(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ САМОХОДНЫХ АГРЕГАТОВ
1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения самоходных агрегатов.
Известно устройство для автоматического :вождения1 самоходных агрегатов,. содержащее чувствительный элемент., сумматор, преобразователь сигнала, исполнительный механизм и аналог самоходного агрегатаj l. . .
недостатком этого устройства является .неустойчивость системы авто-г матического -вождения, обусловленная слабой помехозащищенностью от возю мущений в виде несимметрии и пере- . менного характера крюковой нагрузки, склонов, микрорельефа .
Цель изобретения - обеспечение ус тойчивости по возмущениям и повышение качества автоматического вождения в прямолинейном направлении.
Цель достигается тем, что устрой-, ство снабжено подключенными к аналогу самоходного агрегата сумматором центрирования и вычислителем TeKyiqero значения входного сигнала, при этом последний выполнен в виде квантователя, блоков текущего усреднения, блоков сдвига и сумматора усреднения,-причем выход исполнительного механизма
подключен к входу квантователя и к первому входу сумматора центрирования, второй вход которого соединен с выходом сумматора усреднения, а входы последнего связаны с выходами блоков текущего усреднения, первые входы которых соединены с выходом исполнительного механизма, второй вход первого блока текущего ус10реднения связан с выходом квантователя, а вторые входы других блоков текущего усреднения через блоки сдвига-с квантователем.
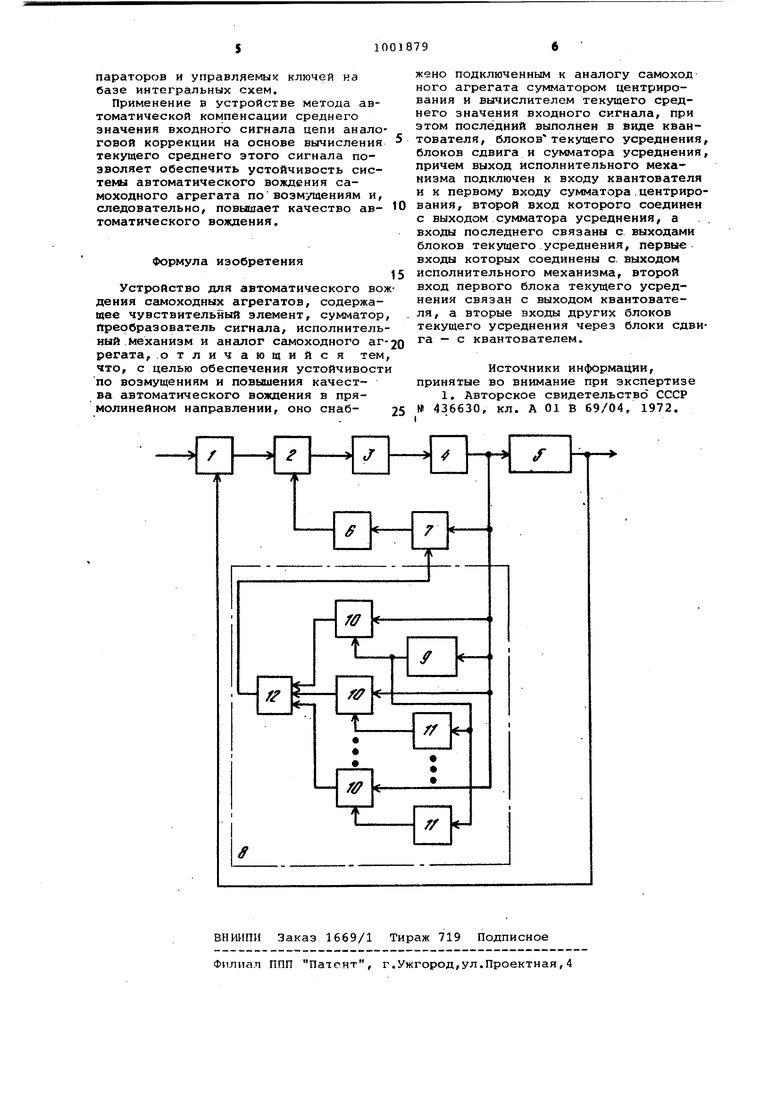
На чертеже приведена блок-схема
15 устройства для автоматического вождения самоходных агрегатов.
Устройство содержит чувствительный элемент 1, сумматор преобразователя 2, преобразователь сигнала 3,
20 исполнительный механизм 4,самоходный агрегат 5, аналог 6 самоходного агрегата, сумматор 7 центрирования и вычислитель текущего среднего значения входного сигнала, имеющий кван25тователь 8, блоки 9 текущего усреднения, блоки 10 сдви1 аГ, сумматор 11 усреднения.
