Изобретение относится к автоматике и может использоваться в системах регулирования объектов с нестационарным запаздыванием, с широким диапазоном изменения обобщенных параметров регулируемого процесса и возмущающих воздействий.
Цель изобретения - повышение точности регулирования и расширение области применения самонастраивающейся системы для регулирования объектов с запаздыванием за счет обеспечения временной коррекции на управляющее воздействие путем учета скорости изменения сигналов на выходе объекта и формирования величины управляющего воздействия, пропорционального сумме сигналов, различных по знаку и выработанных для прошедшего текущего моментов времени.
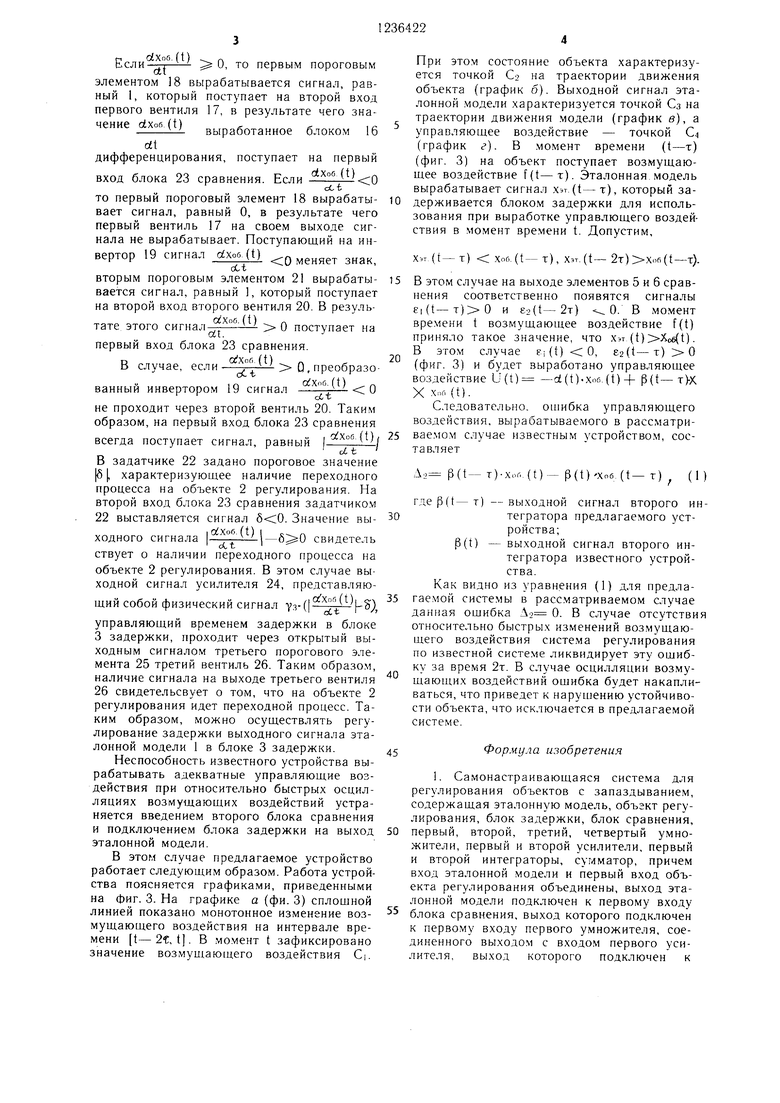
На фиг. 1 приведена блок-схема системы; на фиг. 2 - блок-схема блока регулирования времени задержки, вариант; на фиг. 3 - графики изменения сигналов системы регулирования, иллюстрирующие работу предлагаемой и известной систем.
Система содержит эталонную модель , объект 2 регулирования, блок 3 задержки, блок 4 регулирования времени задержки., первый блок 5 сравнения, второй блок 6 сравнения, первый умножитель 7, первый усилитель 8, первый интегратор 9, второй умножитель 10, третий умножитель 11, второй усилитель 12, второй интегратор 13, четвертый умножитель 14, сумматор 15.
