Изобретение относится в медицине, в частности к протезированию и про- тезостроеиию, и может быть использовано в многофункциональных протеза -верхних конечностей, а такхсе в экзо- скелетонах или манипуляторах.
Целью изобретения является повышение точности выполнения движения многофункциональным протезом инвалидами с пораженными управляющими мьшцами,
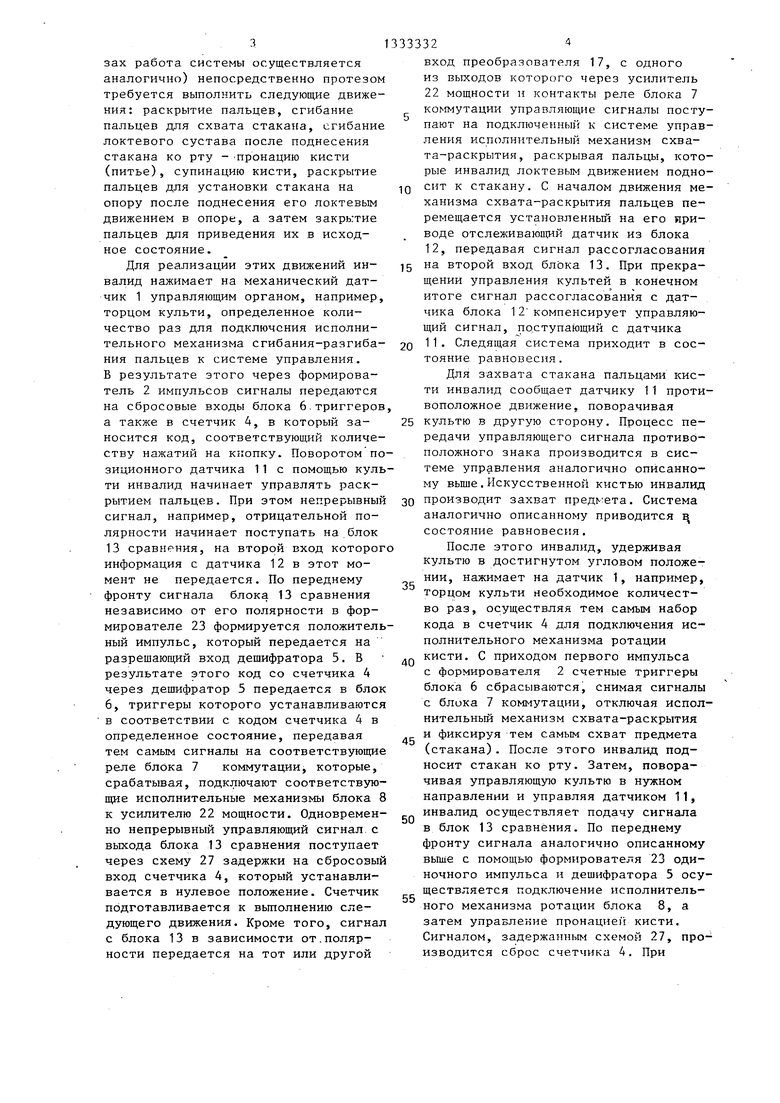
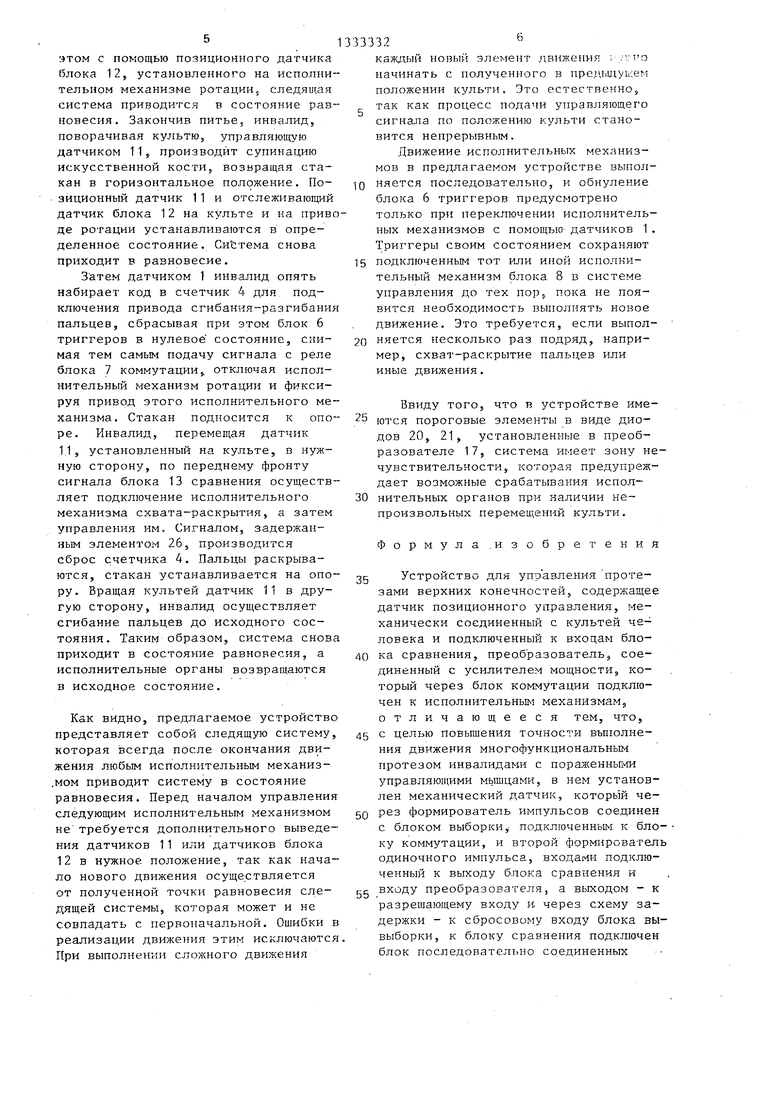
На фиг. 1 приведена блок-схема предлагаемого устройства;на фиг. 2 - функциональная схема устройства; на фиг. 3 - возможный вариант подключения блока, отслеживающих датчиков.
Устройство представляет собой еледящую систему и содержит механический 2о полярности входного сигнала установдатчик 1 (фиг. 1), выполненный, например, в виде кнопки и соединенный с формирователем 2 одиночных импульсов, блок 3 выборки, включающий последовательно соединенные счетчик 4, дешифратор 5, блок 6 триггеров. К входу блока 3 выборки, к счетчику 4 и блоку 6 триггеров подключен выход формировате.пя 2. Выход блока 6 триггеров через блок 7 коммутации, вы- ,полненный, например, в виде релейных схем, соединены с блоком 8 исполнительных механизмов, выполненных на электро.приводах постоянного тока. К сбросовым шинам счетчика 4 и блока 6 триггеров подключен выход формирователя 9 сбросового импульса, соединенного с одним из полюсов источника 10 питания. Механический датчик
Iустановлен в непосредственной близости от торца культи или других частей тела, например плеча, которыми инвалиду удобно производить нажатие на этот датчик. Устройство включает также выполненные, например, в виде потенциометров с ли.нейной характеристикой позиционный датчик