. Устройство для автоматического вождения самоходного агрегата работа30ет следующим образом. Сигнал рассогласования между заданной и действител.-иой траекторией копирующей точки агрегата, вырабаты ваемый чувствительным элементом 1, через сумматор преобразователя 2 по ступает на преобразователь 3, где усиливается и преобразуется в соответствии с требуемым алгоритмом управления в управляющий сигнал, кото рый воздействует на исполнительный механизм 4. Утавляющие воздействия исполнительного механизма 4 обеспечивают поворот самоходного агрега та 5 в заданном направлении, изменя траекторию движения копирующей точки, приближая ее к заданной траекто рии. Таким образом, замыкается контур слежения за заданной траекторией, з даваемой базовой линией в виде след предыдущего прохода на местности Одновременно управляющее воздейс вие исполнительного механизма 4 поступает на сумматор 7 центрирования где из него вычитается текьтдее сред нее jHa4eHHe этого сигнал а,,;формируе мое следующим образом. Сигнал исполнительного механизма 4 запускает кв тгователь 8 (например, квантующий ге ратор) , который тактирует работу бло ков 9 текущего усреднения через их вторые входы так, что в равностоящи моменты времени t блоки 9 сбрасываю ся в ноль. Все блоки 9 идентичны, поступающий на их первые входы сигнал с выхода исполнительного механизма 4 ус- редняется по формуле: oLy,--:t J °() . где : t - текущее время, - - весовая функция, t.,t. - данный и последующий мо менты квантования, причем интервал (период) квантования; -i- о,-),2..., (t)- управляющий сигнал с выхода исполнительного механиз ма 4 . Таким образом, в соответствии с формулой (1) блоки 9 осуществляют равномерно-взвешенное усреднение по расширяющемуся текущему интервалу от t до 1,-.и образуют на своих выходах непрерывно результат усреднения тд(у,в темпе со входной информацией. В момент квантования оценки п, на выхсздах блоков 9 равны нулю, что вносит большую погрешность. Поэтому моменты обнуления (моменты квантования) BTopoi.o и последующих блоков 9 сдви.нуты по времени отнг:1сительно моментов обнуления первого блока 9 . , |то... Тр соответственно, где N - число блоков 9, п 1,2,3... Сдвиг по времени осуществляется блоками сдвигов 10 интервалов квантования по входному сигналу квантования. Логика работы блоков 10 такова, что первый сигнал квантования с выхода первого и остальных блоков 10 на вход второго и остальных блоков 9 поступает через JIJ-TO- Т- от начала работы всего устройства. Затем (блоки 10 обнуляют второй и последую|щий блоки 9 через период .Т. Таким образом, в момент обнуления одного из блоков 9 остальные вычисляют текущее среднее значение, уменьшая погрешность вычислений. Количество блоков текущего усреднения определяется необходимой точностью вычисления оценки по результатам исследований аналоговой модели предлагаемого устройства с достаточной для практики точностью равно трем. Текущие оценки т,с выходов блоков 9 поступают на вход сумматора усреднения, где суммируются по выражению: m m,-t+nbith.. .4- щси оС п С выхода сумматора усреднения 11 сигнал тд поступает на второй вход сумматора 7 центрирования. Центрированный сигнал с выхода сумматора 7 поступает на вход аналога 6 тракторного агрегата, преобразуется в курсовой сигнал, и с выхода аналога .6 поступает на сут 1матор преобразователя 2, где автоматически вычитается из сигнала основной цепи управления и уменьшает этим реакцию всей системы на ошибки слежения что сглаживает искривление траекторий движения и повышает точность вождения по прямой линии. Исполнение отдельных элементов устройства может быть различным. Например, чувствительный элемент 1 может быть выполнен в виде .механического копирующего устройства с измерительным элементом типа сельсин-датчика, либо фотооптического датчика; исполнительный механизм - -в виде в виде электрогидравлического или электропнейматического сервопривода с измерительным элементом выходного сигнала сервопривода (датчиком обратной связи) типа сельсин-датчика, вращающегося трансформатора. В качестве сумматоров 2,7 и 11, преобразователя 3 и аналога 6 могут быть использованы операционные усилители аналоговых интегральных схем с резисторами и конденсаторами в обратной связи. На этой же основе могут быть выполнены блоки 9,10 при использовании совместно с усилителями компараторов и управляемых ключей на базе интегральных схем, Применение в устройстве метода автоматической компенсации среднего значения входного сигнала цепи аналоговой коррекции на основе вычисления текущего среднего этого сигнала позволяет обеспечить устойчивость системы автоматического вождения самоходного агрегата по возмущениям и, следовательно, повышает качество автоматического вождения. Формула изобретения Устройство для автоматического вож дения самоходных агрегатов, содержащее чувствительный элемент, сумматор Преобразователь сигнала, исполнительный Механизм и аналог самоходного агрегата, отличающийся тем что, с целью обеспечения устойчивости по возмущениям и повышения качества автоматического вождения в прямолинейном направлении, оно снабжено подключенным к аналогу самоход него агрегата сумматором центрирования и вычислителем текущего среднего значения входного сигнала, при этом последний выполнен в виде квантователя, блоков текущего усреднения, блоков сдвига и сумматора усреднения, причем выход исполнительного механизма подключен к входу квантователя и к первому входу сумматора.центрирования, второй вход которого соединен с выходом сумматора усреднения, а входы последнего связаны с выходами блоков текущего.усреднения, первые входы которых соединены с. выходом исполнительного механизма, второй вход первого блока текущего усреднения связан с выходом квантователя, а вторые входы других блоков текущего усреднения через блоки сдвига-с квантователем. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 436630, кл. А 01 В 69/04, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходных агрегатов | 1985 |
|
SU1336964A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Устройство автоматического вождения самоходных агрегатов | 1986 |
|
SU1367883A1 |
| Устройство для стабилизации средней частоты шумовых выбросов над пороговым уровнем | 1980 |
|
SU902269A1 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Устройство для вычисления текущего значения функции правдоподобия авторегрессионной случайной последовательности | 1980 |
|
SU907554A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для автоматического вождения мобильных агрегатов | 1984 |
|
SU1166690A1 |
| Адаптивный дискретный согласован-Ный фильТР | 1979 |
|
SU813699A1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
