Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в хлопкоуборочных машинах.
Целью изобретения является повьппе ние надежности привода.
На фиг.1 изображен предлагаемый привод, вид сверху; на фиг.2 - разрез А-А на фиг.1.
Привод шпинделей хлопкоуборочного барабана состоит из клиновых ремней 1 и 2, жестко закрепленных на каркасе 3 с помощью пружин 4 растяжения. Клиновые ремни 1 охватывают ролики 5 шпинделей 6, установленных с .возможностью врашения на барабане 7, а клиновые ремни 2 охватывают дополнительные ролики 8, тоже установленные на барабане 7 с возможностью вращения. Ролики 5 и 8 жестко связаны с установленными соосно с ними шестернями 9 и 10 соответственно, при этом шестерни 9 и 10 находятся постоянно в зацеплении друг с другом.
Привод работает следующим образом
При вреидении барабана 7 по стрелке Б ролики 5 набегают на клиновой ремень 1, что обеспечивает их вращение вокруг собственной оси по стрелке В и снятие шпинделями 6 в этой зоне хлопка с кустов. При этом шестерни 9 и 10 передают вращение дополнительным, роликам 8, которые также вращаются вокруг собственной рси по стрелке Г. После того, как ролики 5
,5 .8Л
Ju/
Ю
/
I I I I
перестанут контактировать с клиновыми ремнями 1, происходит набегание роликов 8 на клиновой ремень 2, в результате чего ролики 8 начинают вращаться в противоположную сторону по стрелке Д. При этом-шестерни 9 и 10 передают вращение роликам 5, в результате чего происходит реверсирование шпинделей 6 и вращение их в зоне съема по стрелке Е.
Выполнение клиновых ремней охватывающими обеспечивает одинаковые условия фрикционного взаимодействия как в рабочей зоне, так и в зоне съема, что позволяет стабилизировать вращение шпинделей и повысить долговечность и надежность работы привода.
Формула изобрет-ения
Привод шпинделей хлопкоуборочного барабана, содержащий наружную и внут- реннюю фрикционные дорожки и закрепленные на шпинделях приводные ролики, отличающийся тем, что, с целью повьш1ения надежности в работе, он имеет установленные на бараба
