Изобретение относится к подъемно-транспортному машиностроению, а именно к выносным опорам для самоходных стреловых кранов, экскаваторов и подобных машин большой грузоподъемности.
Цель изобретения - повышение надежности в работе.
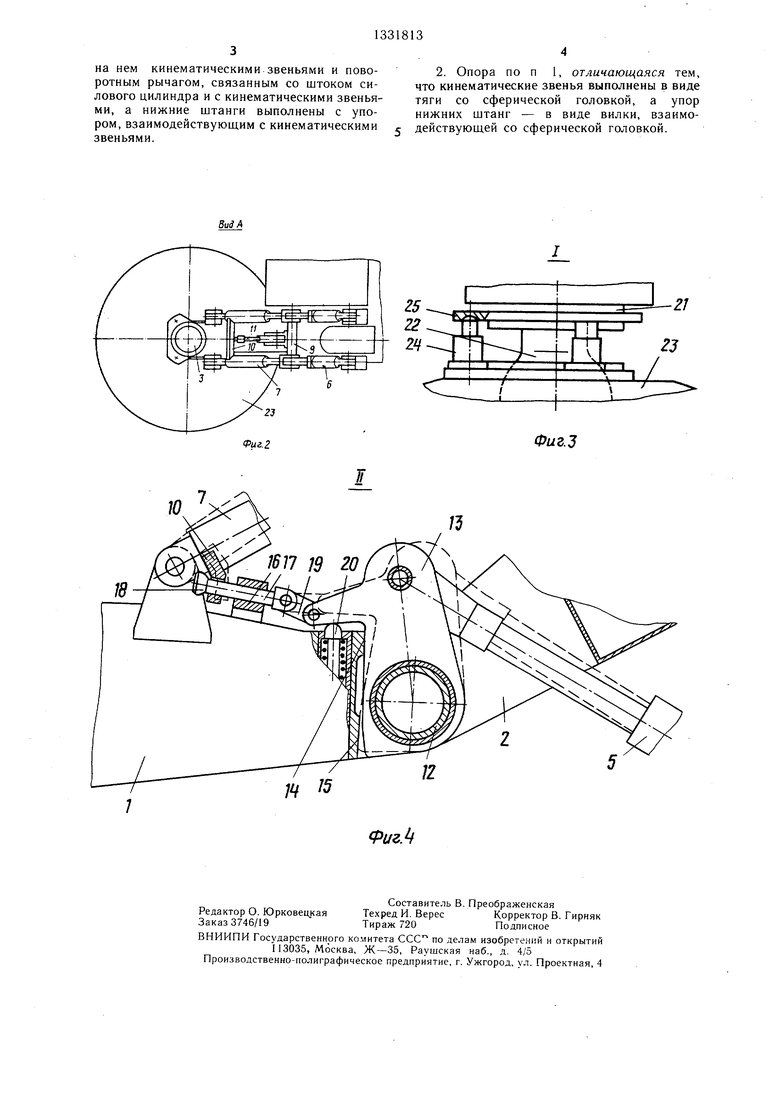
На фиг. 1 показана выносная опора, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - узел 11 на фиг. 1.
Выносная опора содержит откидной кронштейн 1, шарнирно установленный на поперечной балке 2 и жестко скрепленный с корпусом домкрата 3. Балка 2 установлена на раме 4 грузоподъемной машины, к которой шарнирно прикреплен силовой цилиндр 5. Между балкой 2 и кронштейном 1 установлена парнирно-рычажная система фиксации опоры в рабочем по.тожении, состояш,ая из двух пар верхних 6 и нижних 7 штанг. Штанги 6 и 7 соединены между собой посредством шарнира 8, а с друп;)й парой штанг - распоркой 9. Кроме того, нижние штанги 7 связаны между собой в нижней части распоркой 10, посредине которой закреплена вилка 11.
На ос и 12, соединяюш.ей откидной кронштейн 1 с балкой 2, установлен рычаг 13, 1парнирно связанный со штоком силового цилиндра 5. Возможный поворот рычага 13 ограничен опорными поверхностями 14 и 15 кронштейна 1.
На откидном кронштейне 1 в направляю- ш.ей втулке 16 установлена тяга 17 с головкой 18, имеющей сферическую поверхность. Тяга 17 через серьгу 19 соединена с рычагом 13.
