1
Изобретение относится к машиностроению, в частности к устройствам автоматики, и может быть использовано в механизмах, требующих дискретного позиционирования.
Цель изобретения - упрощение конструкции и повышение надежности.
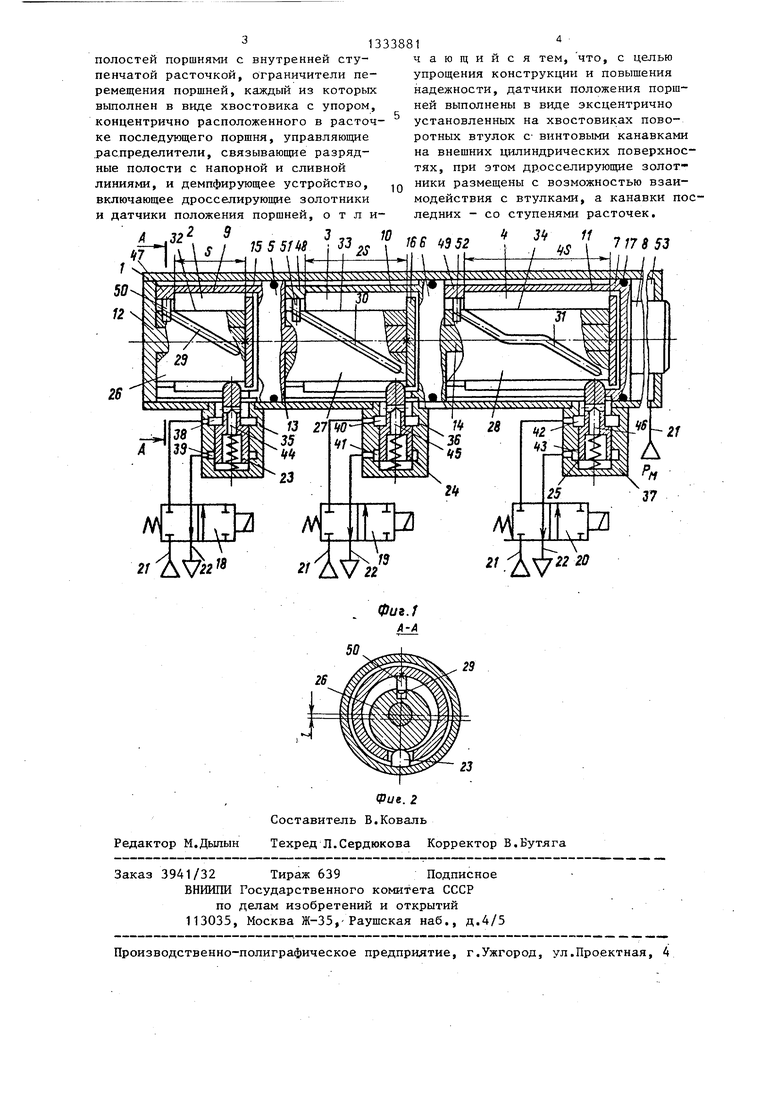
На фиг.1 представлена принципиальная схема привода; на фиг.2 - разрез А-А на фиг.1.
Цифровой привод содержит (фиг.1) цилиндр 1 с последовательно расположенными в нем с образованием разрядных полостей 2, 3 и 4 поршнями 5, 6 и 7. С поршнем 7 жестко соединен шток 8. В поршнях 5, 6 и 7 выполнены внутренние ступенчатые расточки 9, 10 и 11. Кроме того, привод включает ограничители перемещения поршней 5, 6 и 7, выполненные в виде хвостовиков 12 13 и 14 с упорами 15, 16 и 17, управляющие распределители 18, 19 и 20, связывающие разрядные полости 2, 3 и 4 с напорной или сливной линиями 21 и 22, и демпфирующее устройство, содержащее дросселирующие золотники 23, 24 и 25 и датчики положения, выполненные в виде эксцентрично установленных на хвостовиках 12, 13 и 14 поворотньк втулок 26, 27 и 28 с винтовыми канавками 29, 30 и 31 на внешних цилиндрических поверхностях 32, 33 и 34. Золотники 23, 24 и 25 установлены в корпусах 35, 36 и 37, в которых выполнены рабочие окна 38- 43. В золотниках 23, 24 и 25 выполнены каналы 44, 45 и 46, при этом золотники 23, 24 и 25 размещены с- возможностью взаимодействия с. втулками 26, 27 и 28, а канавки 29, 30 и.31 последних - со ступенями 47, 48 и 49 расточек 9, 10. и 11 посредством пальцев 50, 51 и 52. Возвратная полость 53 постоянно сообщена с напорной линией 21.
Привод работает следующим образом.
