Изобретение относится к контрольно-измерительной технике, является усовершенствованием изобретения но авт. св. № 732821 и может быть использовано для контроля настройки системы регулирования изобретения.
Цель изобретения - повышение точности регулирования.
На чертеже приведена функциональная с.чема устройства для контроля настройки систем регулирования.
Устройство для контроля настройки систем управления содержит блоки 1 и 2 дифференцирования, блоки 3 и 4 вычисления абсолютного значения параметра интеграторы 5-7 инверторы 8-10, усилитель 11 и индикаторы 12-14.
Устройство работает следующим образом.
Сигнал у, равный значению регулируемой величины поступает с первичного измерительного преобразователя на вход блока 1. Сиг- пал у па выходе блока 1, представляю- плий собой производную от регулируемой величины, поступает на вход блока 3, с выхода которого сигнал у , т.е. абсолютное значение производной регулируемой величины, поступает на вход интегратора 5.
Кроме того, на два других входа интегратора 5 поступают сигналы - aili с его выхода через инвертор 8 и -aoli с выхода интегратора 6 через инвертор 9. Таким образом, на вход интегратора 5 поступает сигнал, представляющий собой функцию
Ф1 -а|Г| -- aoli + К l:y {t)I ,,
где Ь - интегральный критерий качества регулирования системы;
I., - нроизводпая интегрального критерия качества;
-ai-ao - коэффициенты перадачи инверторов 8 и 9;
k - коэффициент передачи апериодического звена второго порядка, состоящего из блоков 5, 6, 8 и 9.
С выхода интегратора 6 на вход индикатора 13 поступает сигнал, представляющий собой интегральный критерий качества настройки системы регулирования;
l g()j (i)r
гдeg(т) - весовая функция апериодического усредняющего звена второго порядка; y(t-т) - регулируемая величина;
t - текуш,ее время; С выхода интегратора 5 на вход индикатора 12 ноступает сигнал I l, равный производной от величины критерия качества Ь.
Сигнал, представляющий собой производную от регулируемой величины, поступает с выхода блока 1 на вход блока 2, па выходе которого получаем вторую производную от регулируемой величины у. Сигнал у после преобразования на блоке 4 ноступает на вход
5
0
интегратора 7 в виде абсолютного значения второй производной контролируемого параметра |у j
На другой вход интегратора 7 поступает сигнал с его выхода через инвертор 10. Таким образом, на вход интегратора 7 поступает сигнал, представляющий собой функцию
Ф2 -asb + Х,| y(t) 1 , вспомогательный интегральный критерий качества регулирования системы;
коэффициент передачи инвертора 10; k 1 - коэффициент передачи апериодического звена первого порядка, состоящего из блоков 7 и 10.
С выхода интегратора 7 па вход делителя 11 поступает сигнал, представляющий собой вспомогательный критерий качества настройки систем ре1 улирования:
0 где
-а2
5
0
g() I у (t-T) ёг.
о
На второй вход делителя 11 поступает сигнал, пропорциональный критерию Ii:
Ii I g() I y (t-T) I dT При подаче на вход устройства гармонического сигнала
у С+ Asincot, где А, (О - амплитуда и частота колебаний
регулируемой величины; С -- постоянный коэффициент, величины критериев I| и будут равны:
соответственно
Ii А-ы
:(т)
12 А-ОГ g(T)
со5ш(1-т) I dr; I sinco(t-т) I dr
40
Таким образом, с выхода делителя 11 на вход индикатора 4 будет поступать сигнал, пропорциональный частоте колебаний регулируемой величины у относительно некоторого ее значения:
Ь
а со.
где а - постоянный коэффициент.
При этом в процессе настройки и эксплуатации системы регулирования оператор должен следить по показаниям индикатора 14 затем, чтобы выполнялось неравенство , где шкр - некоторая критическая частота колебаний регулируемой величины, значение которой выбирается исходя из эксплуатационных характеристик элементов системы регулирования.
