Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения самоходных агрегатов.
Целью изобретения является улучшение прямолинейности вождения путем устранения ложных изменений курса.
На фиг. 1 изображена блок-схема
устройства; на фиг. 2 - временные на и сигнальные входы Сигнал ис- граммы сигналов.полнительного механизма 4 усредниетУстройство для автоматического вож- ся, осуществляя равномерно-взвешенное
усреднение по рааииряющемуся текущем интервалу времени от t до t. , обр 15 зуя на своих выходах непрерывно результат усреднения m. в темпе со вхо ной информацией.
Моменты обнуления второго и посл дующих блоков 12 сдвинуты относител но момента обнуления первого блока
20
на т
2 Т
N 0
- Т N °
соответстве
но, где N - число блоков 12, п - 1,2,3,...,N. Сдвиг по времени осу 25 ществляется идентичными блоками 10 сдвига. Логика работы такова, что очередной сигнал квантования способ ствует запоминанию результата усред нения т., а затем через короткий пр
30
дения самоходных агрегатов содержит чувствительный элемент 1, сумматор 2 преобразователя, преобразователь 3 сигнала, исполнительный механизм 4, самоходньй агрегат 5, аналог 6 самоходного агрегата, сумматор 7 центрования и вычислитель 8 текущего среднего значения, содержащий квантователь 9, блоки 10 сдвига, блоки 1.1 малых временных сдвигов, блоки 12 текущего усреднения, блоки 13 коммутаторов, блоки 14 запоминающих устройств и сумматор 15 усреднения.
Устройство работает следующим образом.
Сигнал рассогласования между заданной и действительной траекториями- копирующей точки агрегата, вырабатываемый чувствительным элементом 1 через сумматор 2 преобразователя поступает на преобразователь 3, где усиливается и преобразуется в соответствии с требуемым алгоритмом управления в управляющий сигнал, который воздействует на исполнительный механизм 4, .осуществляя при этом поворот самоходного агрегата в заданном направлении, приближая траекторию движения копирую- Q щей точки к заданной.реднять текущее значение до следуюЭтим замыкается контур слежения за щего цикла запоминания, траекторией, задаваемой базовой линией в виде следа предыдущего прохода на местности.
Одновременно сигнал управляющего воздействия исполнительного механизма 4 поступает на сумматор 7 центрирования, 1 де из него вычитается текущее среднее значение этого сигнала, ц„ формируемое следующим образом. Сигнал
межуток времени t г г: Тр, определя емый блоком 11, обнуляет первьш блок 12 текущего усреднения. Затем через равные промежутки времени 1
35 - т
N
запоминаются сигналы с выхода
второго и последующих блоков 12, ко торые вслед за запоминанием через
t :г - TO обнуляются и начинают усТаким образом, на входах сумма- 45 тора 15 усреднения сохраняются сигна лы, соответствующие моментам запоминания результатов усреднения, которые суммируются, образуя сигнал, рав ный
ll + ... + Гйц
JN
исполнительного механизма 4 запускает квантователь 9, который тактирует работу таким образом, что в равностоящие моменты времени t блоки 13 коммутаторов переписывают в запоминающие устройства 14 сигналы с выходов блоков 12 текущего усреднения, при этом на выходах блоков 14 запоминающих устройств сохраняются сигналы, соответствующие моменту запоминания. Затем {через короткие промежутки времени) тактирующим сигналом, прошедшим блоки 11 малых временных сдвигов, блоки 12 текущего усреднения сбрасываются в ноль.
Все блоки 12 идентичны. Поступаюусреднение по рааииряющемуся текущему интервалу времени от t до t. , обра- 15 зуя на своих выходах непрерывно результат усреднения m. в темпе со входной информацией.
Моменты обнуления второго и последующих блоков 12 сдвинуты относительно момента обнуления первого блока 12
20
т
2 Т
N 0
- Т N °
соответственно, где N - число блоков 12, п - 1,2,3,...,N. Сдвиг по времени осу- 25 ществляется идентичными блоками 10 сдвига. Логика работы такова, что очередной сигнал квантования способствует запоминанию результата усреднения т., а затем через короткий реднять текущее значение до следую30
Q реднять текущее значение до следуюмежуток времени t г г: Тр, определяемый блоком 11, обнуляет первьш блок 12 текущего усреднения. Затем через равные промежутки времени 1
35 - т
N
запоминаются сигналы с выхода
реднять текущее значение до следуювторого и последующих блоков 12, которые вслед за запоминанием через
t :г - TO обнуляются и начинают усщего цикла запоминания,
Таким образом, на входах сумма- тора 15 усреднения сохраняются сигналы, соответствующие моментам запоминания результатов усреднения, которые суммируются, образуя сигнал, равный
ll + ... + Гйц
JN
С выхода сумматора 15 усреднения сигнал поступает на второй вход сумматора 7 центрирования. Центрирован- gg ный сигнал с выхода сумматора 7 поступает на вход аналога 6 тракторного агрегата, преобразуется в курсовой сигнал и с выхода аналога 6 поступает на сумматор 2 преобразователя, где
автоматически вычитается из сигнала основной цепи управления.
