Изобрете ние относится к электротехнике, а именно к управлению электродвигателем на упруго-податливых опорах, и может быть использовано в приводе центрифуг, кинетических аккумуляторов и других устройств с быстровращающимся ротором при их разгоне .
Цель изобретения - повышение надежности пуска за счет снижения амплитуды радиал1зНых колебаний ротора в резонансной области.
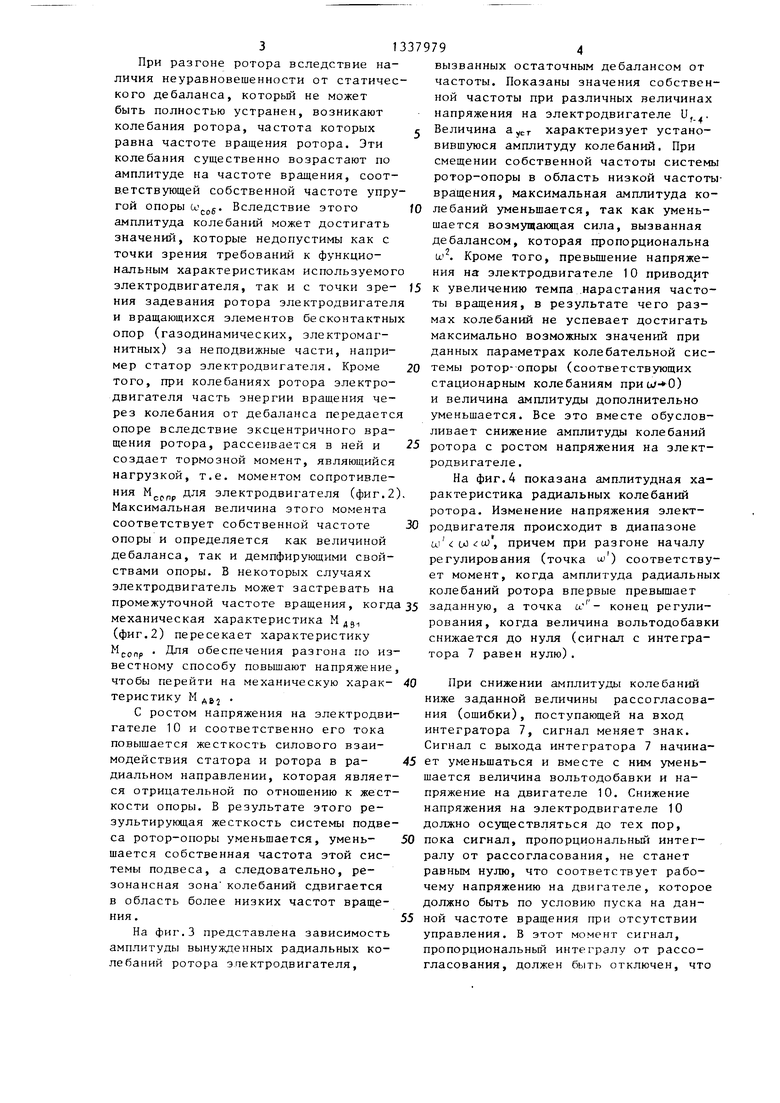
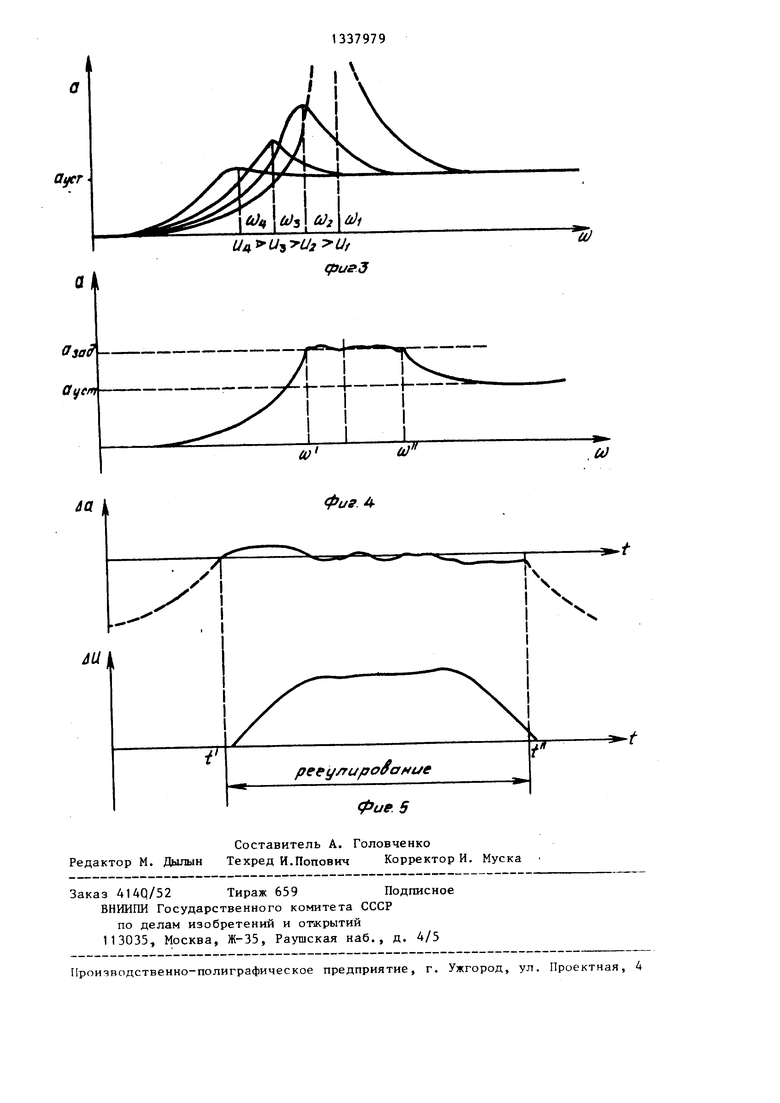
На фиг.1 представлена блок-схема устройства, реализующего способ пуска, на фиг.2 - характеристики изменения момента электродвигателя и момента сопротивления, создаваемого например, упругой активной магнитной опорой в функции частоты вращения, на фиг.3-5 - графики, поясняющие характер процесса пуска.
Устройство для пуска электродвигателя содержит датчик 1 амплитуды колебаний ротора, соединенный с вычитающим блоком 2 (сумматор с обратным знаком), с которым также соединен задатчик 3 амплитуды. Вычитающий блок 2 соединен с логическим блоком 4 типа триггер и управляемым ключом 5. Логический блок 4 своим выходом соединен с управляющим входом 6 ключа 5. Ключ 5 своим выходом соединен с входом интегратора 7, который выходом подключен к сумматору 8 (если необходимо через усилитель). Сумма- тор 8 подключен к входу регулятора 9 напряжений, подключенного к электродвигателю 10 через управляемый источник 11 питания. Схема подключения регулятора, источника питания и электродвигателя может быть разнообразной. Если напряжение на электродвигателе должно регулироваться в функции, например, частоты вращения LO и тока i, то необходима обратная связь по указанным параметрам, соединяющая электродвигатель 10 и сумматор 8, Устройство должно быть снабжено логическим блоком 12, соединенным своим входом с выходом интегратора 7, а выходом - с другим управляющим входом 13 ключа 5 и с входом логического блока 4.
При необходимости обеспечить требуемое динамическое качество регулирования между интегратором 7 и сумматором 8 может быть включен блок 1 коррекции.
5
0
Способ пуска электродвигателя осуществляется следующим образом.
