Изобретение относится к автоматизации технологическшс процессов в камнеобрабатывающей промьшшенности и может быть использовано для управления распиловкой природного камня на штрипсовых станках с горизонтальным движением пильной рамы.
Цель изобретения - повышение точности управления.
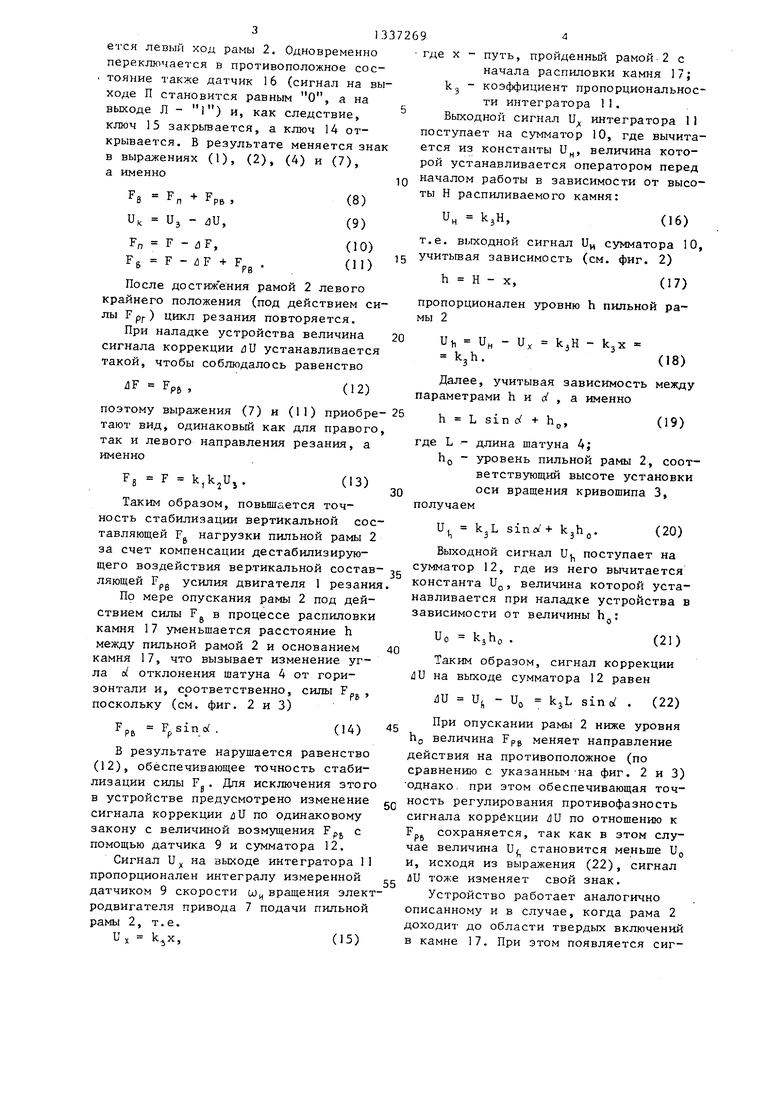
На фиг.1 приведена схема устройства; на фиг. 2 и 3 - силы, действую- щие на пильную раму.
Устройство для управления камне- распшговочным станком содержит двигатель 1 резания (главньй), кинематически связанньй с пильной рамой 2 посредством кривопшпа 3 с.шатуном 4, датчик 5 нагрузки электродвигателя резания, регулятор 6 и электропривод 7 рабочей подачи пильной рамы 2, задатчик 8, датчик скорости привода подачи, сумматор 10, интегратор 11, сумматоры 12 и 13, ключи 14 и 15 и датчик 16 направления резания камня 1 7 .
Датчик 5 нагрузки, обусловленной противодействием распиливаемого камня 17 резанию, выполнен на основе трансформатора тока, потребляемого двигателем 1 резания. Датчик 5 может быть реализован также на базе тензо- сопротивлений, установленных на раме 2.
Регулятор 6 и задатчик 8 - приборы серии АКЭСР.
