Изобретение относится к электротехнике и может быть использовано для управления асинхронными электродвигателями промышленных механизмов путем регулирования напряжения питания электродвигателей при изменении нагрузки на валу.
Цель изобретения - улучшение, энергетических характеристик.
На фиг. 1 показана структурная схема асинхронного электропривода-; на фиг. 2 - вариант выполнения блока определения фазового сдвига между током и напряжением статора; на фиг. 3 - вариант выполнения несимметричного усилителя; на фиг. 4 - временные диаграммы, поясняющие работу электропривода; на фиг„ 5 - механические характеристики электродвигателя.
Асинхронный электропривод (фиг, 1 содержит асинхронный электродвигатель 1, тиристорный коммутатор 2, блок 3 импульсно-фазового управления регулятор 4 напряжения, датчик 5 тока статора, датчик 6 напряжения питания электродвигателя, блоки 7 и 8 выделения первых гармоник тока статора и напряжения питания электродвигателя 1, два компаратора 9 и 10, блок 11 определения фазового сдвига между током и напряжением статора, блок 12 сравнения, несимметричньш усилитель 13.
Статорные обмотки асинхронного электродвигателя 1 подсоединены к питающей сети через тиристорный коммутатор 2, управляющие цепи тиристоров которого подсоединены к соответствующим выходам блока 3 импульсно- фазового управления, вход которого через регулятор 4 напряжения и несимметричный усилитель 13 подключен К выходу блока 12 сравнения,, первый вход которого соединен с вькодом блока 11 определения фазового сдвига между током и напряжением статора.
Второй вход блока 12 сравнения предназначен для подачи сигнала задания. Выход датчика 5 тока статора через блок 7 вьщеления первой гармоники тока статора подключен к входу первого компаратора 9. Выход датчика 6 напряжения питания электродвигател через блок 8 вьщеления первой гармоники напряжения питания электродвигателя соединен с входом второго компаратора 10, Выходы 14 и iS компа
5
0
5
0
5
0
5
0
5
ратора 9 и 10 подключены к входам блока -11 определения фазового сдвига между током и напряжением статора.
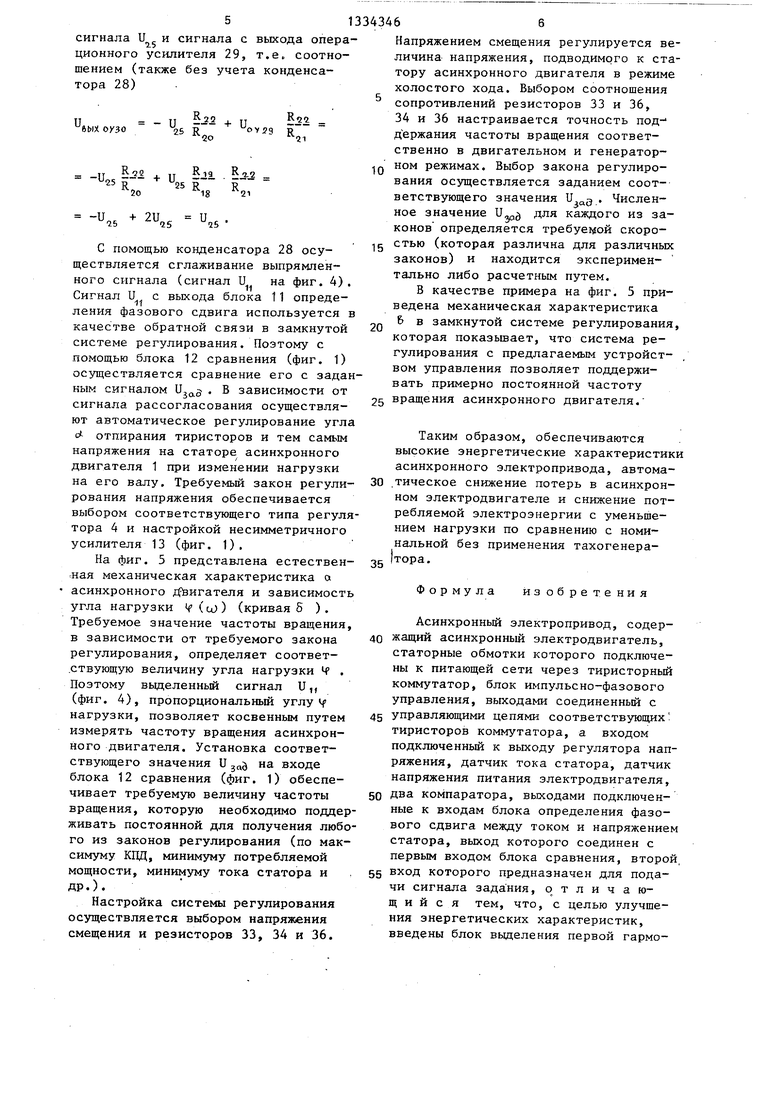
Блок 11 определения фазового сдвига между током и напряжением статора (фиг. 2) содержит резисторы 16-24, стабилитрон 25, диоды 26 и 27, конденсатор 28, операционные усилители
29и 30. Первые выводы резисторов 16 и 17 являются входами 14 и 15 блока
11 определения фазового сдвига, а вторые их выводы объединены и соединены с первыми выводами резисторов 18 и 20, а также с одним из выводов стабилитрона 25, второй вывод которого соединен с обш,ей шиной.
