(54) ГРУЗОПОДЪЕМНЫЙ КРАН ПЫНДАКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемное устройство | 1978 |
|
SU832027A1 |
| Передвижной кран с задвигаемой в транспортное положение стрелой | 1973 |
|
SU519386A1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Устройство для натяжения арматурных пучков при монтаже коробчатых пролетных строений железобетонных мостов | 1983 |
|
SU1157194A1 |
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| ПЛАВУЧИЙ ПОДЪЕМНЫЙ КРАН БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2003 |
|
RU2258026C2 |
| Стреловой кран | 1988 |
|
SU1717526A2 |
| Прицепной грузоподъемный кран | 1982 |
|
SU1051036A1 |
| Крановая установка | 1986 |
|
SU1361103A1 |

I
Изобретение относится к подъемно-транспортному оборудованию, а именно к самоходным стреловым кранам.
Известен грузоподъемный кран, содержащий ходовую платформу, закрепленные к ней посредством шарниров, содержащих s горизонтальные и вертикальные оси, стрелу и силовые цилиндры поворота стрелы, штоки которых соединены между собой и со стрелой 1.
Недостатками известного устройства являются ограниченные зона его действия и Ю грузоподъемность.
Цель изобретения - расширение эксплуатационных возможностей устройства.
Указанная цель достигается тем, что кран снабжен кронштейном, закрепленным 15 к платформе с возможностью поворота относительно горизонтальных осей, расположенных ниже горизонтальной оси шарнира, при этом все упомянутые горизонтальные оси расположены в вертикальной плоскости на одной прямой, проходящей через вертикальную ось шарнира стрелц, силовые цилиндры поворота стрелы смонтированы на упомянутом кронштейне, а силовой цилиндр
поворота кронштейна шарнирно закреплен к ходовой платформе.
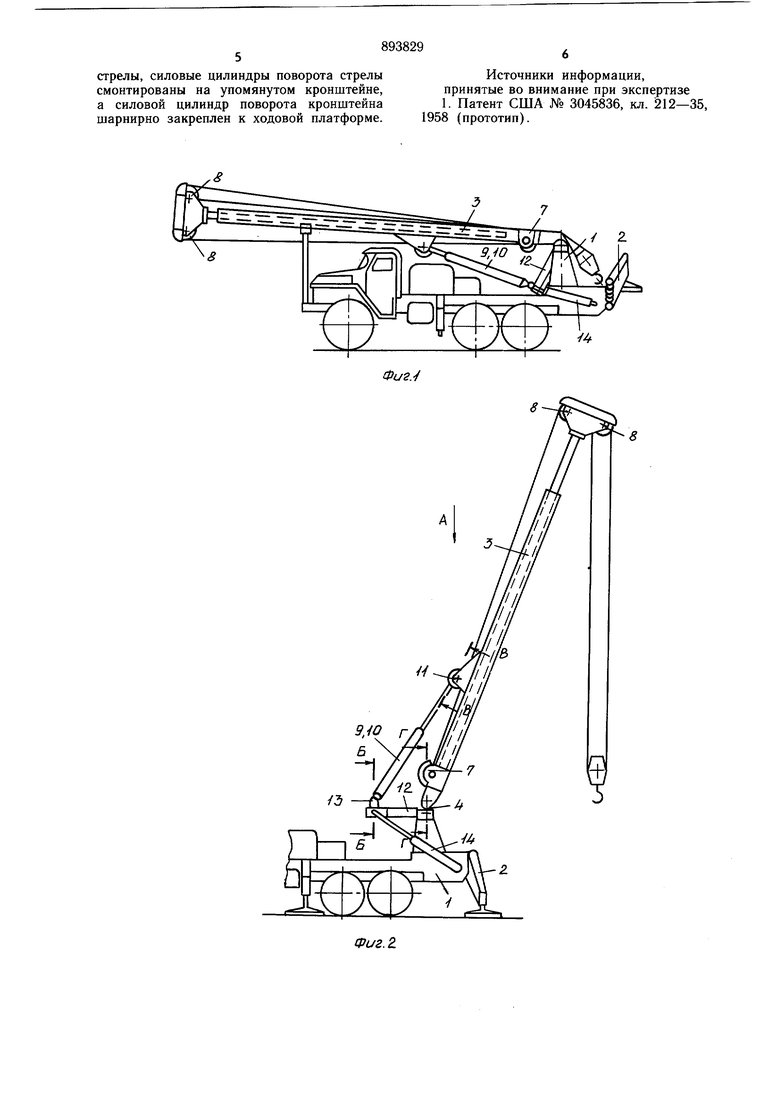
На фиг. 1 показан кран в походном положении, общий вид;на фиг. 2 - стреловое оборудование в рабочем положении, вид сбоку; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - сечение В-В на фиг. 2; на фиг. 6 - сечение Г-Г на фиг. 2.
Стреловое оборудование крана монтируется на ходовой платформе, для чего последняя снабжена опорной балкой 1, к которой могут присоединяться выносные опоры (аутригеры) 2. На опорной балке монтируется стрела 3. Опорный шарнир 4 стрелы имеет две степени свободы и включает в себя вертикальную 5 и горизонтальную 6 оси. Стрела крана выполнена, например, телескопической. На стреле смонтирована лебедка 7 механизма подъема груза, причем в походном положении лебедка располагается под стрелой. На оголовке стрелы имеются направляющие блоки 8 для каната механизма подъема груза, для поворота стрелы в вертикальной плоскости и ее разворота на определенные углы в горизонтальной плоскости предусмотрены два гидравлических силовых цилиндра 9 и 10. Цилиндры расположены под углом друг к другу, их штоки посредством шарнирного узла 11 особой конструкции соединены между собой и со стрелой. Корпуса цилиндров смонтированы на кронштейне 12 с помощью шарниров 13. Кронштейн 12 шарнирно крепится на опорной балке 1 ходовой платформы и приводится в действие силовыми цилиндрами 14. Горизонтальные оси D-D поворота кронштейна лежат ниже горизонтальной оси 6 (фиг. 6) ив вертикальной плоскости расположены на одной прямой, проходящей через вертикальную ось шарнира стрелы.