Регулируемый привод 7 - тиристор- ный преобразователь типа БТУ с электродвигателем постоянного тока.
Датчик 9 скорости привода подачи вьтолнен в виде тахогенератора ТМГзоп.
Датчик 16 служит для идентификации направления горизонтального возвратно-поступательного движения пильной рамы 2 и имеет два выхода Л и П соответственно для левого и правого хода рамы 2, Поскольку каждому обороту кривошипа 3 соответствует двойной ход рамы 2, то датчик 16 может быть выполнен в виде двух промьшленных бесконтактных выключателей типа КВП- 16, установленных в диаметрально про тивоположньпс точках плоскости вращения кривошипа 3, и подключенного к их выходам триггера.
Устройство работает следующим образом.
В момент начала правого хода рамы 2 сила Fg, действующая на раму 2 в вертикальном направлении, становится равной (см. фиг. 2)
6 - п Р6
(I)
где F| - усилие, обеспечиваемое приводом 7 подачи пильной ра- мы 2,Fpg - вертикальная составляющая
усилия FP , передаваемого на раму 2 от двигателя 1 резания.
Одновременно происходит переключение датчика 16 направления резания (см. фиг. 1): на выходе П появляется логический сигнал 1, а на выходе Л- сигнал О. Выходные сигналы датчи- ка 16 меняют состояние ключей 14 и 15: ключ 14 закрывается, а ключ 15 открывается. В результате сигнал коррекции задания 4U от сумматора 12 проходит через ключ 15 на вход сумматора 13, где складывается с сигналом задания Uj, поступающим от задатчика 8, и выходной сигнал U сумматора 13 становится равным
UK Uj + dU .
(2)
Сигнал U| проходит через регулятор 6 на регулируемый привод 7, который преобразует его в усилие подачи F , причем
F .U,,(3)
где k,kj - коэффициенты передачи соответственно регулятора 6 и привода 7, и с учетом выражения (2)
F + ЛР,
при этом
F ,,
(4)
(5) (6)
dF . В результате, учитывая выражение (1), вертикальная сила Fg, от велич.и- ны которой зависит производитель- ность распиловки, имеет вид
F + JF - F
Рб
(7)
Под действием горизонтальной составляющей Fpr силы FP рама 2 начинает двигаться вправо, осуществляя резание камня 17, и достигает правого крайнего положения. При этом (фиг.З) сила FP меняет направление своего действия на противоположное, начинается левый ход рамы 2. Одновременно переклэочается в противоположное состояние также датчик 16 (сигнал на выходе П становится равным О, а на выходе Л - 1) и, как следствие, ключ 15 закрьгоается, а ключ 14 открывается. В результате меняется знак в выражениях (1), (2), (4) и (7), а именно
F + F л Рб 5
Uj - 4U,
F - dF,
F - 4 F + F„
(8) (9) (10) (11)
PB
е достижения рамой 2 левого
крайнего положения (под действием силы Fpp) цикл резания повторяется.
При наладке устройства величина сигнала коррекции ли устанавливается такой, чтобы соблюдалось равенство
JF
РВ
(12)
поэтому выражения (7) и (11) приобре- 25 тают вид, одинаковый как для правого, так и левого направления резания, а именно
F k,k2Uj.
(13)
Таким образом, повышается точность стабилизации вертикальной составляющей F., нагрузки пильной рамы 2
D
за счет компенсации дестабилизирующего воздействия вертикальной состав- ляющей Fpg усилия двигателя 1 резания
По мере опускания рамы 2 под действием силы F в процессе распиловки
о
камня 17 уменьшается расстояние h между пильной рамой 2 и основанием камня 17, что вызывает изменение угла о отклонения шатуна 4 от горизонтали и, соответственно, силы Fp, поскольку (см. фиг. 2 и 3)
FPB Fpsin.
(14)
В результате нарушается равенство (12), обеспечивающее точность стабилизации силы F . Дпя исключения зтого в устройстве предусмотрено изменение сигнала коррекции jU по одинаковому закону с величиной возмущения Fp с помощью датчика 9 и сумматора 12.