Второй вывод резистора 18 соединен с резистором 19, катодом диода 27 и инверсным входом усилителя 29. Выход последнего соединен с катодом диода 26 н анодом диода 27. Анод диода 26 соединен с резисторами 19 и 21. Выход усилителя 30, являющийся выходом блока 11 определения фазового сдвига, соединен с резистором 22 и конденсатором 28. Инверсный вход усилителя 20 соединен с вторь1м выводом резисторов 20-22 и конденсатора 28. входы усилителей 29 и
30через резисторы 23 и 24 соответственно соединены с общей шиной.
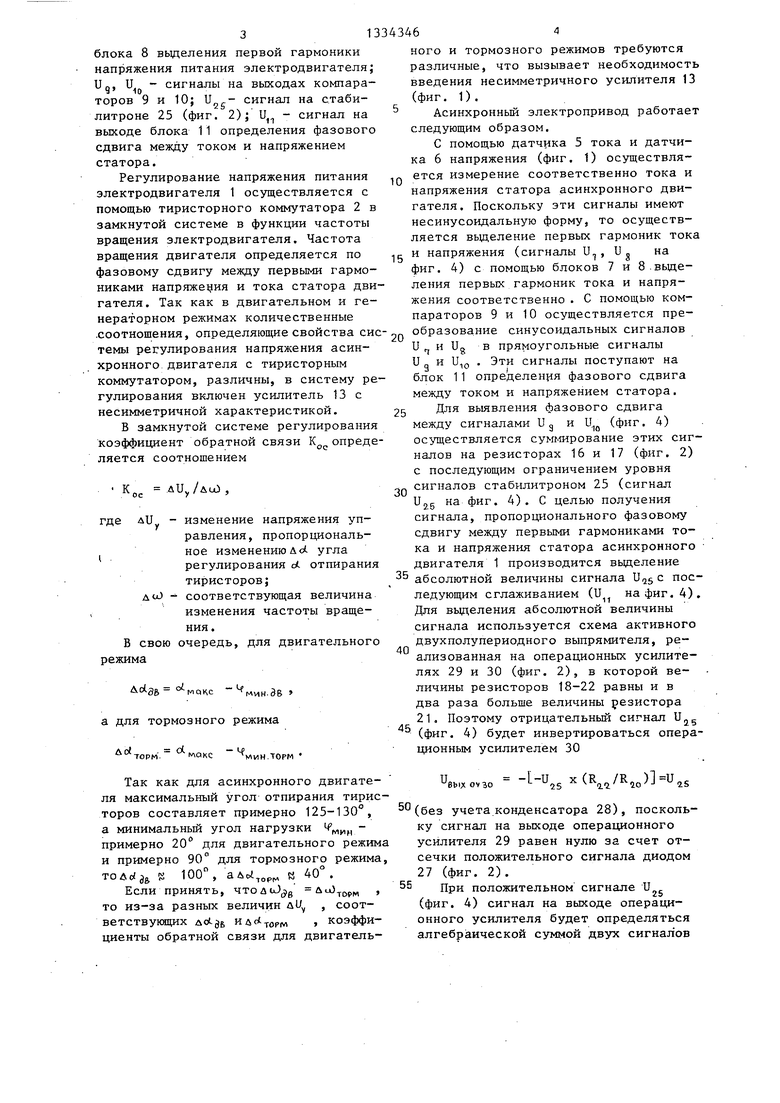
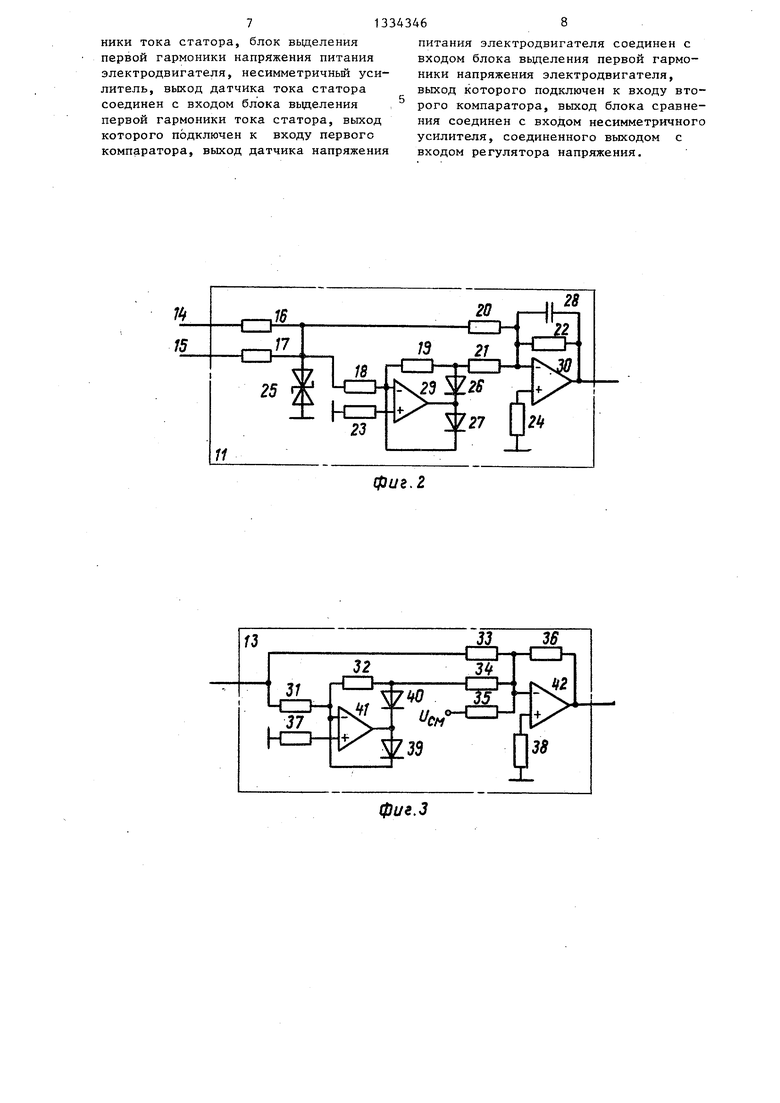
Несимметричный усилитель 13 (фиг. 3) содержит резисторы 31-38, диоды 39 и 40, операционные усилители 41 и 42. Входом несимметричного усилителя 13 являются объединенные выводы резисторов 31 и 33, а его выходом - выход операционного усилителя 42, соединенный с резистором 36, Второй вывод резистора 31 соединен с резистором 32, катодом диода 39 и инверсным входом усилителя 41. Выход усилителя 41 соединен с катодом диода 39 и анодом диода 40. Анод диода 40 соединен с резисторами 32 и 34, Инверсный вход усилителя 42 соединен с вторыми выводами резис.торов 33-36. Прямые входы усилителей 41 и 42 через резисторы 37 и 38 соединены с общей шиной. На первый вывод резистора 35 подается сигнал смещения.
