Изобретение относится к системам регулирования возбуждения синхронных машин, снабженных быстродействующим возбудителем и автоматическим регулятором возбуждения сильного действия (АРВ-СД).
Известны автоматические регуляторы возбуждения, которые используют для стабилизации системы регулирования производные таких режимных параметров как частота, период, первая и вторая производная угла нагрузки и т. д. Они снабжены элементами, измеряющими и формирующими эти стабилизирующие параметры 1, 2.
Известен стабилизатор для регулятора возбуждения синхронной мащины, содержащий измерительные датчики поперечной составляющей напряжения и продольной составляющей тока статора, соединенные через дифференциаторы с сумматором 3j.
Недостатко.м известного стабилизатора, формирующего из режимных параметров стабилизирующий сигнал, является сложность и недостаточная точность из-за наличия таких элемелтов как блоки перемножения и формирователи.
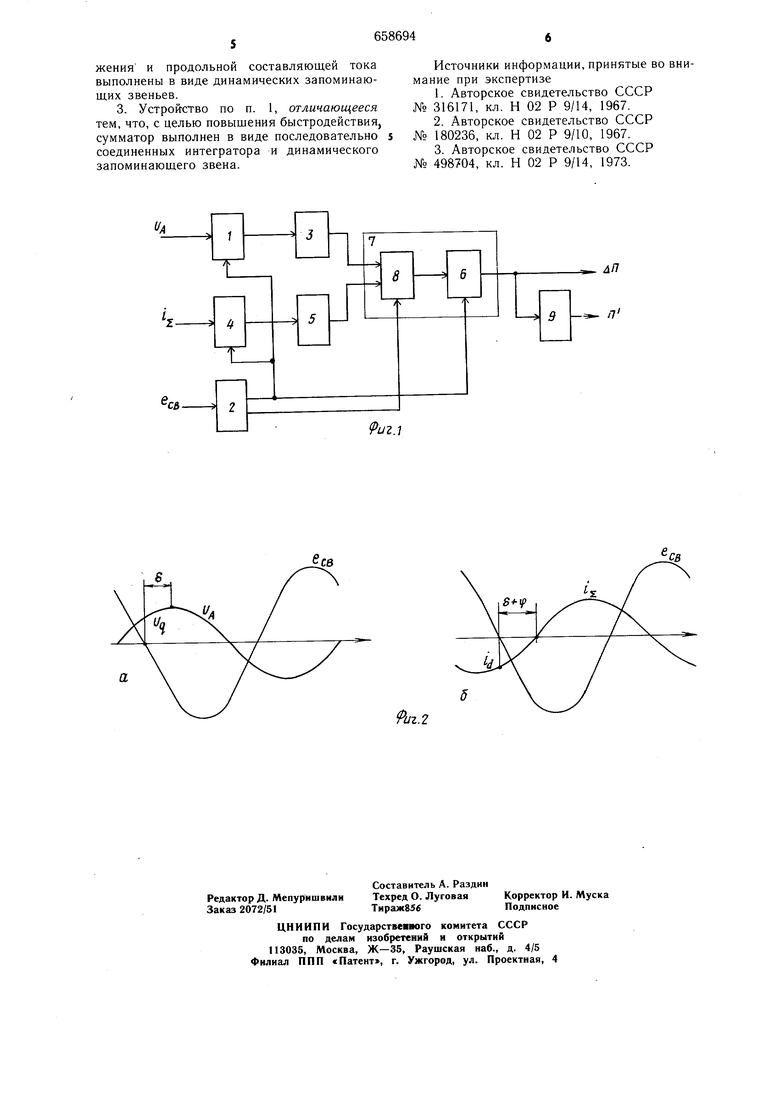
С целью упрощения схемы и повыщения точности, стабилизатор для регулятора возбужд,ения синхронной мащины, содержащий измерительные датчики поперечной составляющей напряжения и продольной составляющей тока статора, соединенные через дифференциаторы с сумматором, снабжен датчиком управляющих импульсов синфазных ЭДС синхронной мащины, один из выходов которого подключен к управляющему входу датчика поперечной составляющей напряжения,к управляющему входу датчика продольной составляющей тока статора и к одному из входов сумматора, а другой выход присоединен к другомч/ входу сумматора, причем датчики и сумматор вь1полнены дискретными. Кроме того, с целью упрощения измерения, датчики поперечнойсоставляющей напряжения и продольной составляющей тока выполнены в виде динамических запоминающих звеньев, а с целью повыщения быстродействия, сумматор выполнен в виде последовательно соединенных интегратора и динамического запоминающего звена. На фиг. 1 приведена блок-схема стабилизатора для регулятора возбуждения синхронной машины; на фиг. 2 изображена временная диаграмма. Блок-схема стабилизатора (фиг. 1) содержит дискретный датчик 1 поперечной составляющей напряжения U, представляющий собой аналоговое динамическое запоминающее звено (ДЗЗ), имеющее информационный и управляющий входьг и аналоговый выход, первый из которых подключен к источнику сигнала U, второй - к датчику импульсов 2, а третий - к дифференциатору 3; дискретный датчик 4 продольной составляющей тока i, представляющий собой аналогичное ДЗЗ, подключенное соответственными выводами к источнику сигнала i, к датчику импульсов 2 и к дифференциатору 5; датчик 2 управляющих импульсов, подключённый по входу к источнику сигнала есв синфазного ЭДС синхронной машины, по первому выходу - к управляющим входам датчиков 1, 4 и ДЗЗ 6 сумматора 7, по второму выходу - к интегратору 8; сумматор 7, состоящий из управляемого интегратора 8 и аналогового динамического запоминающего звена 6; дифференциатор 9, подключенный к ДЗЗ 6. На фиг. 2 и в описании приняты следующие обозначения: UA - напр яжение статора i, - расчетный суммарный ток статора; е„-линейное напряжение углоизмерительНОИ машины; 6,9 - внутренний угол и угол нагрузки; xcj, - синхронное поперечное сопротивление статора; гх„ - коэффициент, равный сопротивлению х, Uc, id.