Изобретение относится к балансировочной технике и может быть использовано при разработке измерительных устройств к балансировочным станкам.
Целью изобретения является повышение точности за счет уменьшения систематических и случайных погрешностей определения параметров дисбаланса.
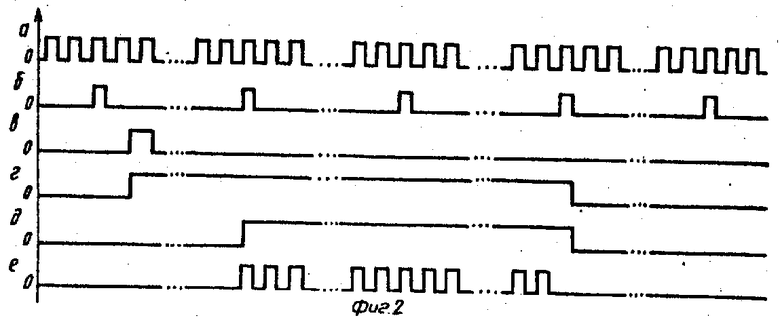
На фиг. 1 изображена структурная схема измерительного устройства балансировочного станка; на фиг. 2 - диаграммы, поясняющие его работу.
Устройство содержит балансируемый ротор 1 с нанесенными равномерно по его окружности метками 2 и меткой 3 угла, первый и второй датчики 4 и 5 опорного сигнала, оптически связанные соответственно с метками 2 и меткой 3 угла, последовательно соединенные вибропреобразователь 6, масштабирующий усилитель 7 и блок 8 определения угла дисбаланса, выполненный в виде связанных аналого-цифрового преобразователя 9 и микропроцессора 10, резистивную матрицу 11, связанную с микропроцессором 10 и включенную в цепь обратной связи масштабирующего усилителя 7, триггер 12, счетчик 13 с регулируемым коэффициентом счета, счетный вход которого соединен с выходом второго датчика 5 опорного сигнала и S-входом триггера 12, и логический элемент 3И 14, три входа которого соединены соответственно с выходом первого датчика 4 опорного сигнала, с соединенными между собой выходом счетчика 13 с регулируемым коэффициентом счета и R-входом триггера 12 и с выходом триггера 12, а выход связан со входом аналого-цифрового преобразователя 9.
Устройство работает следующим образом.
Вращают ротор 1 на рабочей частоте, с помощью вибропреобразователя 6 преобразуют колебания ротора 1 в сигнал дисбаланса и подают его на вход мастабирующего усилителя 7. Устанавливают коэффициент передачи масштабирующего усилителя 7 с помощью поступающего на резистивную матрицу 11 из микропроцессора 10 кода масштаба таким образом, чтобы лимитировался сигнал, соответствующий полной шкале аналого-цифрового преобразователя 9. С выхода масштабирующего усилителя 7 сигнал дисбаланса поступает на первый вход аналого-цифрового преобразователя 9, а на его второй вход с выхода логического элемента 3И 14 приходят запускающие импульсы, которые определяют моменты отсчетов сигнала дисбаланса.
Запускающие импульсы формируются следующим образом. С помощью датчика 4 опорного сигнала вырабатывается последовательность импульсов от меток 2, которую подают на первый вход логического элемента 14 3И (фиг. 2, а). С помощью датчика 5 опорного сигнала вырабатывают один импульс за оборот ротора 1 от метки 3 угла (этот импульс является началом отсчета углового положения дисбаланса) и подают его на счетный вход счетчика 13 с регулируемым коэффициентом счета и S-вход триггера 12 (фиг. 2, б). Для исключения случайных погрешностей при определении дисбаланса оценку его параметров производят не за один, а за несколько оборотов ротора 1, необходимое число которых устанавливают с помощью регулируемого коэффициента пересчета счетчика 13. После запуска счетчика 13 по шине (фиг. 2, в) сигнал на его выходе разрешает установку триггера 12 (фиг. 2, г) и одновременно подготавливает прохождение импульсов от меток 2 через логический элемент 3И 14. В момент поступления очередного импульса от метки 3 угла через датчик 5 опорного сигнала устанавливается триггер 12 (фиг. 2, д), разрешая прохождение через логический элемент 3И 14 на второй вход аналого-цифрового преобразователя 9 запускающих импульсов от меток 2 (фиг. 2, е). По прошествии заданного количества оборотов ротора 1 счетчик 13 и триггер 12 устанавливаются в исходное положение, запрещая прохождение запускающих импульсов через логический элемент 3И 14.
После каждого отсчета сигнала дисбаланса его кодовый эквивалент по сигналу готовности поступает с выхода аналого-цифрового преобразователя 9 в микропроцессор 11, где по известному алгоритму его анализируют и определяют параметры дисбаланса.
Для реализации этого алгоритма необходимы два опорных гармонических сигнала с частотой вращения ротора, сдвинутые между собой на 90о. Первый опорный сигнал формируют пропорционально значению sin , а второй опорный сигнал - пропорционально значению cos
, а второй опорный сигнал - пропорционально значению cos , где N - число меток 2 на роторе 1; n - порядковый номер метки 2 относительно метки 3 угла. Шаг дискретизации круговой координаты метки 3 угла
, где N - число меток 2 на роторе 1; n - порядковый номер метки 2 относительно метки 3 угла. Шаг дискретизации круговой координаты метки 3 угла  определяется числом меток N, а конкретная дискретная круговая координата - умножением шага на порядковый номер метки n-
определяется числом меток N, а конкретная дискретная круговая координата - умножением шага на порядковый номер метки n- .
.