Блок 4 регулирования времени задержки включает в себя блок 16 дифференцирования, первый вентиль 17, первый пороговый элемент 18, инвертор 19, второй вентиль 20, второй пороговый элемент 21, задат- чик 22, блок 23 сравнения, усилитель 24, третий пороговый элемент 25, третий вентиль 26.
Система работает следующим образом. На вход эталонной модели 1 поступает значение внешнего воздействия f(t). Выходной сигнал эталонной модели 1 Хэт. (t), представляющий собой прогнозное значение выходного сигнала объекта 2 после осуществления внешнего воздействия y(t), поступает на первый вход первого блока 5 сравнения и на вход блока 3 задержки. Поскольку блок 3 задержки сдвигает сигнал во времени на величину т, определенную в блоке 4 регулирования времени задержки, на первый вход второго блока 6 сравнения в момент времени t поступает значение выходного сигнала эталонной модели 1 хат. (tT), выработанное в момент времени {t- т). Значение X3T,(t-т) представляет собой прогнозное значение выходного сигнала объекта 2 после осуществления внешнего воздействия f{t-т), т.е. значение выходного сигнала объекта 2 в момент времени t хоб(1). В первом и втором блоках 5 и 6 сравнения выработанные эталонной моделью 1 сигналы хэт.(1| и Кэт {t-т) соответственно сравниваются со значением выходного сигнала объекта 2 xo6.(t), поступающего на вторые входы данных блоков.
Выходной сигнал первого блока 5 сравнения вида 61 (t) .({)-x«.(t) поступает
. на подключенную к выходу данного блока цепочку элементов 7-10, где вырабатывается управляющий сигнал для регулирования объекта при внешнем воздействии (t). Выход первого умножителя 7, равный хоб (t) 61 (t), поступает на первый усилитель
8, на выходе которого получается сигнал (-7i) «(t)-8i (t). Первый интегратор 9 интегрирует уравнение
a:(t) -Yi-xo6,(t)-8i(t), oi(0)0
и его выходной сигнал (t) умножается на втором умножителе 10 наХоб(1).На выходе второго умножителя 10 получается сигнал, равный а;(1)-хоб. (t).
Выходной сигнал второго блока 6 срав- 0 нения вида Si (t -«) х«г (t)-XST (t) поступает на подключенную к выходу данного бло. ка цепочку элементов 11 -14, где вырабатывается управляющий сигнал для корректировки управляющего воздействия U(t(r), выработанного системой в момент времени (t - t). Выход третьего умножителя 11, равный (1:) t (t-г), поступает на второй усилитель 12, выходной сигнал которого равен (-- YI) ХскГ (t) i(t-г). Второй интегра тор 13 интегрирует уравнение.
(t-T)72-xo6.(t).e2(t-T), (0)0
и его выходной сигнал (t-т) умножается в четвертом умножителе 14 на Хоб (t).
Выходные сигналы второго и четвертого умножителей 10 и 14 поступают на входы сумматора 15, где вырабатывается управ- ЛЯЮЩИ1Й сигнал как сумма сигналов со второго и четвертого умножителей LJ(t) cl(t)-xoG.(t) + p{t-T).xoc.(t), который поступает на объект 2 регу.тирования. 0 Время задержки вырабатывается блоком 4 регулирования времени задержки следую- плим образом. Выходной сигнал объекта 2 регулирования поступает на блок 16 дифференцирования, на выходе которого образуется
5
0
5
d xofi.(t)
5 первая производная-V
Поскольку первая производная выходного сигнала объекта 2 характеризует скорость изменения данного сигнала, то ее нахождение в некоторой области свидетельствует о нахождении объекта 2 регулирования в стадии переходного процесса. Однако поскольку при переходном процессе выходной сигнал объекта 2 регулирования может как возрастать, так и убывать, первая производная может иметь как положительное, так и отрицательное значение. В этой связи необходимо получение абсолютной величины первой производной. Это осуществляется элементами 17-21.