не и кинематически связанные с роликами шпинделей дополнительные ролики, контактирующие с внутренней фрикционной дорожкой, при этом последняя установлена с возможностью охвата своей рабочей поверхностью дополнительных- роликов.
г .5
41
Фаг. 2
Редактор И. Николайчук
Составитель М. Гаврилов
Техред И.Попович Корректор А. Тяско
Заказ 3989/2
Тираж 627Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4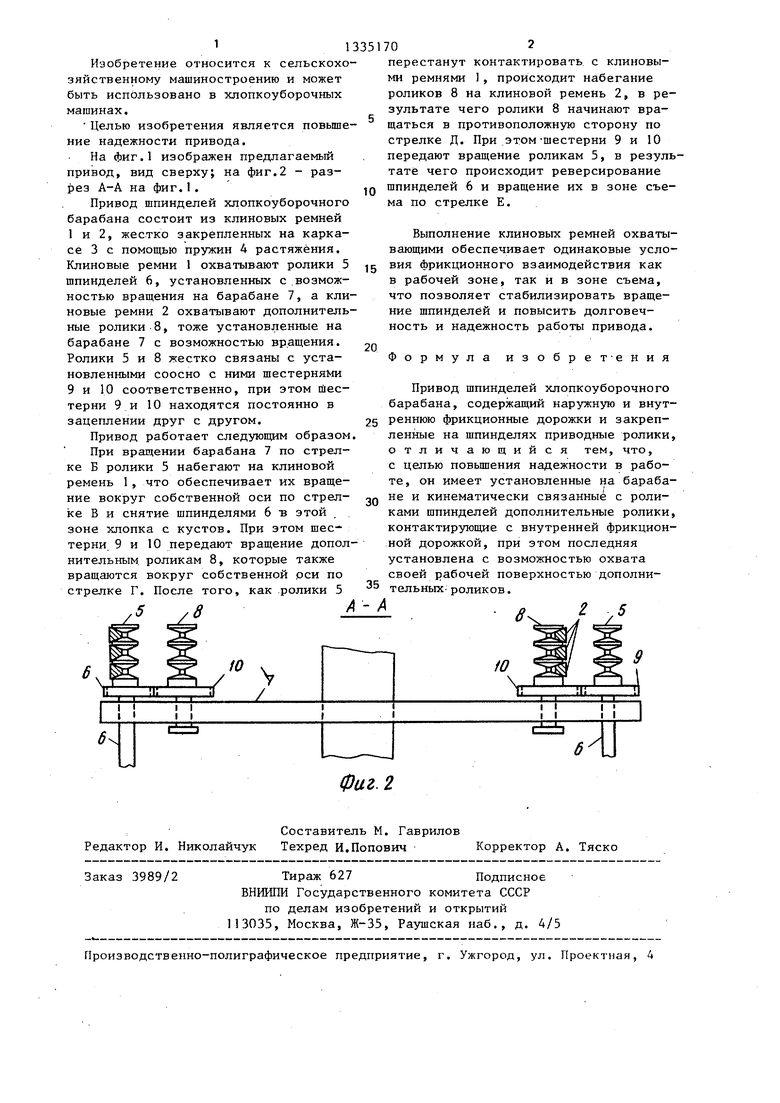
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный барабан хлопкоуборочного аппарата | 1986 |
|
SU1519571A1 |
| Привод шпинделей хлопкоуборочного барабана | 1976 |
|
SU598586A1 |
| Хлопкоуборочная машина | 1949 |
|
SU92896A2 |
| Привод шпинделей хлопкоуборочного барабана | 1989 |
|
SU1665925A1 |
| Привод шпинделей барабана хлопкоуборочного аппарата | 1982 |
|
SU1042654A1 |
| Шпиндельный хлопкоуборочный барабан | 1987 |
|
SU1653609A1 |
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1990 |
|
SU1794383A1 |
| Фрикционный привод | 1972 |
|
SU445394A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1985 |
|
SU1349713A2 |
| Хлопкоуборочный аппарат | 1987 |
|
SU1443848A1 |
Изобретение относится к сельско- хозяйственнол1у машиностроению, может быть использовано в хлопкоуборочных машинах и позволяет повысить надежность и долговечность привода шпинделей. На каркасе 3 аппарата установлены охватывающие клиновые ремни 1 и 2, контактирующие соответственно с роликами 5 и 8, кинематически связанными между собой шестернями 9 и 10. В рабочей зоне шпиндели приводятся во врашение за счет взаимодействия роликов 5 с ремнем 1, а в зоне съема реверсивное вращение передается шпинделю через шестерни 9 и 10 от роликов 8, взаимодействующих с 2.2 ил. (Л 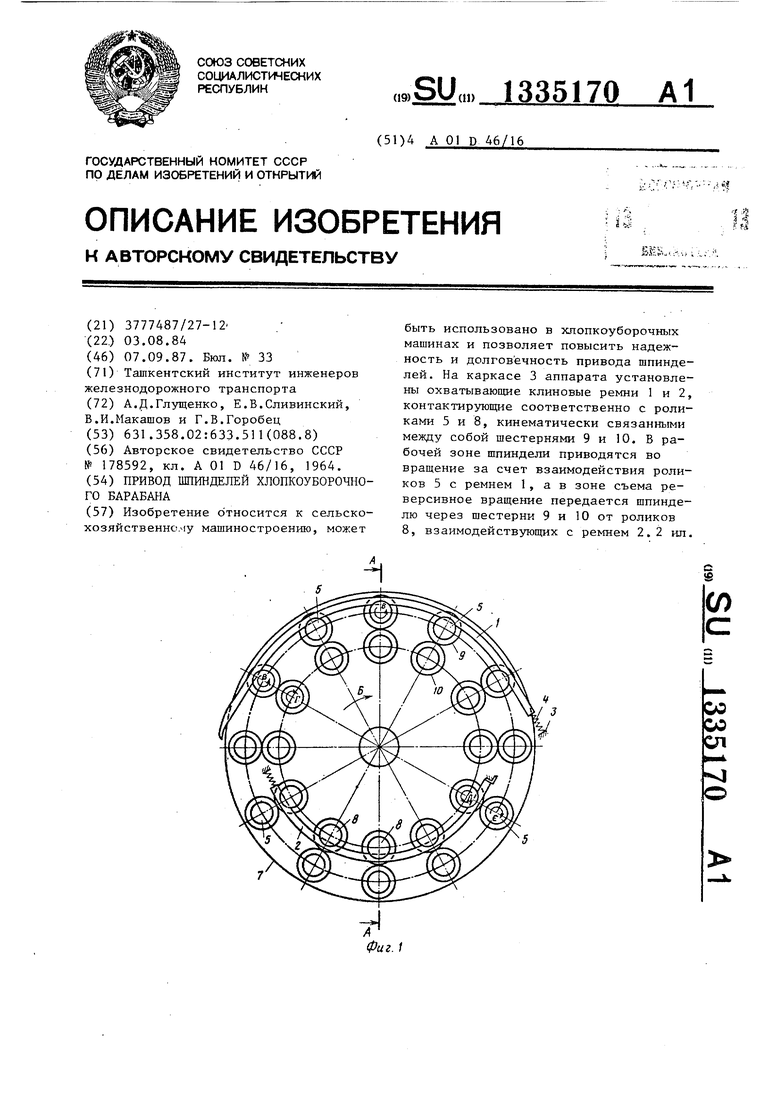
| ПЛТСИТ.-.С- ^rt''^ Ti:X;j;)vj:G;:.i^ **БПыпшп: ^>& | 0 |
|
SU178592A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