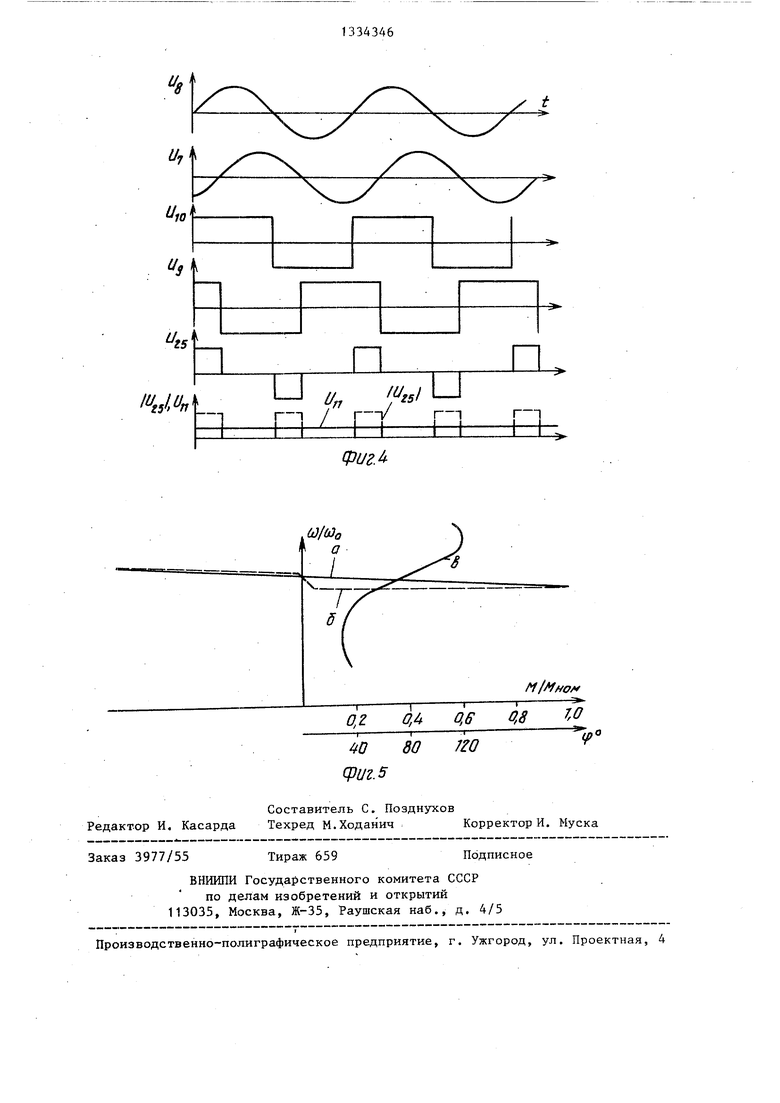
На фиг,, 4, где изображена диаграмма состояний блоков электропривода по фиг. 1 при выполнении блока 11 согласно фиг„ 2, приняты следующие обозначения: U г, - сигнал на выходе блока 7 выделения первой гармоники тока статора; Ug - сигнал на выходе
блока 8 вьщеления первой гармоники напряжения питания электродвигателя; Ug, и - сигналы на выходах компараторов 9 и 10; сигнал на стабилитроне 25 (фиг. 2); Ц - сигнал на выходе блока 11 определения фазового сдвига между током и напряжением статора.