После подключения электродвигателя 1 О к источнику питания в процессе его пуска контролируют амплитуду радиальных колебаний ротора с помощью датчика 1, в качестве которого может быть использован датчик радиальных перемещений, имеющийся в контуре управления активной опорой электромагнитного или магнитоэлектрического типа. Определяют величину рассогласования, т.е. разность между сигналом, пропорциональным измеренной величине амплитуды радиальных колебаний л, и заданным значением этого сигнала з. , поступающего с задат- чика 3 амплитуды. Эту операцию осуществляют в вычитакщем блоке 2. Превышение амплитудой колебаний заданного значения (изменение знака рассогласования) фиксируют с помощью логического блока 4 и управляемого клю5 ча 5. После этого изменение напряжения dU источника питания осуществляют по закону 4U j(a-a,„д)dt, Для этого сигнал рассогласования йа интегрируют во времени посредством
0 интегратора 7, который подключается к выходу вычитающего блока 2 ключом 5 при превышении амплитуды радиальных колебаний заданного значения. При этом логический блок 4 блокируется и не реагирует на изменение знака рассогласования до поступления на него сигнала с логического блока 12, возвращающего блока 4 в исходное состояние. Напряжение на электродвигателе 10 изменяют следующим образом: увеличивают его при превьш1ении амплитудой заданного значения и уменьшают напряжение при снижении амплитуды ниже заданного значения. Для этого сигнал с выхода интегратора 7 подают через сумматор 8 на регулятор 9 напряжения источника питания электродвигателя 10 в виде временной вольтодобавки. Когда напряжение на электродвигателе 10 достигнет номинального значения, т.е. сигнал на выходе интегратора 7 станет равным нулю, прекращают изменение напряжения в функции амплитуды колебаний ротора и логический блок 4 посредством логического блока 12 возвращают в исходное состояние.
Сущность происходящих явлений припуске электродвигателя состоит в следующем.
5
0
5
0
5
При разгоне ротора вследствие наличия неуравновешенности от статического дебаланса, который не может быть полностью устранен, возникают колебания ротора, частота которых равна частоте вращения ротора. Эти колебания существенно возрастают по амплитуде на частоте вращения, соот- в.етствующей собственной частоте упругой опоры Вследствие этого амплитуда колебаний может достигать значений, которые недопустимы как с точки зрения требований к функциональным характеристикам используемог злектродвигателя, так и с точки зре- ния задевания ротора электродвигател и вращающихся элементов бесконтактны опор (газодинамических, электромагнитных) за неподвижные части, например статор электродвигателя. Кроме того, при колебаниях ротора электродвигателя часть энергии вращения через колебания от дебаланса передаетс опоре вследствие эксцентричного вращения ротора, рассеивается в ней и создает тормозной момент, являющийся нагрузкой, т.е. моментом сопротивления для электродвигателя (фиг.2 Максимальная величина этого момента соответствует собственной частоте опоры и определяется как величиной дебаланса, так и демпфирующими свойствами опоры. В некоторых случаях электродвигатель может застревать на промежуточной частоте вращения, когда механическая характеристика Мдд (фиг.2) пересекает характеристику сопр Д обеспечения разгона по известному способу повышают напряжение чтобы перейти на механическую харак- теристику М да
С ростом напряжения на электродвигателе 10 и соответственно его тока повышается жесткость силового взаимодействия статора и ротора в ра- диальном направлении, которая является отрицательной по отношению к жесткости опоры. В результате этого результирующая жесткость системы подвеса ротор-опоры уменьшается, умень- шается собственная частота этой системы подвеса, а следовательно, резонансная зона колебаний сдвигается в область более низких частот вращения .
На фиг.З представлена зависимость амплитуды вынужденных радиальных колебаний ротора электродвигателя.
вызванных остаточным дебалансом от частоты. Показаны значения собственной частоты при различных величинах напряжения на электродвигателе U,. Величина а уст характеризует установившуюся амплитуду колебаний. При смещении собственной частоты системы ротор-опоры в область низкой частоты вращения, максимальная амплитуда колебаний уменьшается, так как уменьшается возмущакнцая сила, вызванная дебалансом, которая пропорциональна ш. Кроме того, превышение напряжения на электродвигателе 10 приводит к увеличению темпа .нарастания частоты вращения, в результате чего размах колебаний не успевает достигать максимально возможных значений при данных параметрах колебательной системы ротор- опоры (соответствующих стационарным колебаниям прии/- 0) и величина амплитуды дополнительно уменьшается. Все это вместе обусловливает снижение амплитуды колебаний ротора с ростом напряжения на электродвигателе.
На фиг.4 показана амплитудная характеристика радиальных колебаний ротора. Изменение напряжения электродвигателя происходит в диапазоне ), причем при разгоне началу регулирования (точка uj ) соответствует момент, когда амплитуда радиальны колебаний ротора впервые превышает заданную, а точка а - конец регулирования, когда величина вольтодобавк снижается до нуля (сигнал с интегратора 7 равен нулю).