Шарниры 13 имеют две степени свободы и расположены по углам противоположной от осей D-D стороны основания 12, шарниры могут быть выполнены в виде специального соединения карданного типа (фиг. 4), снабженного переходной вилкой 15 с осями, расположенными во взаимно перпендикулярных направлениях. В шарнирном узле 11 штоки силовых цилиндров 9 и 10 для подъема и поворота стрелы соединены между собой {фиг. 5) осью 16, помещенной в стенках пустотелой шаровой опоры 17. Последняя заключена в обойму 18 с цапфами 19, соединенными со стрелой.
В составе крана имеется гидропривод исполнительных механизмов и другие элементы (не показаны). Силовые цилиндры 9 и 10 имеют независимое управление.
Кран работает следующим образом.
В походном положении (фиг. 1) штоки силовых цилиндров 9, 10 и 14 втянуты и стрела 3 располагается вдоль ходовой платформы. При переводе крана в рабочее положении (фиг. 2 и 3) откидывают выносные опоры 2, затем работой силовых цилиндров 14 переводят кронштейн 12 предпочтительно в горизонтальное положение. Кронштейн 12, разворачиваясь посредством силовых цилиндров 9 и 10, воздействует на стрелу 3, разворачивая ее в вертикальной плоскости за пределы опорной балки 1 ходовой платформы. Когда кронштейн 12 занимает горизонтальное положение, стрела 3 проходит через вертикальное положение. В противном случае в опорном шарнире 4 стрелы может быть мертвая точка.
Дальнейшее перемещение стрелы 3 осуществляют, в основном, работой силовых цилиндров 9 и 10. При одновременном выдвижении штоков этих цилиндров стрела разворачивается только в вертикальной плоскости, наклоняясь вниз за пределы ходовой платформы (фиг. 2). Перемещение стрелы в горизонтальной плоскости производят работой одного из цилиндров 9 или 10, а также определенным сочетанием работы обоих цилиндров. В частности, при выдвижении щтока одного из цилиндров 9 или 10 стрела
разворачивается в горизонтальной плоскости - влево или вправо от продольной оси ходовой платформы (фиг. 3) и несколько перемещается в вертикальной плоскости. Дополнительные подвижности сообщаются стреле за счет работы силовых цилиндров 14 - отклонением кронштейна 12 от горизонтального положения. Выдвижение телескопической части стрелы, работа лебедки 7, блоков 8 и, в конечном счете, вертикальный подъем груза производятся в обычном порядке. В рабочем положении (фиг. 2) лебедка 7 оказывается над стрелой.
При эволюциях стрелы в пространстве вертикальная ось 5 шарнира стрелы 4 разворачивается относительно опорной балки 1 ходовой платформы, а стрела разворачивается на оси 6. Поскольку оси D-D кронштейна 12 проходят через вертикальную ось опорного щарнира 4 стрелы, а сам опорный шарнир смонтирован на платформе, на перемещение стрелы не оказывает влияния отклонение кронштейна 12 от горизонтального положения. Подобным образом реализуются две степени свободы и в щарнирах 13 силовых цилиндров 9 и 10. Противоположные концы этих цилиндров разворачиваются друг относительно друга в шарнирном узле II на оси 16. Последняя захватывает шаровую опору 17, разворачивая ее в общем случае в двух направлениях относительно обоймы 18, которая, в свою
д очередь, на цапфах 19 покачивается относительно стрелы. В этом шарнире особой конструкции реализуются необходимые четыре степени свободы и обеспечивается пересечение на стреле осей симметрии силовых цилиндров 9 и 10 геометрически в од5 НОЙ точке - в центре шаровой опоры 17. Технико-экономическая эффективность применения предлагаемого крана заключается в расщирении зоны действия-и увеличении грузоподъемности за счет того, что стрела крана переводится в ее обычную ра° бочую зону - за пределы шасси.
Формула изобретения
Грузоподъемный кран, содержащий ходовую платформу, закрепленные к ней посредством шарниров, содержащих горизонтальные и вертикальные оси, стрелу и силовые цилиндры поворота стрелы, штоки которых соединены между собой и со стрелой, отличающийся тем, что, с целью рас0 щирения его эксплуатационных возможностей, кран снабжен кронштейном, закрепленным к платформе с возможностью поворота относительно горизонтальных осей, расположенных ниже горизонтальной оси шарJ нира стрелы, и силовым цилиндром поворота кронштейна, при этом все упомянутые горизонтальные оси расположены в вертикальной плоскости по одной прямой, про-. ходящей через вертикальную ось щарнира
стрелы, силовые цилиндры поворота стрелы смонтированы на упомянутом кронштейне, а силовой цилиндр поворота кронштейна шарнирно закреплен к ходовой платформе.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3045836, кл. 212-35, 1958 (прототип).
/ Z
8Фиг. 2. Вид А ФигМ
Д