В корпус откидного кронштейна 1 вмонтирован подпружиненный упор 20, взаимодействующий с рычагом 13.
На штоке 21 домкрата 3 установлена с возможностью качания на сферической пяте 22 опорная плита 23, которая снабжена подпружиненными толкателями 24, взаимодействующими с упорами 25, закрепленными на штоке 21.
Опора работает следующим образом.
В транспортном положении опорная плита 23 располагается вертикально. За счет взаимодействия подпружиненных толкателей 24 с упорами 25 устраняется их качание относительно сферической пяты 22.
Для перевода выносной опоры в рабочее положение подают давление в поршневую полость силового цилиндра 5. Его шток, вьщ- вигаясь, воздействует на рычаг 13, который через подпружиненный упор 20 передает усилие на корпус откидного кронштейна, в результате чего осуп;ествляется разворот кронштейна 1 вокруг оси 12 в рабочее положение. При этом штанги 6 и 7 разворачиваются на одну линию, а вилка 11 на распорке 10 упирается в сферическую поверхность головки 18 и препятствует дальнейшему развороту крони тейна 1. При этом рычаг 13, преодолевая усилие подпружиненного упора 20, перемещается относительно
кронштейна 1 и через серьгу 19 выдвигает тягу 17. Вилка 11 заходит за головку 18, и штанги 6 и 7 становятся на прямую линию. Дальнейшим ходом штока силового цилиндра 5 обеспечивается создание зазора между опорными поверхностями вилки 11 и
сферической пов;ерхностью головки 18. При этом рычаг 13 доходит до упора в опорную поверхность 14. За счет усилия цилиндра 5 создается предварительное нагру- жение системы, направленное против усилий,
г возникающих при вывешивании грузоподъемной машины.
Затем выдвигается шток 21 домкрата 3, опорные плиты 23 устанавливаются на грунт, и машина вывешивается.
Усилие от веса грузоподъемной машины
0 замыкается через кронштейн 1, штанги 6 и 7 на балку 2 и через опорную поверхность 14, рычаг 13 и силовой цилиндр 5 на раму 4. Усилия, направленные вдоль оси машины, воспринимаются пространственно разнесенными двумя парами штанг 6 и 7, связанными распорками 9 и 10. Таким силовым замыканием достигается повышенная жесткость системы.
При переводе выносной опоры в транспортное положение шток 21 поднимает опор- д ную плиту 23. Затем начинает втягиваться шток силового цилиндра 5, рычаг 13 разворачивается, через серьгу 19 перемещает в направляющей втулке 16 тягу 17, которая головкой 18 воздействует на вилку 11. Вилка 11 разворачивает нижние штанги 7 на
с угол, превышающий угол самоторможения. Штанги 6 и 7 сгибаются в шарнире 8 и в дальнейщем не препятствуют подъему кронщ- тейна 1.
Рычаг 13 разворачивается до упора в поверхность 15 и, воздействуя на нее, раз0 ворачивает кронштейн 1 в транспортное положение.
Подпружиненный упор служит для исключения ударных нагрузок при прохождении центра масс поворачивающейся части устройства над осью 12, которые могут
- возникнуть из-за перемещения кронштейна 1 в пределах зазора между рычагом 13 и поверхностями 14 и 15.
Формула изобретения
1. Выносная опора грузоподъемной машины, содержащая откидной кронщтейн, щар- нирно закрепленный на раме мащины и жест ко связанный с корпусом домкрата, силовой илиндр и фиксирующее устройство опоры в рабочем положении, состоящее из верхних и нижних щтанг, отличающаяся тем, что, с целью повышения надежности работы, откидной кронщтейн снабжен установленными
на нем кинематическими звеньями и поворотным рычагом, связанным со штоком силового цилиндра и с кинематическими звеньями, а нижние штанги выполнены с упором, взаимодействующим с кинематическими звеньями.