Регулирование напряжения питания электродвигателя 1 осуществляется с помощью тиристорного коммутатора 2 в замкнутой системе в функции частоты вращения электродвигателя. Частота вращения двигателя определяется по фазовому сдвигу между первыми гармониками напряже1 ия и тока статора двигателя. Так как в двигательном и генераторном режимах количественные
.соотношения, определяющие свойства сие-,,,, образование синусоидальных сигналов темы регулирования напряжения асин- U и Ug в прямоугольные сигналы
и
кронного двигателя с тиристорным коммутатором, различны, в систему регулирования включен усилитель 13 с несимметричной характеристикой.
В замкнутой системе регулирования коэффициент обратной связи К определяется соотношением
9 И и,о
Эти сигналы поступают на
блок 11 определения фазового сдвига между током и напряжением статора.
25 Для выявления фазового сдвига между сигналами Ug -ю осуществляется суммирование этих сиг налов на резисторах 16 и 17 (фиг. 2) с последующим ограничением уровня сигналов стабилитроном 25 (сигнал на фиг. 4). С целью получения сигнала, пропорционального фазовому сдвигу между первыми гармониками тока и напряжения статора асинхронного двигателя 1 производится вьщеление
Кос AUy/Aui,
и - изменение напряжения управления, пропорциональное изменению Aci угла регулирования Ы. отпирания тиристоров;
до) - соответствующая величина изменения частоты вращения . свою очередь, для двигательного
а
макс .Зв
а для тормозного режима
торм.
-Ч
МИН.ТОРМ
Так как для асинхронного двигателя максимальный угол отпирания тиристоров составляет примерно 125-130°, а минимальный угол нагрузки мин примерно 20° для двигательного режима и примерно 90° для тормозного режима, тодс(за К 100, и 40°,
Если принять, 4TOA( Л1д)рр„ ,
то из-за разных велич1 н дУ , соот- ветствукндих (оргл коэффициенты обратной связи для двигательного и тормозного режимов требуются различные, что вызывает необходимость введения несимметричного усилителя 13 (фиг. 1).
Асинхронный электропривод работает следующим образом.
С помощью датчика 5 тока и датчика 6 напряжения (фиг. 1) осуществляется измерение соответственно тока и напряжения статора асинхронного двигателя. Поскольку эти сигналы имеют несинусоидальную форму, то осуществляется выделение первьк гармоник тока и напряжения (сигналы U, U на фиг. 4) с помощью блоков 7 и 8.выделения первых гармоник тока и напряжения соответственно . С помощью компараторов 9 и 10 осуществляется пре
и
9 И и,о
Эти сигналы поступают на
0
блок 11 определения фазового сдвига между током и напряжением статора.
5 Для выявления фазового сдвига между сигналами Ug -ю осуществляется суммирование этих сигналов на резисторах 16 и 17 (фиг. 2) с последующим ограничением уровня сигналов стабилитроном 25 (сигнал на фиг. 4). С целью получения сигнала, пропорционального фазовому сдвигу между первыми гармониками тока и напряжения статора асинхронного двигателя 1 производится вьщеление
5 абсолютной величины сигнала U/js последующим сглаживанием (U на фиг, 4), Для вьщеления абсолютной величины сигнала используется схема активного двухполупериодного выпрямителя, реализованная на операционных усилителях 29 и 30 (фиг, 2), в которой величины резисторов 18-22 равны и в два раза больше величины резистора 21. Поэтому отрицательный сигнал U (фиг, 4) будет инвертироваться операционным усилителем 30
0
ивылоузо -t-U,s x(,)U
as
(без учета конденсатора 28), поскольку сигнал на выходе операционного усилителя 29 равен нулю за счет отсечки положительного сигнала диодом 27 (фиг, 2),
При положительном сигнале U (фиг, 4) сигнал на выходе операционного усилителя будет определяться алгебраической суммой двух сигналов
сигнала U и сигнала с выхода операционного усилителя 29, т.е. соотношением (также без учета конденсатора 28)
и, + и,
26 R
20
OV59
Кгг
кГ
21
К-зе К„
-20
и --12- 8
1.
