4 4
что фиксируется с помощью нуль-орга- ня 13, чатем к полученному числу меток прибавляют N/4 меток с помощью счетчика меток и получают число Nn, соответствующее фазе дисбаланса, которая определяется как (
и индицируется с помо1чью индикатора 18 угла дисбаланса. Амплитуда дисбаланса фиксируется в момент отсчета Na метки и индицируется на индикаторе 19 величины дисбаланса, 2 с,п. и I 3.п, ф-лы, 4 ил,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Способ определения дисбаланса роторов и устройство для его осуществления | 1988 |
|
SU1552023A1 |
| Устройство для определения вектора дисбаланса | 1983 |
|
SU1193474A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ И ФАЗЫ ДИСБАЛАНСА | 1992 |
|
RU2057308C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО БАЛАНСИРОВОЧНОГО СТАНКА | 1985 |
|
SU1338557A1 |
| Устройство для определения параметров вектора дисбаланса ротора | 1981 |
|
SU996885A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повьциение точности за счет исключения динамической погрешности. По окружности ротора 4 наносят II равноудалённых мето/с 5, одну из них принимают за нулевую метку 6. При вращении ротора 4 фиксируют сигналы с датчиков 1,2 и 3 дисбаланса, нулевой метки и ме- ток. В счетчике 17 меток отсчитывают число меток от нулевой до метки, совпадающей с моментом перехода через нуль сигнала с датчика 1 дисбаланса, (Л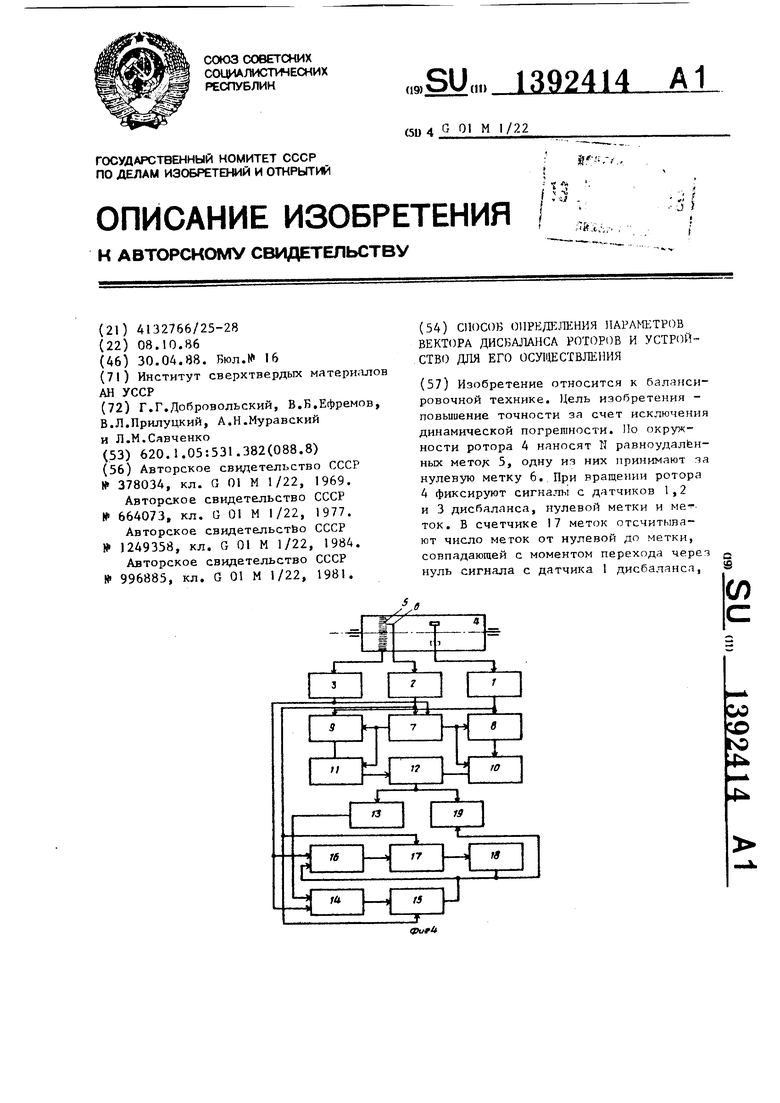
Изобретение относится к балансировочной технике и может быть использовано при балансировке роторов различных машин, а также прецизионных станков в условиях повышенных вибраций фундаментов.