Кодовые значения синусоидальной и косинусоидальной функций для указанных углов предварительно определяют и хранят в памяти микропроцессора 10. В нем же формируют закодированный массив информации о сигнале дисбаланса и коэффициентах усиления масштабирующего усилителя 7, причем порядок следования как элементов массива, так и опорных сигналов жестко связан с порядком следования меток 2 ротора 1. После анализа данные о параметрах дисбаланса или требуемых корректирующих массах выдаются на дисплей. Таким образом, обработка сигнала непрерывного сигнала дисбаланса с целью определения параметров дисбаланса сводится к обработке чисел (кодовых групп), отображающих дискретные уровни сигнала дисбаланса в моменты отсчета, определяемые метками 2 на роторе 1.
Преимущества устройства заключаются в повышении точности балансировки за счет уменьшения систематических и случайных погрешностей определения параметров дисбаланса. Уменьшение систематических погрешностей достигается за счет цифровой обработки сигнала дисбаланса по структурной схеме, в которой фазовые соотношения в опорном и измерительном каналах не зависят от частоты вращения ротора 1, температуры окружающей среды и устройства и т. п. , за счет приведения определяемых параметров к заданной размерности с помощью автоматического регулирования коэффициента передачи масштабирующего усилителя 7 (лимитируется сигнал дисбаланса, соответствующий полной шкале аналого-цифрового преобразователя 9) и за счет уменьшения влияния случайных выбросов сигнала дисбаланса путем проведения многократных наблюдений и автоматического усреднения результатов наблюдений.
Важным достоинством устройства по сравнению с прототипом является также возможность применения кодирования для повышения помехоустойчивости, удобства обработки сигналов дисбалансов и сопряжения измерительных устройств балансировочных станков с цифровыми вычислительными машинами.
(56) Авторское свидетельство СССР N 222710, кл. G 01 M 1/22, 1965.
Авторское свидетельство СССР N 996884, кл. G 01 M 1/22, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1988 |
|
RU1584539C |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ И ФАЗЫ ДИСБАЛАНСА | 1992 |
|
RU2057308C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство измерения параметров дисбаланса | 1990 |
|
SU1795318A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ И ФАЗЫ ДИСБАЛАНСА | 1992 |
|
RU2045005C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Способ определения параметров вектора дисбаланса роторов и устройство для его осуществления | 1986 |
|
SU1392414A1 |
| Устройство для динамической балансировки роторов | 1984 |
|
SU1173214A1 |
| Автоматический балансировочный станок | 1985 |
|
SU1226089A1 |
| Балансировочный станок с цифровым измерением угла дисбаланса | 1985 |
|
SU1295239A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение точности за счет уменьшения систематических и случайных погрешностей при измерении. Коэффициент передачи масштабирующего усилителя 7 изменяется с помощью микропроцессора 10 и резистивной матрицы 11 таким образом, чтобы сигнал дисбаланса соответствовал полной шкале аналого-цифрового преобразователя 9, на вход которого приходят сигналы с логического элемента 14 ЗИ, связанного с датчиками 4 и 5 опорного сигнала. 2 ил.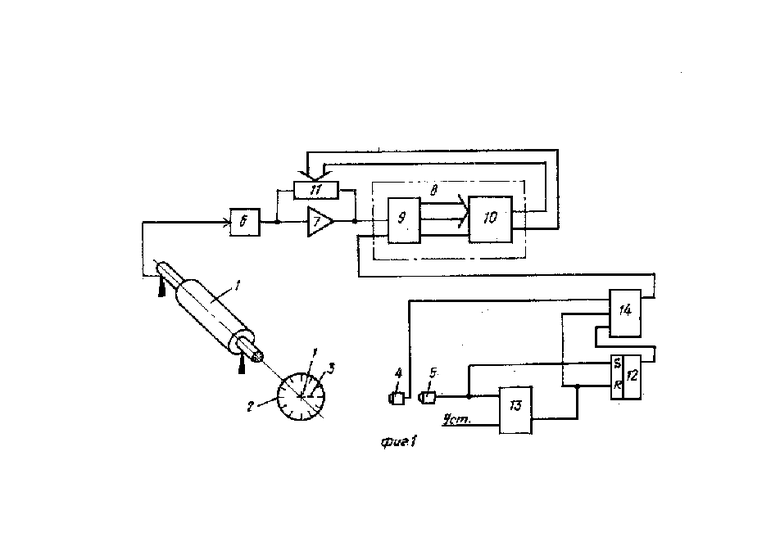
ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО БАЛАНСИРОВОЧНОГО СТАНКА, содержащее два датчика опорного сигнала, предназначенные для оптического взаимодействия с метками, нанесенными на балансируемый ротор, и последовательно соединенные вибропреобразователь, масштабирующий усилитель и блок определения угла дисбаланса, отличающееся тем, что, с целью повышения точности за счет учета систематических и случайных погрешностей, оно снабжено резистивной матрицей, включенной в цепь обратной связи масштабирующего усилителя, триггером, счетчиком с регулируемым коэффициентом счета, счетный вход которого соединен с выходом второго датчика опорного сигнала и S-входом триггера, логическим элементом 3И, первый вход которого соединен с выходом первого датчика опорного сигнала, второй - с соединенными между собой выходом счетчика с регулируемым коэффициентом счета и R-входом триггера и третий - с выходом триггера, а выход соединен со вторым входом блока определения угла дисбаланса, выполненного в виде последовательно соединенных аналого-цифрового преобразователя и микропроцессора, связанного с резистивной матрицей, метки нанесены равномерно по окружности на наружной поверхности ротора и предназначены для взаимодействия с первым датчиком опорного сигнала, а одна метка, выполненная удлиненной, представляет собой метку угла и предназначена для взаимодействия со вторым датчиком опорного сигнала.