Этим уменьшается реакция всей системы на ошибки слежения, что сглаживает искривление траекторий движения и улучшает тем самым прямолинейность вождения.
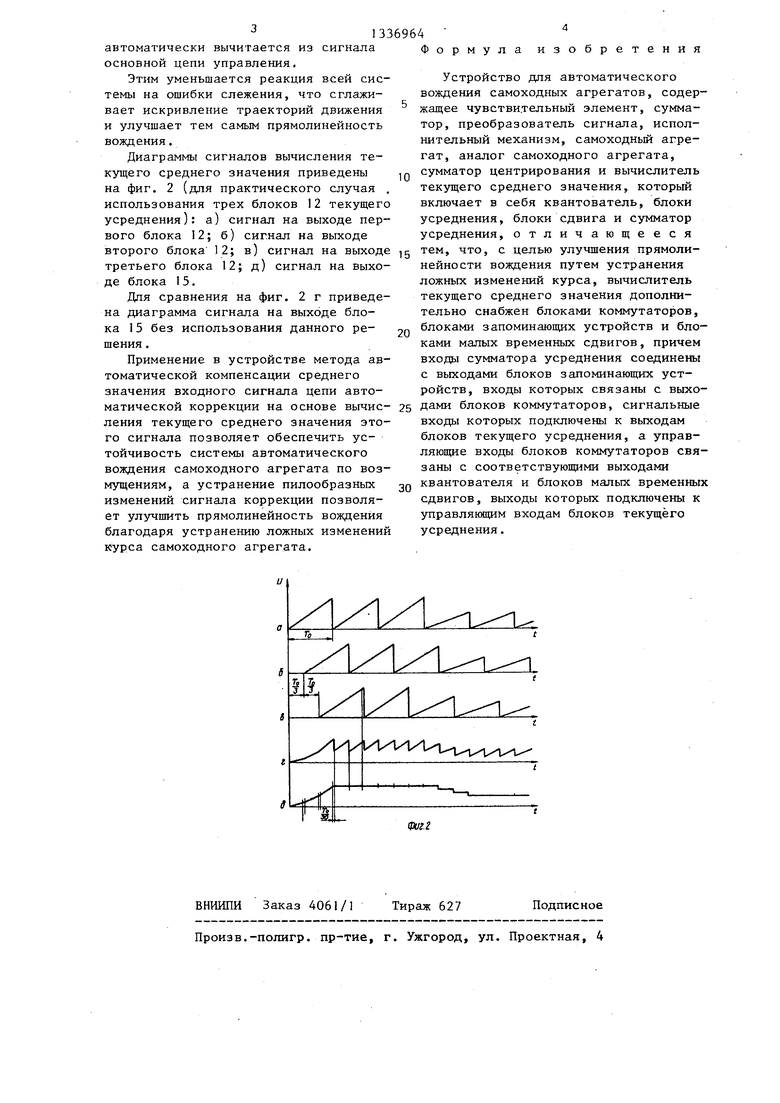
Диаграммы сигналов вычисления текущего среднего значения приведены на фиг. 2 (для практического случая использования трех блоков 12 текущего усреднения): а) сигнал на выходе первого блока 12; б) сигнал на выходе второго блока 12; в) сигнал на выходе третьего блока 12; д) сигнал на выходе блока 15.
Для сравнения на фиг. 2 г приведена диаграмма сигнала на выходе блока 15 без использования данного решения .
Применение в устройстве метода автоматической компенсации среднего значения входного сигнала цепи авто
матической коррекции на основе вычис- 25 блоков коммутаторов, сигнальные
ления текущего среднего значения этого сигнала позволяет обеспечить устойчивость системы автоматического вождения самоходного агрегата по возмущениям, а устранение пилообразных изменений сигнала коррекции позволяет улучшить прямолинейность вождения благодаря устранению ложных изменений курса самоходного агрегата.