I1и блок 12 последовательно соединенных отслеживающих датчиков. При этом позиционный датчик 11 механи чески соединен с культей конечности и подключе.н к входу блока 13 сравнения, а отслеживающие датчики блока 12 механически связаны с приводами соответствующих исполнительных механизмов блока 8 и подключены к второму входу блока 13 сравнения. Кроме того, датчик 11 и датчики блока 12 соед.инены с общей точкой схемы.
Последовательно соединенные блока 12 могут быть включены также, в цепь обратной связи блока 13 сравнения (фиг. 3). В таком случае второй вход блока 13 через согласующий резистор 14 соединен с общей точкой схемы. Блок 13 сравнения выполнен, например, в виде двухканального
сумматора 15, на одном из входов которого установлен элемент 16 НЕ,и реализует операцию вычитания двух сигналов с инвертированием .их разности, т.е. а-}- (-Ь) Ь-а. Выход блока 13
сравнения подключен к двухканально- му импульсному преобразователю 17, включающему генераторы 18, 19 импульсов, например мyльтиEибpaтopЫJ на входах которых для распознавания
5
лены диоды 20 и 21. Преобразователь 17 подключен к двухканальному усилителю 22 мощности, выполненному, например, по мостовой схеме. Выходы
ь усилителя 22 мощности через элементы коммутации (контакты реле) блока 7 коммутации подключены соответственно к исполнительным механизмам блока 8. Выход блока 13 сравнения под0 ключей также к входам формирователя 23 одиночных импульсов от сигналов положительной или отрицательной полярности, выполненного, например, на двухканальном преобразователе 24,. построенном на ясдуш,их мультивибра- торах, на одном из входов которого установлены последовательно соединен- 25 и элемент 26 НЕ.-Выход формирователя 23 подключен к счетному входу дешифратора 5, а через схему 27 задержки - к входу счетчика 4 .
Устройство работает следующим образом.
В исходном состоянии позиционный 11 и отслеживающие датчики блока 12 находятся в нейтральном положении, которое определяется естественным положением культи конечности человека и исполнительных механизмов протеза.