Цель изобретения - повышение точности за счет исключения динамической погрешности, достигаемое путем учета изменения скорости вращения за один оборот.
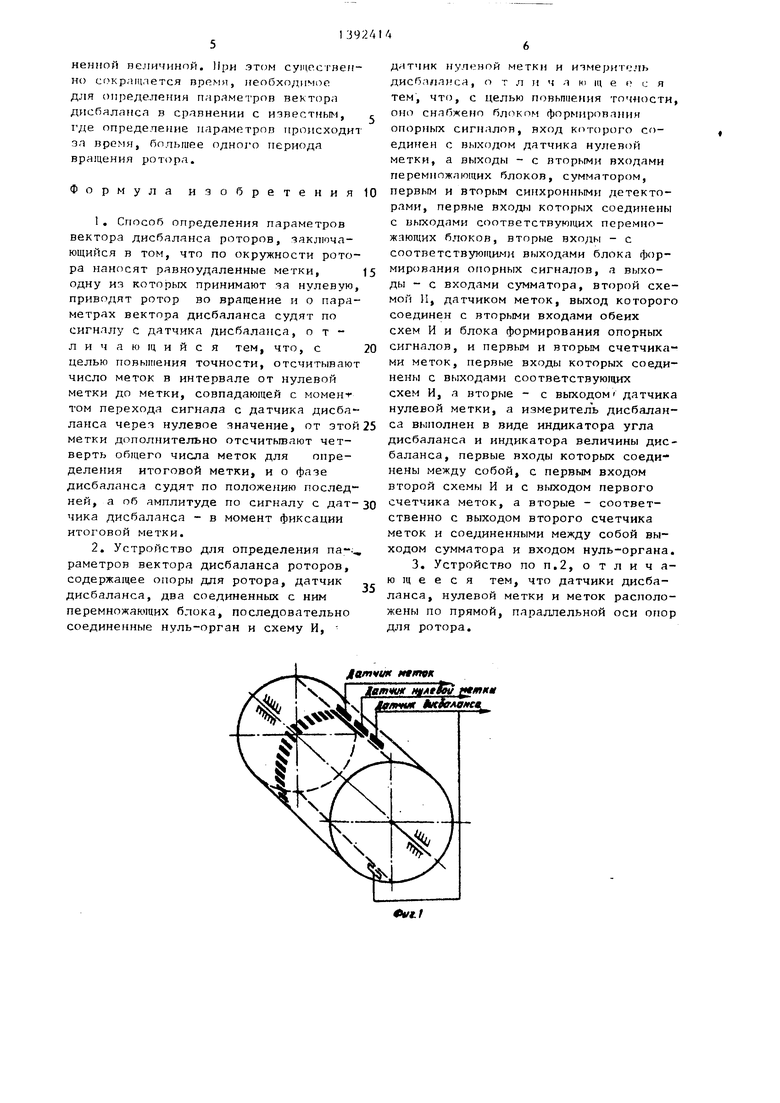
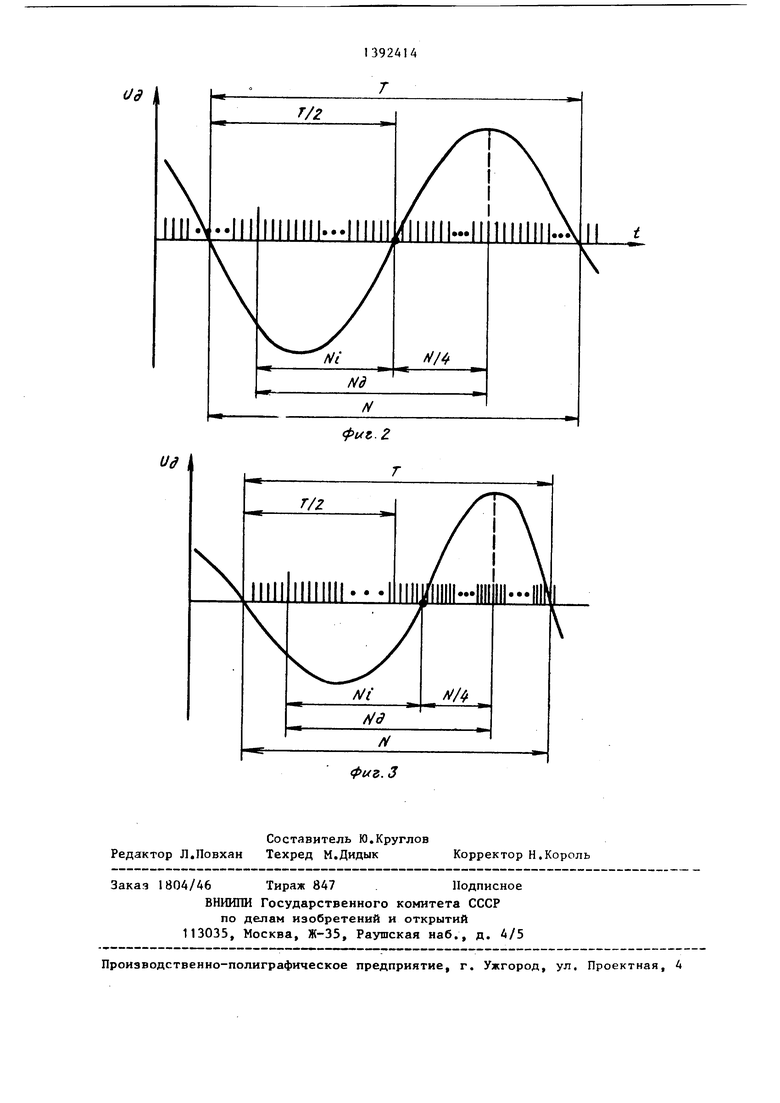
На фиг,1 представлен балансируемый ротор с нанесенными метками и установленными датчиками, общий вид; на фиг,2 - эпюра сигнала дисбаланса при постоянной скорости вращения ротора; на фиг,3 - то же, при перемен-- ной скорости вращения ротора} на фиг.4 - функциональная схема устройства.
Способ определения параметров век тора дисбаланса заключается в том, что наносят по окружности N равноудаленных меток, одну из которых принимают за нулевую, отмечая ее любым известным способом, приводят ротор во вращение, фиксируют сигнал с датчика дисбаланса, отсчитывают число N меток от нулевой метки до метки, совпадающей с моментом перехода через нулевое значение сигнала с датчика дисбаланса, от этой метки отсчи- тьшают дополнительно N/4 меток для определения итоговой метки, определяемой числом Nq, и по сигналу с датчика дисбаланса в момент фиксации итоговой метки NO судят об амплитуде дисбаланса, а по положению итоговой метки - о фазе дисбаланса, определяе мой как f .