- искомые составляющие напряжения U и тока JA. Устройство работает следующим образом. Устройство формирует сигналы cтaбИv изирующего параметра А П и его производной П, причем первый в виде суммы сигналов, взятой с обратным знаком производной поперечной составляющей напряжения UcJ и производной продольной составляющей тока 1,умноженной на коэффициент, равный сопротивлению энергосистемы, подключенной к шинам электростанции, то есть А n -(,). Дискретные датчики 1 и 2 составляющих ис(,и i(J фиксируют каждый период мгновенные значения переменных сигналов, пропорциональных напряжению и току статора, в те моменты времени, когда эти значения равны искомым составляющим. Как видно из фиг. 2,мгновенные значения сигналов напряжения и тока равны или пропорциональны искомым составляющим и и ie( в момент перехода через нуль напряжения углоизмерительной мащины есвиз положительного полупериода в отрицательный. Запоминаемые сигналы (фиг. 1) поступают далее на дифференциаторы 3, 5 и затем с их выходов на входы управляемого интегратора 8. Последний интегрирует получаемую сумму сигналов в течение периода дискретности. В конце периода одновременно с обновлением информации в ДЗЗ датчиков 1 и 4 происходит считывание напряжения в ДЗЗ 6 с выхода интегратора. Это напряжение пропорционально среднему за период от суммы, поступающей на вход интегратора, с ощибкой, зависящей от изменения частоты. В обычных режимах регулирования частота изменяется относительно мало и ошибка не превышает 1-2°/о от получаемой величины сигнала, что является вполне допустимым, После считывания и обновления информации происходит сброс интегратора и установка его начальных условий по сигналу от датчика импульсов 2. Применение такого суммирующего и фильтрующего звена позволяет получить высокое быстродействие при малом уровне пульсаций выходного сигнала. С выхода устройства сигнал Д П поступает на вход суммирующего усилителя АРВСД, а также на вход дифференциатора 9, образующего сигнал производной П, подаваемый также на вход суммирующего усилителя АРВ-СД. Дифференциатор 5 образует сигнал производной с учетом коэффициента Хадg случае, когда углоизмерительная мащ отсутствует, сигнал е вможет быть образован с помощью фантомной схемы, осуществляющей суммирование переменных сигналов напряжения Ute и тока JA с коэффициентом ГЗГх(, т. е. есв tJee - . Применение настоящего устройства позволяет получить высокое быстродействие при малом уровне пульсаций выходного сигналаФормула изобретения 1.Стабилизатор для регулятора возбуждения синхронной мащипы, содержащий измерительные датчики поперечной составляющей напряжения и продольной составляющей тока статора, соединенные через дифференциаторы с сумматором, отличающийся тем, что, с целью упрощения схемы и повыщения точности, он снабжен датчиком управляющих импульсов синфазных ЭДС синхронной мащины, один из выходов которого подключен к управляющему входу датчика поперечной составляющей напряжения, к управляющему входу датчика продольной составляющей тока статора и к одному из входов сумматора, а другой выход присоединен к другому входу сумматора, причем датчики тока и напряжения и сумматор выполнены дискретными. 2.Устройство по п. 1, отличающееся тем, что, с целью упрощения измерения, датчики поперечной составляющей напряжения и продольной составляющей тока выполнены в виде динамических запоминающих звеньев.
3. Устрой-cYBo по п. 1, отличающееся тем, что, с целью повыщения быстродействия, сумматор выполнен в виде последовательно соединенных интегратора и динамического запоминающего звена.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 316171, кл. Н 02 Р 9/14, 1967.
2.Авторское свидетельство СССР № 180236, кл. Н 02 Р 9/10, 1967.
3.Авторское свидетельство СССР № 498704, кл. Н 02 Р 9/14, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465716C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2002 |
|
RU2237346C2 |
| Устройство для ограничения минимального уровня возбуждения синхронной машины | 1977 |
|
SU663059A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2289196C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Устройство для формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины | 1987 |
|
SU1510062A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
а
иг.2