При включении источника 10 питания сигнал с формирователя 9 передается на счетчик 4 и триггеры блока 6, которые устанавливаются в исходное положение. При выполнении сложного движения,, например питье из стакана, в наиболее-простом протезе предплечья (в более сложных проте-0
5
0
5
зах работа системы осуществляется аналогично) непосредственно протезом требуется выполнить следующие движения: раскрытие пальцев, сгибание пальцев для схвата стакана, сгибание локтевого сустава после поднесения стакана ко рту - -пронацию кисти (питье), супинацию кисти, раскрытие пальцев для установки стакана на опору после поднесения его локтевым движением в опоре, а затем закрытие пальцев для приведения их в исходное состояние.
Для реализации этих движений ий- валид нажимает на механический датчик 1 управляющим органом, например, торцом культи, определенное количество раз для подключения исполнительного механизма сгибания-разгиба- ния пальцев к системе управления. В результате этого через формирователь 2 импульсов сигналы передаются на сбросовые входы блока 6.триггеров а также в счетчик 4, в который за- носится код, соответствующий количеству нажатий на кнопку. Поворотом позиционного датчика 11 с помощью культи инвалид начинает управлять раскрытием пальцев. При этом непрерывный сигнал, например, отрицательной полярности начинает поступать на.блок 13 сравнения, на второй вход которог информация с датчика 12 в этот момент не передается. По переднему фронту сигнала блока 13 сравнения независимо от его полярности в формирователе 23 формируется положительный импульс, который передается на разрешающий вход дешифратора 5. В результате этого код со счетчика 4 через дешифратор 5 передается в блок 6, триггеры которого устанавливаются в соответствии с кодом счетчика 4 в определенное состояние, передавая тем самым сигналы на соответствующие реле блока 7 коммутации, которые, срабатывая, подключают соответствзпо- щие исполнительные механизмы блока 8 к усилителю 22 мощности. Одновремен- но непрерывный управляющий сигнал с выхода блока 13 сравнения поступает через схему 27 задержки на сбросовый вход счетчика 4, который устанавливается в нулевое положение. Счетчик подготавливается к выполнению следующего движения. Кроме того, сигнал с блока 13 в зависимости от.полярности передается на тот или другой
5 о Q
5
5
вход преобразователя 17, с одного из выходов которого через усилитель 22 мощности и контакты реле блока 7 коммутации управляющие сигналы поступают на подключенны к системе управления исполнительный механизм схва- та-раскрытия, раскрывая пальцы, которые инвалид локтевым движением подносит к стакану. С началом движения механизма схвата-раскрытия пальцев перемещается установленньш на его ири- воде отслеживающий датчик из блока 12, передавая сигнал рассогласования на второй вход блока 13. При прекращении управления культей в конечном итоге сигнал рассогласования с датчика блока 12 компенсирует управляющий сигнал, поступак)щий с датчика 11. Следящая система приходит в состояние равновесия.
Для захвата стакана пальцами кисти инвалид сообщает датчику 11 противоположное движение, поворачивая культю в другую сторону. Процесс передачи управляющего сигнала противоположного знака производится в системе управления аналогично описанному выше.Искусственной кистью инвалид производит захват предмета. Система аналогично описанному приводится состояние равновесия.
После этого инвалид, удерживая культю в достигнутом угловом положении, нажимает на датчик 1, например, торцом культи необходимое количество раз, осуществляя тем самым набор кода в счетчик 4 для подключения исполнительного механизма ротации кисти. С приходом первого импульса с формирователя 2 счетные триггеры блока 6 сбрасываются, снимая сигналы с блока 7 коммутации, отключая исполнительный механизм схвата-раскрытия и фиксируя тем самым схват предмета (стакана). После этого инвалид подносит стакан ко рту. Затем, поворачивая управляющую культю в нужном направлении и управляя датчиком 11, инвалид осуществляет подачу сигнала в блок 13 сравнения. По переднему фронту сигнала аналогично описанному вьше с помощью формирователя 23 одиночного импульса и дешифратора 5 осуществляется подключение исполнительного механизма ротации блока 8, а затем управление пронациеГ кисти. Сигналом, задержанным схемой 27, производится сброс счетчика 4. При
этом с помощью позиционного датчика блока 12, установленного на исполнительном механизме ротации, следяиитя система приводится в состояние равновесия. Закончив питье, инвалид поворачивая культю, управляющую датчиком 115 производит супинацию искусственной кости, возвращая стакан в горизонтальное полсэжение. По- - зиционный датчик 11 и отслеживающий датчик блока 12 на культе и на приводе ротации устанавливаются в определенное состояние. Сийтема снова приходит в равновесие.