В исходном положении под действием давления питания , постоянно подведенного к возвратной полости 53, все поршни 5, 6 и 7 занимают левые крайние положения. При подаче управляющего сигнала на распределитель 18 разрядная полость 2 сообщается с напорной линией 21 и поршень 5 перемещается вправо на величину S. При этом эксцентрично размещенная на хвостовике 12 втулка 26 поворачивает33881.2
ся против часовой стрелки (фиг.2) и, воздействуя на золотник 23, перемещает его в сторону оси цилиндра 1. По мере размещения золотника 23 перекрывается рабочее окно 38, связанное с напорной линией 21, вследствие чего происходит торможение поршня 5 и, следовательно, штока 8.
При снятии управляющего сигнала с распределителя 18 разрядная полость 2 через канал 44, рабочее окно 39 сообщается со сливной линией 22. Поршень 5 под действием давления пи-.
10
тания Р в возвратной полости 53 пе
ремещается влево. При этом втулка 26 поворачивается в обратном направлен НИИ и, следовательно, золотник 23 перемещается от оси цилиндра 1, перекрывая в конце хода рабочее окно 39. Происходит торможение поршня 5.
При одновременном включении, например,распределителей 18 и 19 разрядные полости 2 и 3 сообщаются через рабочие окна 38 и 40 с напорной линией 21. Поршни 5 и 6 перемещаются вправо до соответствующих упоров 15 и 16. Происходит суммирование ходов поршней 5 и 6, и шток 8 перемещается на величину 3 S. Втулки 26 и 27 поворачиваются против часовой стрелки, при этом золотники 23 и 24 перекрывают рабочие окна 38 и 40, вследствие чего происходит торможение поршней 5 и 6 в конце ходов.
При отработке других комбинаций управляющих сигналов привод работает аналогично. Закон торможения поршней
5,6 и 7 определяется углом подъема винтовых канавок 29, 30 и 31, что позволяет осуществлять заданньй закон торможения как при прямом, так и при обратном ходе штока 8.
Таким образом, предложенная кине- матическая связь между поршнями 5,
6.и 7 и дросселирующими золотниками 23, 24 и 25 исключает возможность возниконовения рассогласования между ними, что позволяет получить точные
и быстродействующие гидравлические или пневматические цифровые приводы более простыми и надежными средствами.
Формулаиз обретения
Цифровой привод.содержащий ци-. . линдр с последовательно расположенными в нем с образованием разрядных
полостей поршнями с внутренней ступенчатой расточкой, ограничители перемещения поршней, каждый из которых выполнен в виде хвостовика с упором, концентрично расположенного в расточке последующего поршня, управляющие .распределители, связывающие разрядные полости с напорной и сливной линиями, и демпфирующее устройство, включающее дросселирующие золотники и датчики положения поршней, о т л и
чающийся тем, что, с целью упрощения конструкции и повышения надежности, датчики положения поршней выполнены в виде эксцентрично установленных на хвостовиках поворотных втулок с- винтовыми канавками на внешних цилиндрических поверхностях, при этом дросселирующие золотники размещены с возможностью взаимодействия с втулками, а канавки последних - со ступенями расточек.
« J« 11 I S
гз
Редактор М.Дылын
Фив. 2 Составитель В.Коваль
Техред Л.Сердюкова Корректор В.Бутяга
Заказ 3941/32 Тираж 639 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35,-Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ (ВАРИАНТЫ) | 1995 |
|
RU2104148C1 |
| Электрогидравлический шаговый привод | 1971 |
|
SU481712A1 |
| Гидропневматический двигатель ударного действия | 1974 |
|
SU543744A1 |
| Гидропривод | 1982 |
|
SU1048189A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА С РЕАЛИЗАЦИЕЙ ФУНКЦИИ АКТИВНОГО ДЕМПФИРОВАНИЯ | 2008 |
|
RU2374506C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ С ОДНОСТОРОННИМ УПРАВЛЕНИЕМ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242575C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Пневмогидравлический следящий привод с цифровым управлением | 1980 |
|
SU1011920A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ ШАХТНЫХ МЕХАНИЗИРОВАННЫХ КРЕПЕЙ | 1991 |
|
RU2006586C1 |
Изобретение относится к области автоматики и м.б. использовано в механизмах с дискретным позиционированием. Цель изобретения - упрощение и повышение надежности привода. Датчики положения поршней выполнены в виде эксцентрично установленных на хвостовиках поворотных втулок с винтовыми канавками на внешних цилиндрических поверхностях.В корпусах,в к-рых установлены дросселирующие золотники (ДЗ) , вьшолнены рабочие окна, а в ДЗ - каналы. ДЗ взаимодействуют с поворотными втулками, а канавки последних- со ступенями внутренних расточек поршней, что исключает возможность возникновения рассогласования между ними. Закон торможения поршней определяется углом подъема винтовых канавок, что позволяет осуществлять заданный закон как при прямом, так и при обратном ходе штока. 2 ил. с В (Л со 00 со 00 ОС
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