Сигнал Uj( на выходе интегратора 11 пропорционален интегралу измеренной датчиком 9 скорости Ыц вращения электродвигателя привода 7 подачи пильной рамы 2, т.е.
и
kjX,
(15)
где X - путь, пройденный рамой-2 с начала распиловки камня 17;
kj - коэффициент пропорциональности интегратора 11.
Выходной сигнал U интегратора 11 поступает на сумматор 10, где вычитается из константы U, величина которой устанавливается оператором перед началом работы в зависимости от высоты Н распиливаемого камня:
UH kjH,
(16)
15
т.е. выходной сигнал и„ сумматора 10, учитывая зависимость (см. фиг. 2)
Н - X,
(17)
пропорционален уровню h пильной рамы 2
и и, - и, kjH - kjh.
(18)
Далее, учитывая зависимость между параметрами h и о , а именно
h L sin 0 + h ,
(19)
где L - длина шатуна 4;
hjj - уровень пильной рамы 2, соответствующий высоте установки оси вращения кривошипа 3,
получаем
и,
sino/ + kjhg.
(20)
Выходной сигнал U поступает на сумматор 12, где из него вычитается константа U, величина которой устанавливается при наладке устройства в
зависимости от величины Uo kjh, .
(21)
Таким образом, сигнал коррекции dU на выходе сумматора 12 равен
ли и - Uo kjL sino . (22)
При опускании рамы 2 ниже уровня hj, величина Fpg меняет направление действия на противоположное (по сравнению с указанным-на фиг. 2 и 3) однако, при этом обеспечивающая точность регулирования противофазность сигнала коррекции 4U по отношению к
F.. сохраняется, так как в этом слурб
чае величина U становится меньше и и, исходя из выражения (22), сигнал ли тоже изменяет свой знак.
Устройство работает аналогично описанному и в случае, когда рама 2 доходит до области твердых включений в камне 17. При этом появляется сигнал на выходе датчика 5 нагрузки, который поступает на вход регулятора 6 и уменьшает величину сигнала поступающего на регулятор 6 от сумматора 13, соответственно, уменьшаются параметры Uj и F в выражениях (2), (9) и (13). В результате снижается скорость опускания пильной рамы 2, что предохраняет пклы от увода и обеспечивает заданное качество продукции.
Для случая использования устройства в штрипсовом камнераспиловочном станке модели 1925 (Н 2 м, h 1 м, L 5 м) максимальное повышение точности составляет 5%.
Формула изобретения
Устройство для управления камне- распиловочным станком, содержащее датчик нагрузки электродвигателя резания, задатчик, интегратор и регуля
372696
тор привода подачи, отличающееся тем, что, с целью повышения точности управления, Б него вве- даны датчик направления резания,датчик скорости привода подачи, три сумматора и два ключа, причем датчик скорости подачи через интегратор подключен к входу первого сумматора, ход которого соединен с входом второ-, го сумматора, выход которого соединен с первыми входами первого и второго ключей, вторые входы которых соединены с соответствующими выходами
g датчика направления резания, выходы первого и второго ключей соединены соответственно с первым и вторым входами третьего сумматора, третий вход которого соединен с задатчиком, вы2Q ход третьего сумматора соединен с первым входом регулятора привода подачи, а второй вход которого соединен с датчиком нагрузки электродвигателя резания.