0
g
0
Формула изобретения
Устройство дпя автоматического вождения самоходных агрегатов, содержащее чувствительный элемент, сумматор, преобразователь сигнала, исполнительный механизм, самоходньй агрегат, аналог самоходного агрегата, сумматор центрирования и вычислитель текущего среднего значения, который включает в себя квантователь, блоки усреднения, блоки сдвига и сумматор усреднения, отличающееся тем, что, с целью улучшения прямолинейности вождения путем устранения ложных изменений курса, вычислитель текущего среднего значения дополнительно снабжен блоками коммутаторов, блоками запоминающих устройств и блоками малых временных сдвигов, причем входы сумматора усреднения соединены с выходами блоков запоминающих устройств, входы которых связаны с выхо
входы которых подключены к выходам блоков текущего усреднения, а управляющие входы блоков коммутаторов связаны с соответствующими выходами квантователя и блоков малых временных сдвигов, выходы которых подключены к управлякнцим входам блоков текзтцёго усреднения.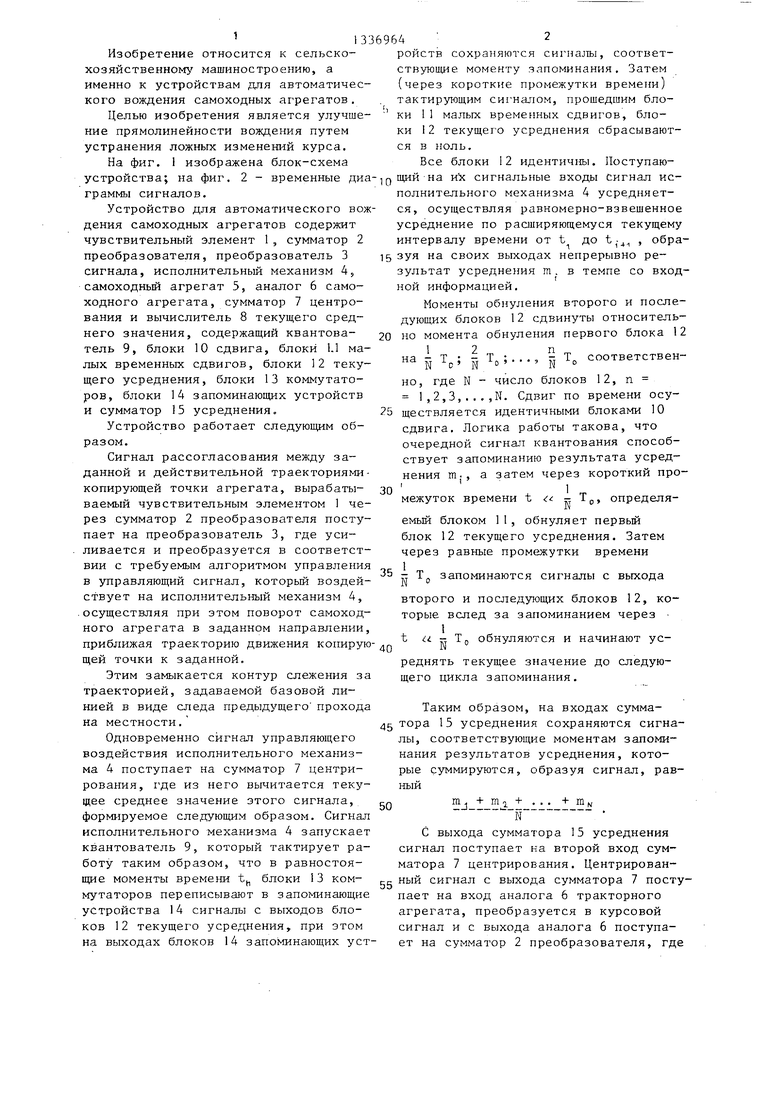
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| Цифровой одноканальный инфранизкочастотный фазометр | 1987 |
|
SU1472831A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| Кодер телевизионного сигнала | 1990 |
|
SU1753596A2 |
| СПОСОБ ФОРМИРОВАНИЯ ЛИНЕАРИЗИРОВАННОГО СИГНАЛА НА ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТЕ. ЛИНЕАРИЗАТОР СИГНАЛА. ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА. СПОСОБ ИНТЕГРИРОВАНИЯ ДЛЯ ФОРМИРОВАНИЯ ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ЦИФРОВОЙ ИНТЕГРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549231C1 |
| КОРРЕЛЯЦИОННОЕ УСТРОЙСТВО | 2002 |
|
RU2229156C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| ДАЛЬНОМЕРНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1990 |
|
RU2028005C1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - улучшение прямолинейности вождения путем устранения ложных изменений курса. Устройство содержит чувствительный элемент 1, сумматор 2 преобразователя, преобразователь 3 сигнала, исполнительный механизм 4, самоходньй агрегат 5, аналог 6 самоходного агрегата, сумматор 7 центрирования и вычислитель 8 текущего среднего значения. Вычислитель 8 среднего текущего значения дополнительно снабжен блоками 13 коммутаторов, блоками 14 запоминающих устройств и блоками малых временных сдвигов, которые позволяют устранить пульсации напряжения на выходе вычислителя текущего среднего значения. Это позволяет устранить ложные изменения курса самоходного агрегата за счет формирования постоянного сигнала, соответствующего значению текущего среднего, а следовательно, и включать дополнительный механизм только в необходимых случаях 2 ил. (Л т Тг i JHHr-i r U ТJj 00 СдЭ Oi со с:) 4
Фиг.г
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