Если- j О, то первым пороговым
элементом 18 вырабатывается сигнал, равный 1, который поступает на второй вход первого вентиля 17, в результате чего значение ctxofi.(t) выработанное блоком 16
dt дифференцирования, поступает на первый
вход блока 23 сравнения. Если 0
сС t
то первый пороговый элемент 18 вырабатывает сигнал, равный О, в результате чего первый вентиль 17 на своем выходе сигнала не вырабатывает. Поступающий на инвертор 19 сигнал dxo6.(t) Q знак,
oCt
вторым пороговым элементом 21 вырабатывается сигнал, равный 1, который поступает на второй вход второго вентиля 20. В резуль- .( поступает на
тате этого сигнал
ai.
первый вход блока 23 сравнения.
В случае, если
rfxoejt) dlt
Q,преобразованный инвертором 19 сигнал
ЙХоб. (t) oCt
0
не проходит через второй вентиль 20. Таким образом, на первый вход блока 23 сравнения
всегда поступает сигнал, равный ) J
В задатчике 22 задано пороговое значение |б |, характеризующее наличие переходного процесса на объекте 2 регулирования. На второй вход блока 23 сравнения задатчиком 22 выставляется сигнал . Значение выI OiXofl. (t) Iс- (Л
ходного сигнала | ,... свидетель ствует о наличии переходного процесса на объекте 2 регулирования. В этом случае выходной сигнал усилителя 24, представляющий собой физический сигнал уз-(Г У i ),
управляющий временем задержки в блоке 3 задержки, проходит через открытый выходным сигналом третьего порогового элемента 25 третий вентиль 26. Таким образом, наличие сигнала на выходе третьего вентиля 26 свидетельсвует о том, что на объекте 2 регулирования идет переходной процесс. Таким образом, можно осуществлять регулирование задержки выходного сигнала эталонной модели 1 в блоке 3 задержки.
Неспособность известного устройства вырабатывать адекватные управляющие воздействия при относительно быстрых осцил- ляциях возмущающих воздействий устраняется введением второго блока сравнения и подключением блока задержки на выход эталонной модели.