При снижении амплитуды колебаний ниже заданной величины рассогласования (ошибки), поступающей на вход интегратора 7, сигнал меняет знак. Сигнал с выхода интегратора 7 начинает уменьшаться и вместе с ним уменьшается величина вольтодобавки и напряжение на двигателе 10. Снижение напряжения на электродвигателе 10 должно осуществляться до тех пор, пока сигнал, пропорциональный интегралу от рассогласования, не станет равным нулю, что соответствует рабочему напряжению на двигателе, которое должно быть по условию пуска на данной частоте вращения гфи отсутствии управления. В этот момент сигнал, пропорциональный интегралу от рассогласования, должен быть отключен, что
1337979
приводит к прекращению изменения напряжения на электродвигателе 10.
На фиг.4 показаны качественные зависимости рассогласования ла к воль- тодобавки ли от времени в процессе пуска электродвигателя при регулировании напряжения электродвигателя по данному способу.
После прекращения изменения напря- Q pax, предотвращая возможность задежения система управления должна быть приведена в исходное состояние, чтобы при повторном пуске она могла реагировать на изменение знака рассогласования. Логический блок 12 при снижении величины вольтодобавки ниже нуля отключает выход вычитающего блока 2 посредством ключа 5 от входа интегратора 7 и одновременно возвращает логический блок 4 в исходное состояние . Далее пуск продолжается по естественной механической характеристике. При регулировании напряжения происходит переход с одной механической характеристики на другую. Электродвигатель при этом может быть различного типа: асинхронный постоянного тока с коллектором и бесконтактный синхронный со специальными пусковыми устройствами, например с беличьей клеткой на роторе. Данный способ может быть использован и при частотном разгоне электродвигателя. В этом случае можно воздер|ствовать не только на напряжение, но и на темп изменения частоты путем управления регулятором частоты.
Указанные выше операции изменения напряжения на электродвигателе можно использовать и при торможении проти- вовключением или частотным способом, так как при уменьшении частоты вращения в резонансной области могут возникнуть колебания ротора повьппенной амплитуды. В этом случае также необходимо зафиксировать момент, когда амплитуда колебаний будет превышать заданное значение, затем регулировать напряжение по сигналу, пропорциональному интегралу по времени от рассогласования амплитуды колебаний ротор от заданного значения. В этом случае началу регулирования соответствует
6
точка
а - концу (фиг.4), а гулирования.
Таким образом, предлагаемый способ позволяет снизить амплитуду радиальных колебаний ротора электродвигателя при пуске (торможении) до уровня заданной величины и тем самым повысить надежность двигателя на упругих опования вращающихся частей за неподвижные. Кроме того, уменьшается потребляемая при разгоне энергия, так как подача повышенного напряжения осу- ществляется только на период прохождения резонансной области, а не на весь период пуска (торможения) и одновременно с амплитудой радиальных колебаний происходит снижение величи0 ны тормозного момента М
5
0
5
0
5
сопр
создаваемого упругими опорами. Формула изобретения
Способ пуска электродвигателя цилиндрической конструкции на радиальных упругих опорах, при котором подключают электродвигатель к Источнику питания и, изменяя напряжение источника питания, разгоняют электродвигатель до номинальной частоты вращения, отличающийся тем, что, с целью повышения надежности пуска за счет снижения амплитуды радиальных колебаний ротора электродвигателя в резонансной области, после подключения электродвигателя к источнику питания контролируют амплитуду радиальных колебаний ротора, сравнивают ее с заданным значением и при превышении измеренной амплитуды радиаль- ных колебаний заданного значения указанное изменение напряжения источника питания осуществляют до номинального значения по закону
/IU
-(.а
зад
) dt.
0
а 1ЧА
где а - амплитуда радиальных колебаний ротора электродвигателя; заданное значение амплитуды радиальных колебаний ротора электродвигателя, ли - величина изменения напряжения источника питания.