фиг.2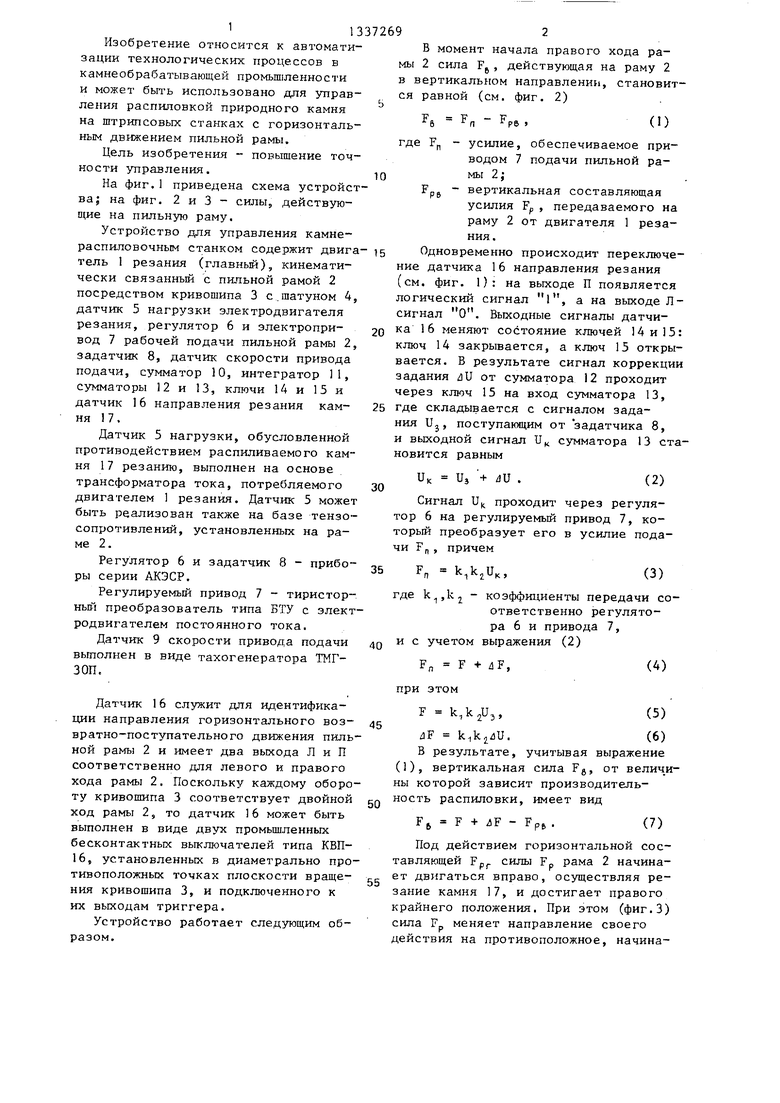
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления распиловочным станком | 1985 |
|
SU1273254A1 |
| Способ управления подачей абразива при штрипсовой распиловке камня | 1987 |
|
SU1431937A1 |
| Станок для распиловки камня | 1990 |
|
SU1735024A1 |
| Станок для распиловки камня | 1980 |
|
SU895684A1 |
| Устройство для адаптивного управления шлифовальным станком | 1987 |
|
SU1414594A1 |
| Устройство автоматического управления процессом промывки пульпы | 1983 |
|
SU1169828A1 |
| Способ пуска электродвигателя цилиндрической конструкции на радиальных упругих опорах | 1986 |
|
SU1337979A1 |
| СТАНОК ДЛЯ РАСПИЛОВКИ КАМНЯ | 1973 |
|
SU400486A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Способ разделки блоков природного камня | 2019 |
|
RU2699096C1 |
Изобретение относится к области автоматизации технологических процессов в камнеобрабатывающей промьшшен- ности. Может быть использовано для управления распиловкой природного камня на штрипсовых станках с горизонтальным движением пильной рамы. Позволяет повысить точность управления. Содержит двигатель 1 резания, кинематически связанный с пильной рамой 2 посредством кривошипа 3 с шатуном 4, датчик 5 нагрузки электродвигателя резания, регулятор 6, электропривод 7 рабочей подачи пильной рамы 2, задатчик 8, датчик 9 скорости привода подачи, сумматор 10, интегратор 11, сумматоры 12 и 13, ключи 14 и 15, датчик 16 направления резания камня 17. 3 ил. с S (Л со со ю о 
(ригЗ
Составитель А.Кузнецов Редактор Л.Веселовская Техред И.Попович
Заказ 4085/16Тираж 524Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Зимокосов
| Устройство для управления распиловочным станком | 1978 |
|
SU686883A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Устройство для управления распиловочным станком | 1985 |
|
SU1273254A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