-и + 2U и
76
15
26
С помощью конденсатора 28 осуществляется сглаживание выпрямленного сигнала (сигнал U на фиг. 4) . Сигнал и с выхода блока 11 определения фазового сдвига используется в качестве обратной связи в замкнутой системе регулирования. Поэтому с помощью блока 12 сравнения (фиг. 1) осуществляется сравнение его с заданным сигналом зависимости от сигнала рассогласования осуществляют автоматическое регулирование угла с отпирания тиристоров и тем самым напряжения на статоре асинхронного двигателя 1 при изменении нагрузки на его валу. Требуемьй закон регулирования напряжения обеспечивается выбором соответствующего типа регулятора 4 и настройкой несимметричного усилителя 13 (фиг. 1).
На фиг. 5 представлена естественная механическая характеристика о асинхронного Двигателя и зависимость угла нагрузки v(u)) (кривая 5 ). Требуемое значение частоты вращения, в зависимости от требуемого закона регулирования, определяет соответ- .ствующую величину угла нагрузки Ч . Поэтому вьщеленный сигнал U,, (фиг. 4), пропорциональный углу V нагрузки, позволяет косвенным путем измерять частоту вращения асинхронного двигателя. Установка соответствующего значения U на входе блока 12 сравнения (фиг. 1) обеспечивает требуемую величину частоты вращения, которую необходимо поддерживать постоянной для получения любого из законов регулирования (по максимуму КПД, минимуму потребляемой мощности, минимуму тока статора и ДР.) .
Настройка системы регулирования осуществляется выбором напряжения смещения и резисторов 33, 34 и 36.
43466
Напряжением смещения регулируется величина напряжения, подводимого к статору асинхронного двигателя в режиме холостого хода. Выбором соотношения
сопротивлений резисторов 33 и 36, 34 и 36 настраивается точность под-- д ержания частоты вращения соответственно в двигательном и генератор Q ном режимах. Выбор закона регулирования осуществляется заданием соответствующего значения U а. Численное значение U для каждого из законов определяется требуемой скоро g стью (которая различна для различных законов) и находится экспериментально либо расчетным путем.
В качестве примера на фиг. 5 приведена механическая характеристика Б в замкнутой системе регулирования, которая показьшает, что система регулирования с предлагаемым устройством управления позволяет поддерживать примерно постоянной частоту
25 вращения асинхронного двигателя.
20
30
35
Таким образом, обеспечиваются высокие энергетические характеристик асинхронного электропривода, автома- .тическое снижение потерь в асинхронном электродвигателе и снижение потребляемой электроэнергии с уменьшением нагрузки по сравнению с номинальной без применения тахогенера- |тора.