Затем датчиком 1 инвалид опять набирает код в счетчик 4 для подключения привода сгибания-разгибания пальцев, сбрасывая при этом блок 6 триггеров в нулевое состояние, снимая тем самым подачу сигнала с реле блока 7 коммутацииJ отключая исполнительный механизм ротации и фиксируя привод этого исполнительного механизма. Стакан подносится к опоре. Инвалид, перемещая датчик 1,1 , установленный на культе, в нужную сторону, по переднему фронту сигнала блока 13 сравнения осуществляет подключение исполнительного механизма схвата-раскрытия, а затем управления им. Сигналом, задержанным элементом 26, производится сброс счетчика 4. Пальцы раскрываются, стакан устанавливается на опору. Вращая культей датчик 11 в другую сторону, инвалид осуществляет сгибание пальцев до исходного состояния. Таким образом, система снова приходит в состояние равновесия, а исполнительные органы возвращаются в исходное состояние.
Как видно, предлагаемое устройство представляет собой следящую систему, которая всегда после окончания движения любым исполнительным механиз- .мом приводит систему в состояние равновесия. Перед началом управления следующим исполнительным механизмом не требуется дополнительного выведения датчиков 11 или датчиков блока 12 в нужное положение, так как начало нового движения осуществляется от полученной точки равновесия следящей системы, которая может и не совпадать с первоначальной. Ошибки в реализации движения этим исключаются При выполнении сложного движения
33332
каждый новый элемент движения ; /гт о начинать с полученного в пред ыдуцем положении культи. Это естественно, так как процесс подачи управляющего сигнала по положению культи становится непрерывным.
Движение исполнительных механизмов в предлагаемом устройстве выпол10 няется последовательно, и обнуление блока 6 триггеров предусмотрено только при переключении исполнительных механизмов с помощью датчиков 1 . Триггеры своим состоянием сохраняют
15 подключенным тот или иной исполнительный механизм блока 8 в системе управления до тех пор, пока не появится необходимость выпо:7нять новое движение. Это требуется, если выпол20 няется несколько раз подряд, например, схват-раскрытие пальцев или иные движения.
Ввиду того, что в устройстве имеются пороговые элементы в виде диодов 20, 21, установленные в преобразователе 17, система имеет зону нечувствительности, которая предупреждает возможные срабатывания испол- нительных органов при наличии непроизвольных перемещений культи.
Формула .изобретения
Устройство для управления протезами верхних конечностей, содержащее датчик позиционного управления, механически соединенный с культей человека и подключенный к вхоцам блока сравнения, прео.б разователь, соединенный с усилителем мощности, который через блок коммутации подключен к исполнительным механизмам, отличающееся тем, что,
с целью Повышения точности выполнения движения многофункциональным протезом инвалидами с поралсенньми управляющими мышцами, в нем установлен механический датчик, который через формирователь импульсов соединен с блоком выборки,- подключенным к бло- ку коммутации, и второй формирователь одиночного импульса, входами подключенный к выходу блока сравнения и
входу преобразователя, а выходом - к разрешающему входу и через схему задержки - к сбросовому входу блока вы- выборки, к блоку сравнения подключен блок последовательно соединенных
113333328
отслеживающих датчиков, механически выборки через формирователь сбросово- свяэанных с приводами исполнительных го импульса подключен источник пи- механизмов, к сбросовым шинам блока тания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475652A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| Устройство для управления биоэлектрическим протезом плеча | 1985 |
|
SU1344351A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475653A1 |
Изобретение относится к проте- зированию и протезоотроению. Цель изобретения - повышение точности выполнения движения многофункциональным протезом. Устройство представляет собой следящую систему и содержит механический датчик 1, соединенный с формирователем 2 одиночных импульсов. Блок 3 выборки включает счетчик 4, дешифратор 5 и блок 6 триггеров. Выходы блока 6 через блок 7 коммутации соединены с блоком 8 исполнительных механизмов. Выход формирователя 9 сбросового импульса соединен с полюсом источника 10 питания . Позиционный датчик 11 соединен с культей конечности и подключен к входу блока 13 сравнения. Преобразователь 17 подключен к двухка-. нальному усилителю мощности. Выход формирователя 23 подключен к входу дешифратора 5, а через схему 27 задержки - к входу счетчика А. В устройстве имеются пороговые элементы, установленные в преоб разователе 17. Благодаря этому система имеет зону нечувствительности, которая предупреждает возможные срабатывания исполнительных органов при непроизволь ных перемещениях культи. 3 ил. S - I СО со со со со to 
Фиг. 2
Щ
Фиг.З
Редактор А.Маковская
Составитель В.Ваганов
Техред Л. Сердюкова Корректор С.Шекмар
3860/5
Тираж 594Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 769804, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