55
Формула изобретения
Устройство для контроля настройки систем регулирования по авт. св. № 732821, отличающееся тем, что, с целью повышения
1335938
34
точности регулирования параметров, в негония параметра, соединенного выходом с переведены третий индикатор, делитель, третийвым входом третьего интегратора, подклю- инвертор, третий интегратор, второй блок вы-ценного вторым входом к выходу третье- числения абсолютного значения параметра иго элемента НЕ, соединенного входом с вы- второй блок дифференцирования, подклю-5 ходом третьего интегратора и первым вхо- ченный входом к выходу первого блока диф-дом усилителя, подключенного вторым вхо- ференцирования, а выходом - к входу вто-дом к выходу второго интегратора, а выхо- рого блока вычисления абсолютного значе-дом - к входу третьего индикатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля настройки систем регулирования | 1977 |
|
SU732821A1 |
| Устройство для автоматическогоупРАВлЕНия Об'ЕКТАМи C TPAHC-пОРТНыМ зАпАздыВАНиЕМ | 1979 |
|
SU796789A2 |
| Устройство для функционального контроля систем управления | 1987 |
|
SU1479914A1 |
| Устройство для настройки регуляторов | 1980 |
|
SU938256A1 |
| Адаптивный регулятор | 1987 |
|
SU1432459A1 |
| Регулирующее устройство | 1976 |
|
SU647650A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Самонастраивающаяся система для регулирования объектов с запаздыванием | 1984 |
|
SU1236422A1 |
| Двухканальное программно-задающее устройство | 1982 |
|
SU1133584A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
Изобретение относится к контрольно-измерительной технике и может быть иснользо- вано для контроля настройки системы регулирования. Целью изобретения является повышение точности регулирования и надежности работы элементов системы регулирования. Поставленная цель достигается тем, что устройство содержит блоки дифференцирования 1 и 2, блоки 3 и 4 вычисления абсолютного значения параметра, интеграторы 5-7 инверторы 8-10. делитель 11, индикары 12-14, что повышает качество регулирования. 1 ил. оо со СП СО со 00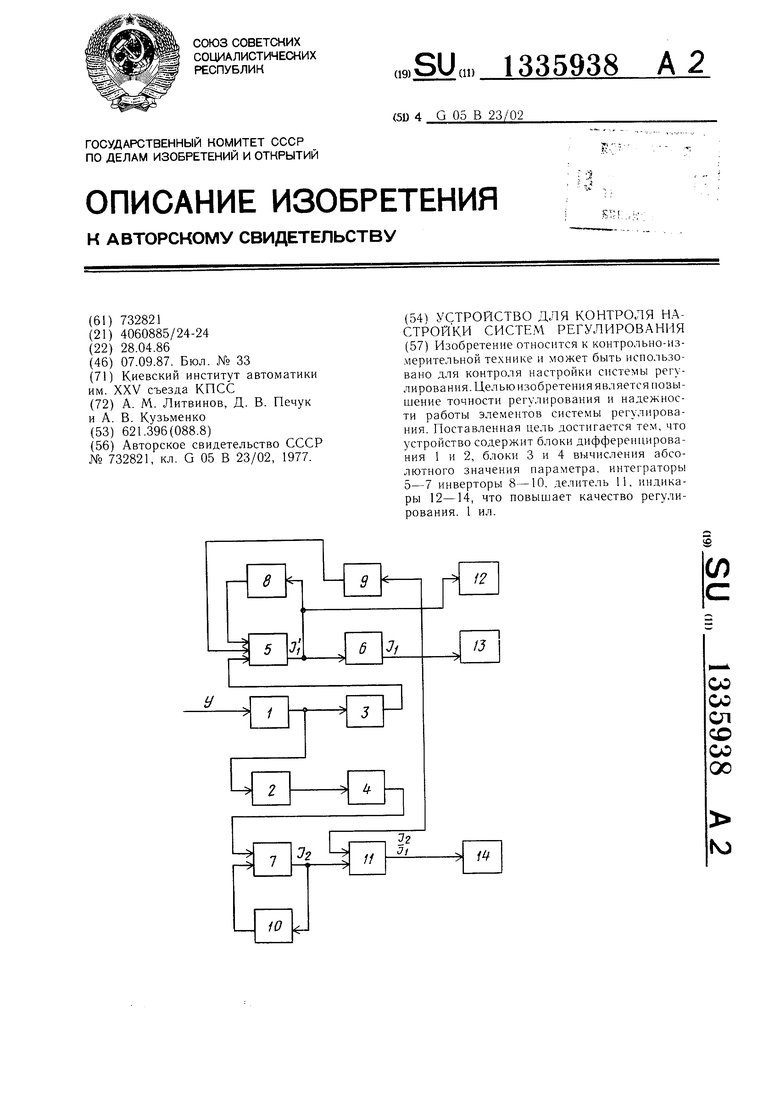
| Устройство для контроля настройки систем регулирования | 1977 |
|
SU732821A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
