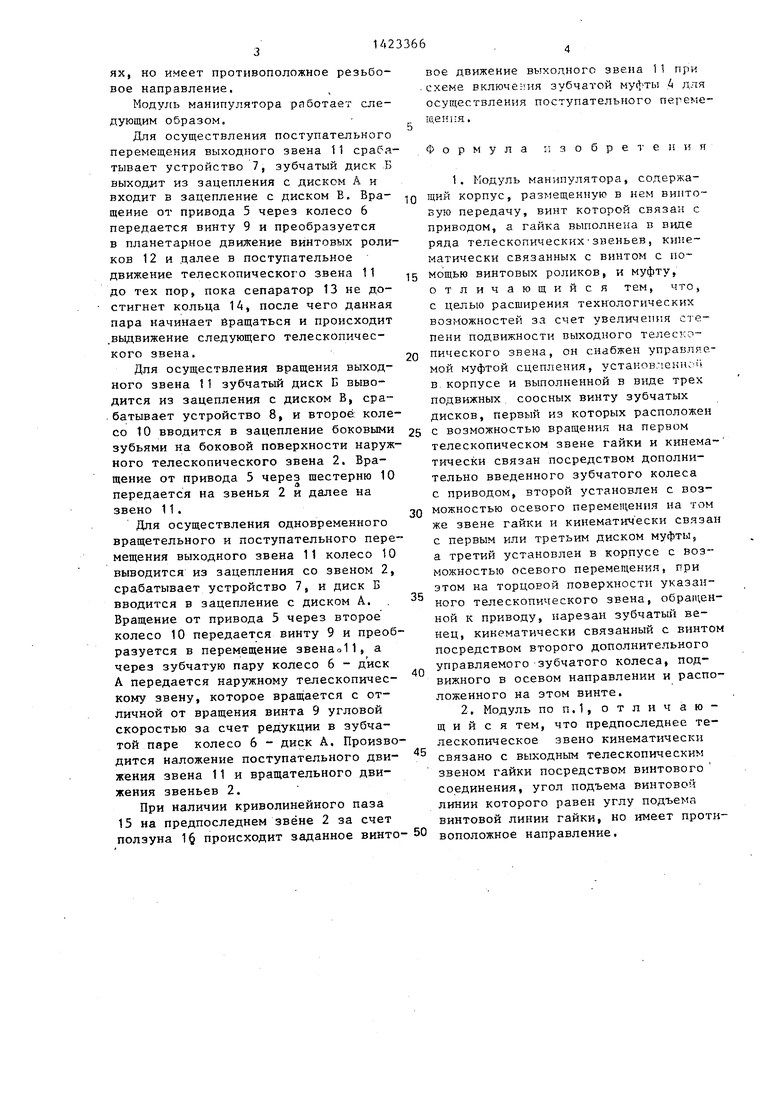
На предпоследнем из телескопических звеньев 2 (фиг.2) вместо прямолинейного шпоночного паза может быть выполнен криволинейный направляющий паз 15, с которым через ползун 16 связано наружное телескопическое звено гайки, при этом развертка паза соответствует развертке винтовой линии резьбы на телескопических звеньях, но имеет противоположное резьбовое направление.
Модуль манипулятора работает следующим образом,
Для осуществления поступательного перемещения выходного звена 11 срабатывает устройство 7, зубчатый диск Б выходит из зацепления с диском А и входит в зацепление с диском Е. Вращение от привода 5 через колесо 6 передается винту 9 и преобразуется в планетарное движение винтовых роликов 12 и далее в поступательное движение телескопического звена 11 до тех пор, пока сепаратор 13 не достигнет кольца 14, после чего данная пара начинает Вращаться и происходит .выдвижение следующего телескопического звена.
Для осуществления вращения выходного звена 11 зубчатый диск Б выводится из зацепления с диском В, срабатывает устройство 8, и второе: колесо 10 вводится в зацепление боковыми зубьями на боковой поверхности наружного телескопического звена 2. Вращение от привода 5 через шестерню 10 передается на звенья 2 и далее на звено 11.
Для осуществления одновременного вращательного и поступательного пере™ мещения выходного звена 11 колесо 10 выводится из зацепления со звеном 2, срабатывает устройство 7, и диск Б вводится в зацепление с диском А. Вращение от привода 5 через второе колесо 10 передается винту 9 и преобразуется в перемещение звенао11, а через зубчатую пару колесо 6 - диск А передается наружному телескопическому звену, которое вращается с отличной от вращения винта 9 угловой скоростью за счет редукции в зубчатой паре колесо 6 - диск А. Производится наложение поступательного движения звена 11 и вращательного движения звеньев 2.
При наличии криволинейного паза 15 на предпоследнем звене 2 за счет
вое движение въ ходного з . схеме включения зубчатой осуществления поступател щенпя.
Формула
20
обр
25
вую передачу, винт котор приводом, а гайка выполн ряда телескопических зве матически связанных с ви 15 мощью винтовых роликов, отличающийся с целью расширения техно возможностей за счет уве пени подвижности выходно пического звена, он снаб мой муфтой сцепления, ус в корпусе и выполненной подвижных соосных винту дисков, первый из которы с возможностью вращения телескопическом звене га тически связан посредств тельно введенного зубчат с приводом, второй устан можностью осевого переме же звене гайки и кинемат с первым или третьим дис а третий установлен в ко можностью осевого переме этом на торцовой поверхн ного телескопического зв ной к приводу, нарезан з нец, кинематически связа посредством второго допо управляемого зубчатого к вижного в осевом направл ложенного на этом винте.
30
35
40
45
ползуна 1§ происходит заданное винто- 50 воположное направление.
вое движение въ ходного звена 1 при . схеме включения зубчатой муфты .4 для осуществления поступательного пегеме- щенпя.
Формула
обретения
воположное направление.
u$.Z
16 2
| Модуль манипулятора | 1985 |
|
SU1329962A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