М
MdS
a)
eticff
фи9.2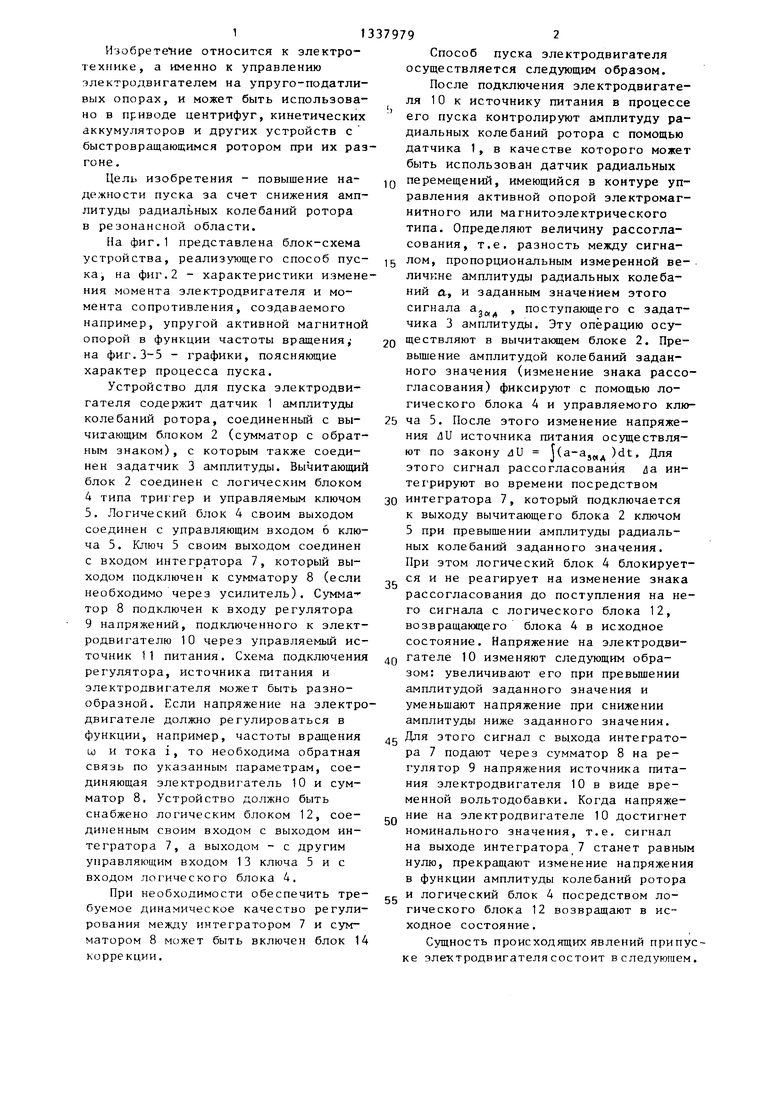
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления радиальными магнитными опорами ротора | 1988 |
|
SU1613724A1 |
| Способ управления магнитными опорами ротора | 1989 |
|
SU1712691A1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Способ пуска гистерезисного электродвигателя | 1980 |
|
SU997214A1 |
| Способ пуска группы синхронных гистерезисных электродвигателей | 1986 |
|
SU1387151A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| СПОСОБ УМЕНЬШЕНИЯ РЕЗОНАНСНЫХ АМПЛИТУД ПРИ ПЕРЕХОДНЫХ ПРОЦЕССАХ В ВИБРАЦИОННЫХ МАШИНАХ | 2020 |
|
RU2758344C1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
Изобретение относится к электротехнике и может быть использовано в приводе центрифуг, кинетических аккумуляторов и других устройств с быстровращающимся ротором. Целью изобретения является повышение надежности пуска за счет снижения амплитуды колебания ротора в резонансной области. Указанная цель достигается тем, что в способе пуска электродвигателя цилиндрической конструкции на радиальных упругих опорах после включения двигателя в процессе разгона измеряют амплитуду радиальных колебаний ротора, сравнивают ее с заданным значением и при превышении измеренной амплитуды радиальных колебаний заданного значения изменяют напряжение питания электродвигателя до номинального значения по закону ли (а - а )dt, где а - амплитуды радиальных колебаний ротора, заданное значение указанной амплитуды. Это предотвращает задевание вращающихся частей электродвигателя за неподвижные и снижает потребление электроэнергии, т.к. подача повышенного напряжения осуществляется только на период прохождения резонансной области. 5 ил. (Л со со ;о со
| Способ пуска синхронного редукторного электродвигателя | 1973 |
|
SU534016A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вышков Ю.Д., Иванов В.И | |||
| Магнитные опоры в автоматике.- И.: Энергия, 1978, с.120. | |||