Формула изобретения
Асинхронный электропривод, содержащий асинхронный электродвигатель, статорные обмотки которого подключены к питающей сети через тиристорный коммутатор, блок импульсно-фазового управления, выходами соединенный с
управляющими цепями соответствующих тиристоров коммутатора, а входом подключенный к выходу регулятора напряжения, датчик тока статора, датчик напряжения питания электродвигателя,
Дв компаратора, выходами подключенные к входам блока определения фазового сдвига между током и напряжением статора, выход которого соединен с первьм входом блока сравнения, второй,
вход которого предназначен для подачи сигнала задания, отличающийся тем, что, с целью улучшения энергетических характеристик, введены блок выделения первой гармо713
НИКИ тока статора, блок выделения первой гармоники напряжения питания электродвигателя, несимметричньй усилитель, выход датчика тока статора соединен с входом блока выделения первой гармоники тока статора, выход которого подключен к входу первого компаратора, выход датчика напряжения
8
питания электродвигателя соединен с входом блока выделения первой гармоники напряжения электродвигателя, выход которого подключен к входу второго компаратора, выход блока сравнения соединен с входом несимметричного усилителя, соединенного выходом с входом регулятора напряжения.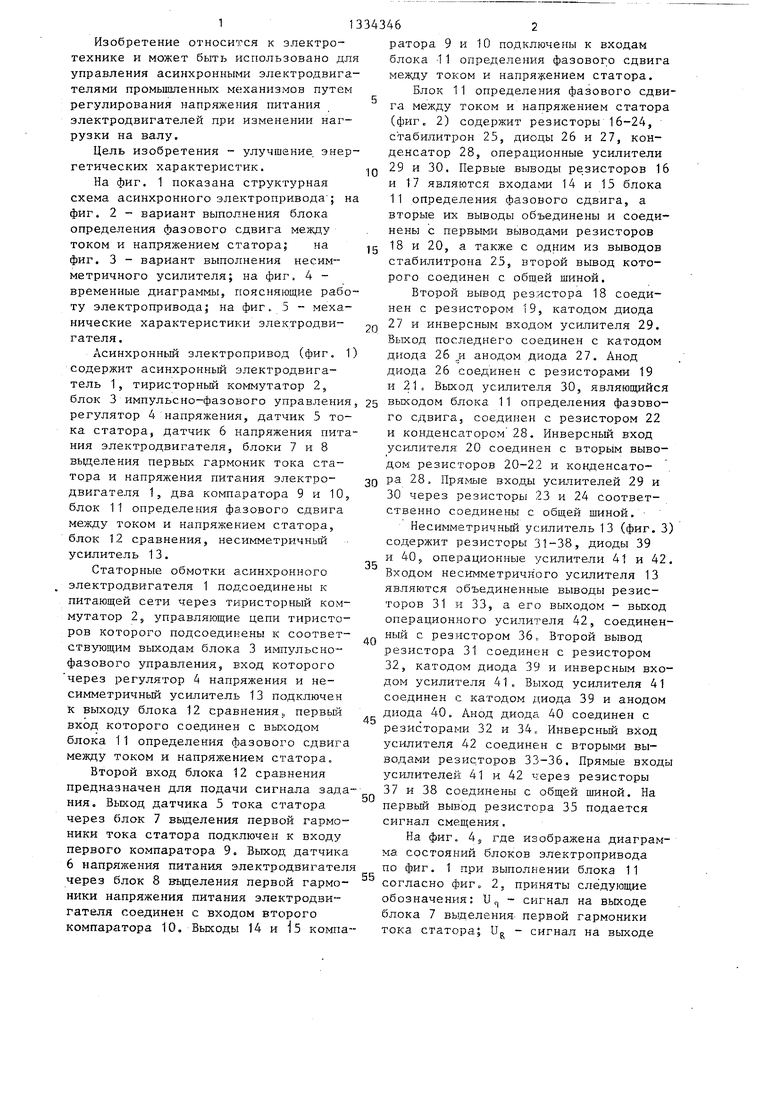
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока с питанием от однофазного источника напряжения | 1984 |
|
SU1328921A1 |
| Асинхронный электропривод | 1989 |
|
SU1753576A1 |