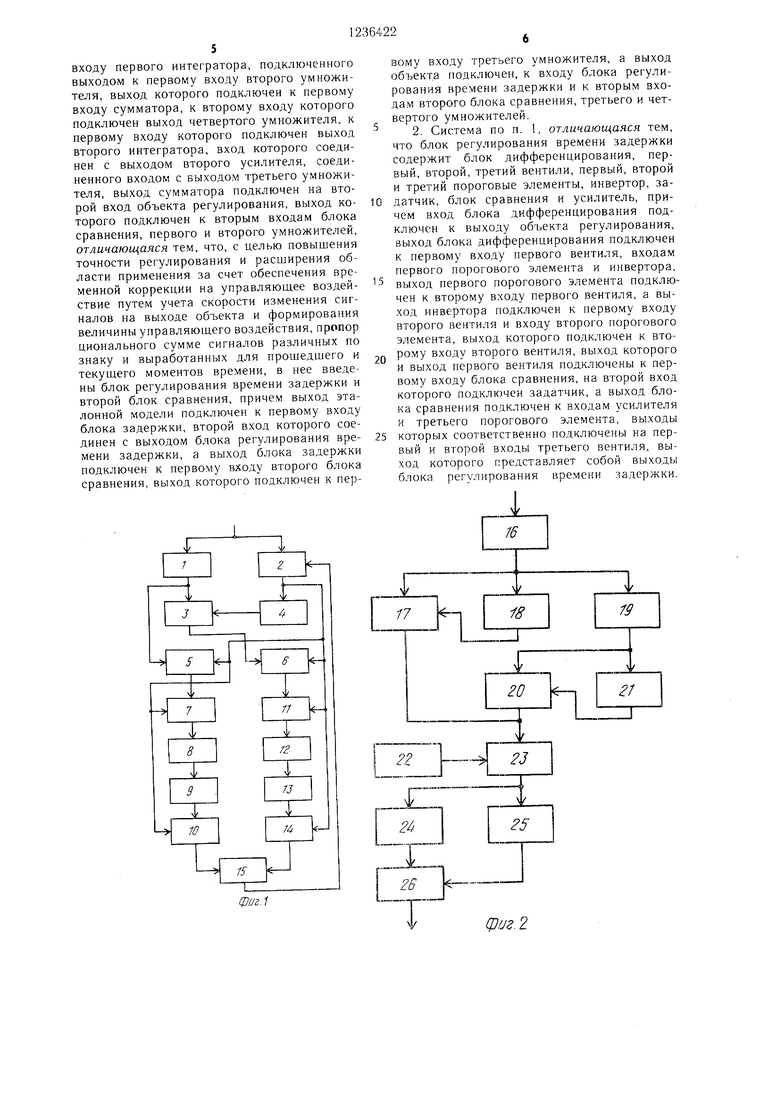
В этом случае предлагаемое устройство работает следующим образом. Работа устройства поясняется графиками, приведенными на фиг. 3. На графике а (фи. 3) сплощной линией показано монотонное изменение возмущающего воздействия на интервале времени t-2t, i. В момент t зафиксировано значение возмущающего воздействия Ci.
20
При этом состояние объекта характеризуется точкой С-2 на траектории движения объекта (график б). Выходной сигнал эталонной модели характеризуется точкой Сз на траектории движения модели (график в), а управляющее воздействие - точкой С (график г). В момент времени (t-т) (фиг. 3) на объект поступает возмущающее воздействие f(t-т). Эталонная, модель вырабатывает сигнал хэт.(t-т), который за- 10 держивается блоком задержки для использования при выработке управлющего воздействия в момент времени t. Допустим,
х,т((-т) xoG.(t-т), X3T.(t-2т)хог,((--т).
15 В этом случае на выходе элементов 5 и 6 сравнения соответственно появятся снгналы ei(t--T)0 и 62(1-2т) 0. В момент вре.мени t возмущающее воздействие f(t) приняло такое значение, что хэт (t)Xc6(t). В этом случае ei (t) О, е2((--т)0 (фиг. 3) и будет выработано управляющее воздействие U(t) -ci(t).xo5.(t) + p( X x.6(t).
Следовательно, ошибка управляющего воздействия, вырабатываемого в рассматри25 вае.мом случае известным устройством, составляет
Л2 P(t- T)-Xof.,(t) - P(t) Xo6,(t- т) (1 )
гдер(1-т) -выходной сигнал второго ин- 30тегратора предлагаемого устройства;
P(t) - выходной сигнал второго интегратора известного устройства.
Как видно из уравнения (1) для предла- 35 гаемой системы в рассматриваемом случае данная ошибка А2 0. В случае отсутствия относительно быстрых изменений воз.мущаю- щего воздействия система регулирования по известной системе ликвидирует эту ошибку за время 2т. В случае осцилляции возму- щающих воздействий ошибка будет накапливаться, что приведет к нарушению устойчивости объекта, что исключается в предлагаемой системе.