Устройстве для реализации способа содержит датчики 1,2 и 3 дисбалянся
0
5
0
0
5
0
нулевой метки и меток, расположенных на прямой, параллельной оси опор для ротора 4, на который нанесены метки 5 и нулевая метка 6, блок 7 формирования опорных сигналов, входы которого соединены с выходами датчиков 2 и 3 нулевой метки и меток, первый и второй перемножающие блоки 8 и .9, входы которых соединены с выходом датчика 1 дисбаланса, первый и второй синхронные детекторы 10 и II, первые входы которых соединены с выходами соответствую1цих перемножающих блоков 8 и 9, а вторые - со вторыми входами последних и с соответствующими выходами блока 7 формирования опорных сигнаглов, последовательно соединенные сумматор 12, входы которого соединены с выходами синхронных детекторов 10 и 11, нуль-орган 13, схему И 14 и счетчик 15 меток, последовательно соединенные вторую схему И 16, второй вход которой соединен с вторым входом первой схемы И 14 и выходом датчика 3 меток, и второй счетчик 17 меток, второй вход которого соединен с вторым входом первого счетчика 15 меток и с выходом датчика 2 нулевой метки, и измеритель дисбаланса, выполненный в виде индикатора I8 угла дисбаланса и индикатора 19 величины дисбаланса, первые входы которых со единены между собой, с первым входом второй схемы И 16 и с выходом первого счетчика 15 меток, а вторые - соответственно с выходами второго счетчика 17 меток и суммато - ра 1 2.
Блок формирования опорных сигналов представляет собой квадратурный цифровой генератор.
ИеремипА люнщк блоки и cnnxpmini.ie етектор), ВЫНОЛПГЕНЫ на основе лнфро- 1ичлогового пре.обрачовятеля.
Индикаторы величины дисб.члансл и угла дисбал 1Нса выполнены с злпс мпна- нием и меняют свои показания только в момент фиксации итоговой метки.
Сумматор, нуль-орган и счетчики меток могут быть вьпшлнены по любо IQ известной в технике схеме.
Устройство работает следующим образом.
Раскручивается ротор 4 (фиг,5) с нанесенными на него метками 5 и 6. 15 При прохождении нулевой метки 6 мимо атчика 2 нулевой метки на его выхое формируется сигнал, который устанавливает в исходное нулевое состояние счетчики 15 и 17 меток, предназ- о наченные соответственно для подсчета N/4 и N меток.
Одновременно сигнал, nponopjiHO- нальный механическим колебаниям ротора А, с выхода датчика I дисбаланса 25 поступает на входы перемножакицих блоков 8 « 9, на другие входы которых поступают напряжения с блока 7 форирования опорных сигналов, меняюиеся по синусоидальному закону и 30 сдвинутые один относительно другого на 90 с частотой, равной частоте вращения ротора 4. Управление блоком 7 формирования опорных сигналов осуществляется сигналами датчика 2 нуле- с вой метки и датчика 3 меток угла ротора. Сигналы дисбаланса с выходов перемножающих блоков 8 и 9 поступают на входы соответствующих синхронных етекторов 10 и 11. На другие входы до синхронных детекторов 10 и II поступают сигналы с выходов блока 7 формирования опорных сигналов. Далее сигналы с выходов синхронных детекторов 10 и 11 поступают на входы сумматора 45 12, на выходе которого формируется синусоидальный сигнал оборотной час- тоты, амплитуда которого пропорциональна амплитуде вектора дисбаланса, а фазовая характеристика соответству- gg ет фазовой характеристике вектора дисбаланса Этот сигнал поступает на индикатор 19 величины дисбаланса и в нуль-орган 13. На выходе нуль-органа 13 логический сигнал запрещает . gc прохождение импульсов с вькода датчика 3 меток угла ротора через первую схему И 14 на вход первого счетчика 15 меток. Уровень логического сигнала
пз вьгходе последнего рлз1-)ег11.чет прохождение импульсных сигналов черр:з вторую сх( му Л 16 от датчика 3 метпк угла ротора лл вход второго счетчикп
17меток. В тот момент, когда сигнлл дисбаланса нл выходе сумматора 12 пересекает нулевую ось (фиг.З), на выходе нуль-органа 13 формируется упраляющий сигнлл, разрешающий прохождение импульсов от датчика 3 меток
угла ротора через первую схему И 14 на выход первого счетчика 15 меток, который отсчитывает одновременно с вторым счетчиком 17 меток количество меток, нанесенных на четвертую часть окружности ротора.