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343530A1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| Устройство для управления асинхронным двухфазным двигателем | 1984 |
|
SU1166256A1 |
| Электропривод переменного тока | 1987 |
|
SU1494192A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Способ управления асинхронным электроприводом | 1988 |
|
SU1628175A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |
Изобретение относится к области электротехники и может быть использовано для управления асинхронными злектродвигателями общепромыпшенных механизмов. Целью изобретения является улучшение энергетических характеристик. В электроприводе, содержащем асинхронный электродвигатель 1, ти- ристорный коммутатор 2, блок импульс- но-фазового управления 3, регулятор напряжения 4, датчики тока и напряжения 5 и 6, компараторы 9 и 10, блок 11определения фазового сдвига и блок 12сравнения, за счет введения блоков 7 и 8 выделения первых гармоник тока статора и напряжения питания электродвигателя 1 и несимметричного усилителя 13 достигается автоматическое снижение потерь в электродвигателе и снижение потребляемой электроэнергии при уменьшении нагрузки по сравнению с номинальной без применения тахогенератора. 5 ил. « (Л изад 11 /VfJ t со 00 4 00 4;: CD фиг.Г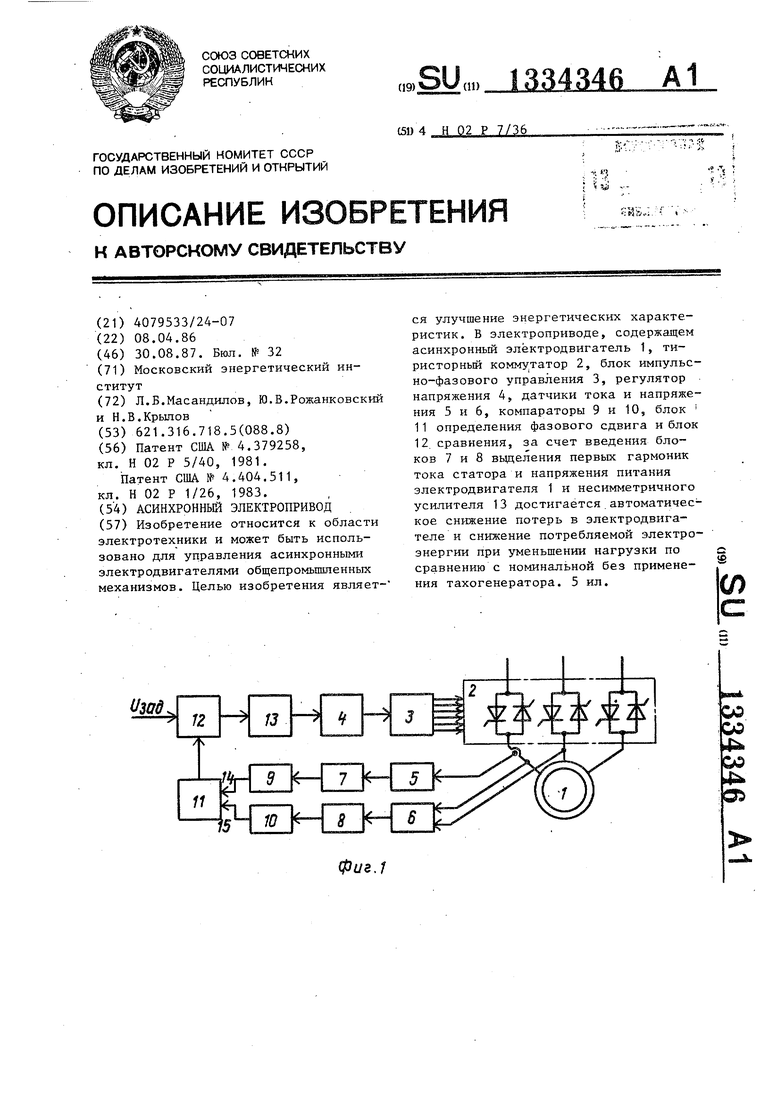
7«
W
CZ}
17
25
KI7 I /б - г4-7 . kizb-ix s
1
23
11
з
23
фиг. 2
фиг.З
Л
Д
,, f/5/
I1 / IV
- I i Фиг4
LJ.
1
H:
(УМ
fi /Mnof
Составитель С. Позднухов Редактор И. Касарда Техред М.Ходанич Корректор И. Муска
Заказ 3977/55
Тираж 659
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