2. Опора по п 1, отличающаяся тем, что кинематические звенья выполнены в виде тяги со сферической головкой, а упор нижних штанг - в виде вилки, взаимо- действуюш.ей со сферической головкой.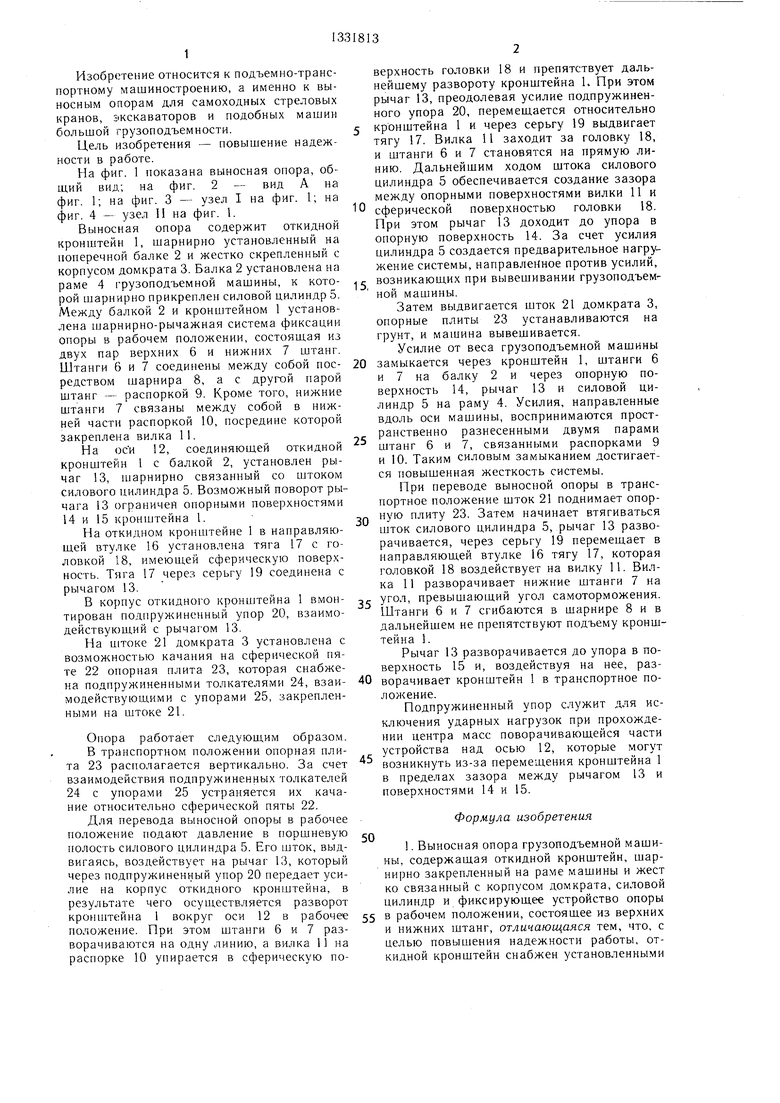
| название | год | авторы | номер документа |
|---|---|---|---|
| Аутригер грузоподъемной машины | 1987 |
|
SU1416432A1 |
| БОКОВАЯ ОПОРА ДЛЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНЫ | 2016 |
|
RU2615843C1 |
| ВЫНОСНАЯ ОПОРА | 1971 |
|
SU305125A1 |
| Устройство для фиксации выносных опор транспортного средства | 1980 |
|
SU872440A1 |
| Выносная опора подъемно-транспортного средства | 1985 |
|
SU1265131A2 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2006 |
|
RU2310305C1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2006 |
|
RU2303339C1 |
| Грузоподъемный кран Пындака | 1980 |
|
SU893829A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Аутригер для подъемно-транспортной машины | 1987 |
|
SU1495275A1 |
Изобретение относится к подъемно- транспортному машиностроению, а именно к выносным онорам. Цель изобретения - ио- вышение надежности в работе. Онора содержит откидной кронштейн 1, жестко скрен- ленный с корнусом домкрата 3 силовой цилиндр 5, две нары верхних 6 и нижних 7 штанг, связанных между собой соответственно расноркой, и рычаг 13. Штанги 6 и 7 сгибаются в И1арнире 8 и не преиятствуют нодъему крони1тейна 1. 1 з.п. ф-лы, 4 ил. /// /// /// /// (Л со со 00 со Фиг.Ч
Фиг. 2
Фиг.З
щ 15
Редактор О. Юрковецкая Заказ 3746/19
Составитель В. Преображенская Техред И. ВересКорректор В. Гирняк
Тираж 720Подписное
ВНИИПИ Государственного комитета ССС по делам изобретений и открытий
13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ФигМ
| Авторское свидетельство СССР № 822440, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