45
Формула изобретения
1. Самонастраивающаяся система для регулирования объектов с запаздыванием, содержащая эталонную модель, объгкт регулирования, блок задержки, блок сравнения,
первый, второй, третий, четвертый умножители, первый и второй усилители, первый и второй интеграторы, сумматор, причем вход эталонной модели и первый вход объекта регулирования объединены, выход эталонной модели подключен к первому входу
блока сравнения, выход которого подключен к первому входу первого умножителя, соединенного выходом с входом первого усилителя, выход которого подключен к
входу первого интегратора, подключенного выходом к первому входу второго умножителя, выход которого подключен к первому входу сумматора, к второму входу которого подключен выход четвертого умножителя, к первому входу которого подключен выход второго интегратора, вход которого соединен с выходом второго усилителя, соединенного входом с выходом третьего умножителя, выход сумматора подключен на второй вход объекта регулирования, выход которого подключен к вторым входам блока сравнения, первого и второго умножителей, отличающаяся тем, что, с целью повышения точности регулирования и расширения области применения за счет обеспечения временной коррекции на управляющее воздействие путем учета скорости изменения сигналов на выходе объекта и формирования величины управляющего воздействия, пропор ционального сумме сигналов различных по знаку и выработанных для прошедщего и текущего моментов времени, в нее введены блок регулирования времени задержки и второй блок сравнения, причем выход эталонной модели подключен к первому входу блока задержки, второй вход которого сое5
вому входу третьего умножителя, а выход объекта подключен, к входу блока регулирования времени задержки и к вторым входам второго блока сравнения, третьего и четвертого умножителей.
2. Система по п. 1, отличающаяся тем, что блок регулирования времени задержки содержит блок дифференцирования, первый, второй, третий вентили, первый, второй и третий пороговые элементы, инвертор, за- 10 датчик, блок сравнения и усилитель, причем вход блока дифференцирования подключен к выходу объекта регулирования, выход блока дифференцирования подключен к первому входу первого вентиля, входам первого порогового элемента и инвертора, выход первого порогового элемента подключен к второму входу первого вентиля, а выход инвертора подключен к первому входу второго вентиля и входу второго порогового элемента, выход которого подключен к второму входу второго вентиля, выход которого и выход первого вентиля подключены к первому входу блока сравнения, на второй вход которого подключен задатчик, а выход блока сравнения подключен к входам усилителя и третьего порогового элемента, выходы
15
20
дивен с выходом блока регулирования вре-25 которых соответственно подключены на пермени задержки, а выход блока задержкивый и второй входы третьего вентиля, выподключен к первому входу второго блокаход которого представляет собой выходы