После того, как счетчик 15 отсчи- тает количество импульсов, равное количеству меток, нанесенных нл четвертую часть окружности ротора 4, на его выходе появляется управляющий сигнал, который запрещает прохождени импульсов от датчика 3 меток угла ро тора через вторую схему И 16 на вход второго счетчика 17 меток, который останавливается и на его выходе устанавливается код, соответствующий количеству меток от нулевой до итоговой.
В момент, когда происходит остановка второго счетчика 17 меток, производится фиксация амплитуды вектора дисбаланса индикатором 19 величины дисбаланса и фазы индикатора
18угла дисбаланса. При дальнейтием вращении ротора 4 цикл измерения повторяется на каждом следующем обороте.
Предлагаемый способ позволяет определить угол If вектора дисбаланса
с погрешностью У fj 100%, которая
определяется количеством меток, нанесенных на ротор.
При нанесении на ротор, например, 4096 меток погрешность определений угла Cf вектора дисбаланса не превышает 0,08-0,09..
Кроме того, исключается погрешность довольно сложных вычислений, а также погрешность при измерениях, которая составляет порядка 5-10%.
Таким образом, точность определения угла вектора дисбаланса повысилась в 4-10 раз, пов1,пиение точности определения величины вектора дисбаланса происходит за счет исключения подмены его истинного значения усредненной величинпй. При су|цо.стне1г- Н() сокращлется время, необходимое для определения паряметров вектора дисбяланса в сравнении с известным, где определение параметров происходит за время, большее одно1 о периода вращения ротора.
Формула из обретения
1 Способ определения параметров вектора дисбаланса роторов, заключающийся в том, что по окружности ротора наносят равноудаленные метки, одну из которых принимают за нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, отличающийся тем, что, с целью повышения точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с MOMeHf том перехода сигнала с датчика дисбаланса через нулевое значение, от этой метки дополнительно отсчитьгоают чет- вертг общего числа меток для определения итоговой метки, и о фазе дисбаланса судят по положению последней, а об амплитуде по сигналу с дат- чика дисбаланса - в момент фиксации итоговой метки.
2, Устройство для определения па-.„ раметров вектора дисбаланса роторов, содержащее опоры для ротора, датчик дисбаланса, два соединенных с ним перемножающих блока, последовательно соединенные нуль-орган и схему И,
датчик нулевой метки и измеритг;ль дисбаланса, о т л и ч а к) щ е с я тем, что, с целью повьпиения точности, оно снабжено блоком формировании опорных сигналов, вход которого соединен с выходом датчика нулевой метки, а выходы - с вторыми входами перемножающих блоков, сумматором, первым и вторым синхронными детекторами, первые входы которых соединены с выходами соответствующих перемножающих блоков, вторые входы - с соответствующими выходами блока формирования опорных сигналов, а выходы - с входами сумматора, второй схемой И, датчиком меток, выход которого соединен с вторыми входами обеих схем И и блока формирования опорных сигналов, и первым и вторым счетчиками меток, первые входы которых соединены с выходами соответствующих схем И, а вторые - с выходом датчика нулевой метки, а измерител ь дисбаланса выполнен в виде индикатора угла дисбаланса и индикатора величины дисбаланса, первые входы которьк соединены между собой, с первым входом второй схемы И и с выходом первого счетчика меток, а вторые - соответственно с выходом второго счетчика меток и соединенными между собой выходом сумматора и входом нуль-органа. 3. Устройство по п.2, о т л и ч а- ю щ е е с я тем, что датчики дисбаланса, нулевой метки и меток расположены по прямой, параллельной оси опор для ротора.
нвток
Матчая MjAtiou fffHUii wwr JucfffMOftee
llilN-lil
фut.Z
Ud