сравнения, выход которого подключен к пер-блока регулирования времени задержки.
вому входу третьего умножителя, а выход объекта подключен, к входу блока регулирования времени задержки и к вторым входам второго блока сравнения, третьего и четвертого умножителей.
2. Система по п. 1, отличающаяся тем, что блок регулирования времени задержки содержит блок дифференцирования, первый, второй, третий вентили, первый, второй и третий пороговые элементы, инвертор, за- датчик, блок сравнения и усилитель, причем вход блока дифференцирования подключен к выходу объекта регулирования, выход блока дифференцирования подключен к первому входу первого вентиля, входам первого порогового элемента и инвертора, выход первого порогового элемента подключен к второму входу первого вентиля, а выход инвертора подключен к первому входу второго вентиля и входу второго порогового элемента, выход которого подключен к второму входу второго вентиля, выход которого и выход первого вентиля подключены к первому входу блока сравнения, на второй вход которого подключен задатчик, а выход блока сравнения подключен к входам усилителя и третьего порогового элемента, выходы
(Pf/2.1
а
f(t-2r
fit)
Xodt-r) Mlfg,, Xod() odff),
6
V/-/ry
)
t-2Ti-T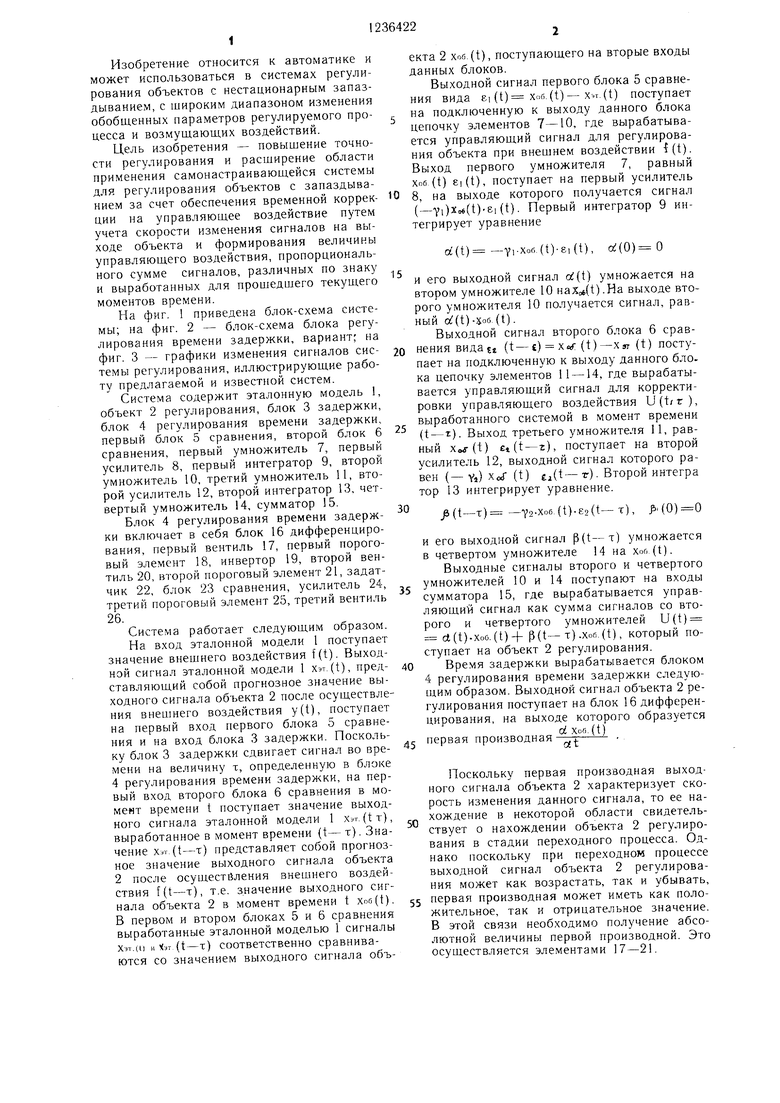
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| СПОСОБ КОРРЕКЦИИ НЕЛИНЕЙНЫХ ПРЕДЫСКАЖЕНИЙ ЦВЕТОРАЗНОСТНЫХ СИГНАЛОВ СЕКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2206184C2 |
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| ОПТИМАЛЬНЫЙ РЕГУЛЯТОР | 1996 |
|
RU2105341C1 |
| Самонастраивающаяся следящая система | 1983 |
|
SU1167583A1 |
| Устройство для частотного преобразования импульсных сигналов | 1977 |
|
SU692072A1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ СЛОЖНЫМИ ОРГАНИЗОВАННЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2435187C2 |
Изобретение относится к автоматике и может использоваться в системах регулирования объектов с нестационарным запаздыванием с широким изменением обобщенных параметров регулируемого процесса и возмущающих воздействий. Включение эталонной модели в систему управления делает возможным перестройку системы управления объектом при быстрых изменениях возмущающих воздействий. Повыщение точности регулирования объектов с запаздыванием достигается путем введения второго блока сравнения и блока регулирования времени задержки. Это обеспечивает установление времени задержки в системе, равного фактической длительности переходного процесса на объекте, а также возможность выработки адекватных управляющих воздействия при высокой частоте изменений состояний объекта, не допускающих выхода объекта регулирования за границы его устойчивости. 1 з.п. ф-лы, 3 ил. (О (Л IN:) оо 05 4 ГчЭ ГО
U(t-r)
l/W ,
l/it- f
1-24t-rt
Фиг. Ь
/
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ | 0 |
|
SU301689A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
