Изобретение относится к технике измерения положения и скорости вращения механических валов, конкретнее к датчикам положения и направления вращения механических валов.
Цель изобретения - повышение надежности контроля и измерения при произвольных режимах вращения вала. На фиг. 1 изображена электрическая принципиальная схема устройства; на фиг. 2 - временные диаграммы потенциалов некоторых точек схемы.
Устройство состоит из датчиков 1-3, RS-триггеров 4-6, одновибрато- ров 7-9, регистров 10-12 сдвига, логического элемента ИЛИ .13, линии 14 задержки, логических элементов И 15 и 16, реверсивного счетчика 17. Элементы 4-16 образуют блок преобразования. Выход каждого из трех датчиков 1-3 соединен с S-входами соответствующих RS-триггеров 4-6 и одним из R- входов двух других триггеров. Выходы RS-триггеров 4-6 соединены с информационными входами регистров 10-12 сдвга и входами одновибраторов 7-9 через трехвходовой элемент ИЛИ 13 соединены с входом линии 14 задержки, отвод которой соединен с инверсным динамическим входом записи в первую ячейку и с прямым динамическим входом сдвига информации каждого из регистров 10-12 сдвига. Выход линии 14 задержки сое динен с первыми входами элементов И 15 и 16, вторые входы которых соединены с выходом второ ячейки регистра 11 сдвига. Третий и четвертый входы элемента И 15 соединены с выходом третьей ячейки регистра 12 сдвига соответственно. Третий и четвертый входы элемента И 16 соединены с выходом третьей ячейки регистра 10 сдвига и выходом первой ячейки регистра 12 сдвига соответственно. Выходы элементов И 15 и 16 соединены с входами сложения и вычитания реверсивного счетчика 17.
Уровню Лог. 1 соответствует высокий уровень напряжения, а уровню Лог. О - низкий уровень напряжения (фиг. 2). Диаграммы 1-3 потенциалы выходов датчиков 1-3 соответственно диаграммы 4-6 - потенциалы прямых выходов RS-триггеров 4-6 соответственно, диаграммы 7-9 - потенциалы входа, отвода, выхода линии задержки соответственно, диаграммы 10 и 11 - потенциалы выходов первой и третьей ячейки регистра 10
5
0
сдвига соответственно, диаграмма 12 - потенциал выхода второй ячейки регистра 11 сдвига, диаграммы 13 и 4 - потенциалы выходов первой и третьей ячеек регистра 12 сдвига соответственно, диаграммы 15 и 16 - потенциалы входов сложения и вычитания реверсивного счетчика 17 соответственно.
Уст ройство работает следующим образом.
При вращении вала на выходах датчиков 1-3 последовательно появляются сигналы Лог. 1, каждый из которых устанавливает в единичное состояние RB-триггеры 4-6 соответственно, а два других RS-триггера устанавливает в состояние Лог. О. Например, сигнал датчика 1 устанавливает в состояние Лог. 1 триггер, 4 и в состояние Лог. о триггеры 5 и 6, сигнал датчика 2 в состояние Лог. 1 триггер 5 и в состояние Лог. О триггеры 4 и 6. При вращении вала в одном направлении состояние Лог. 1 у триггера 4 устанавливается в период времени t;,-t (фиг. 2). у триггера 5 - в период времени tj-tj, а у триггера 6 - в период времени tj-t,.
п
При вращении вала в противоположном направлении состояние Лог. у триггера 4 устанавливается в период времени , у триггера 5 - в период времени , а у триггера 6 - в период времени . При появлении сигнала Лог. 1 на выходе триггеров 4-6 одновибратор, соединенный с данным триггером, генерирует одиночный импульс. Совокупность импульсов всех одновибраторов является последовательностью тактовых импульсов, образуется на выходе элемента 13 и используется дпя сдвига информации в ячейках регистров 10-12 и для об5
5
0
5 разования выходных сигналов блока преобразования,
По фронту каждого тактового им- . пульса происходит сдвиг информации . в регистрах 10-12 в направлении от
0 ячейки 1 к ячейке 3j по спаду каждого тактового импульса происходит запись состояния триггера в первую ячейку регистра, соединенного с данным триггером.
55 Таким образом, в период времени t -t на трех входах элемента HI 15 устанавятся потенциалы, соответствующие состояниям триггера 4 в период , триггера 5 в период ,
триггера 6 в период , на трех входах элемента И 16 установятся потенциалы, соответствующие состояни- .ям триггера 4 в период t,-t , триггера 5 в период tj-tj, триггера 6 в период . В соответствии с алгоритмом временного расположения сигналов датчиков в зависимости от направления вращения в указанные периоды времени на выходах триггеров по- являются потенциалы Лог. 1, Поэтому в период времени t,-t. на каждый
Э т
из трех входов элемента 15 или 16 , (в зависимости от направления вращения вала) поступает сигнал Лог. 1, разрешающий прохождение одиночного импульса с выхода линии 14 задержки на соответствующий выход блока преобразования, В этот период времени прохождение импульса через другой элемент И блокируется потенциалом Лог. о, поступающим с другого выхода регистра. Ошибки в определении углового положения вала при любых режимах вращения исключаются, так как сигнал на выходах блока преобразования (выходы элементов 15 и 16) появляется лишь в случае действия на входы блока преобразования (Б-входы элементов 4-6) строго определенной во времени последовательности сигна - лов от датчиков 1-3.
Формула изобретения
Устройство дпя контроля направления вращения и измерения угла поворота, содержащее три датчика углового положения, реверсивный счетчик, три RS-триггера, два элемента И, эле мент ИЛИ и линию задержки, причем выходы первого и второго датчиков соединены с S-входами первого и второго RS-триггеров соответственно.
с 0
5 0 5 о
5
л
отличающееся тем, что, с целью повьш1ения надежности контроля и измерения при произвольных режимах вращения, в него введены три регистра сдвига, три одновибратора, при этом элементы И выполнены с четырьмя входами, элемент ИЛИ с тремя, причем выход первого датчика соединен с первыми R-входами второго и третьего RS-триггеров, выход второго датчика - с первым R-входом первого RS-триггера rt вторым Н-вхо- дом третьего RS-триггера, выход третьего, датчика - с S-входом третьего RS-триггера и вторыми R-входами первого и второго RS-триггеров, выход каждого RS-триггера соединен с информационным входом соответствующего ) регистра сдвига и входом соответствующего одновибратора, выходы од- новибраторов через трехвходовой элемент ИЛИ соединены с входом линии задержки, промежуточный выход которой соединен с инверсными динамическими входами записи и прямыми динамическими входами сдвига информации каждого из регистров сдвига, выход линии задержки соединен с первыми входами элементов И, вторые входы которых соединены с выходом второй ячейки второго регистра сдвига, третий и четвертый входы первого элемента И соединены с выходом первой ячейки первого регистра сдвига и выходом третьей ячейки третьего регистра сдвига соответственно, третий и четвертый входы второго элемента И соединены с выходом третьей ячейки первого регистра сдвига и выходом Первой- ячейки третьего регистра сдвига соответственно, а выходы элементов И соединены с входами сложения и вычитания реверсивного счетчика соответственно.
Редактор Н.Рогулич
Составитель В.Журавлев Техред Л.Олкйнык
Заказ 4214/34
Тираж 776. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений н открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
Фаг. 2
Корректор А, Зимокосов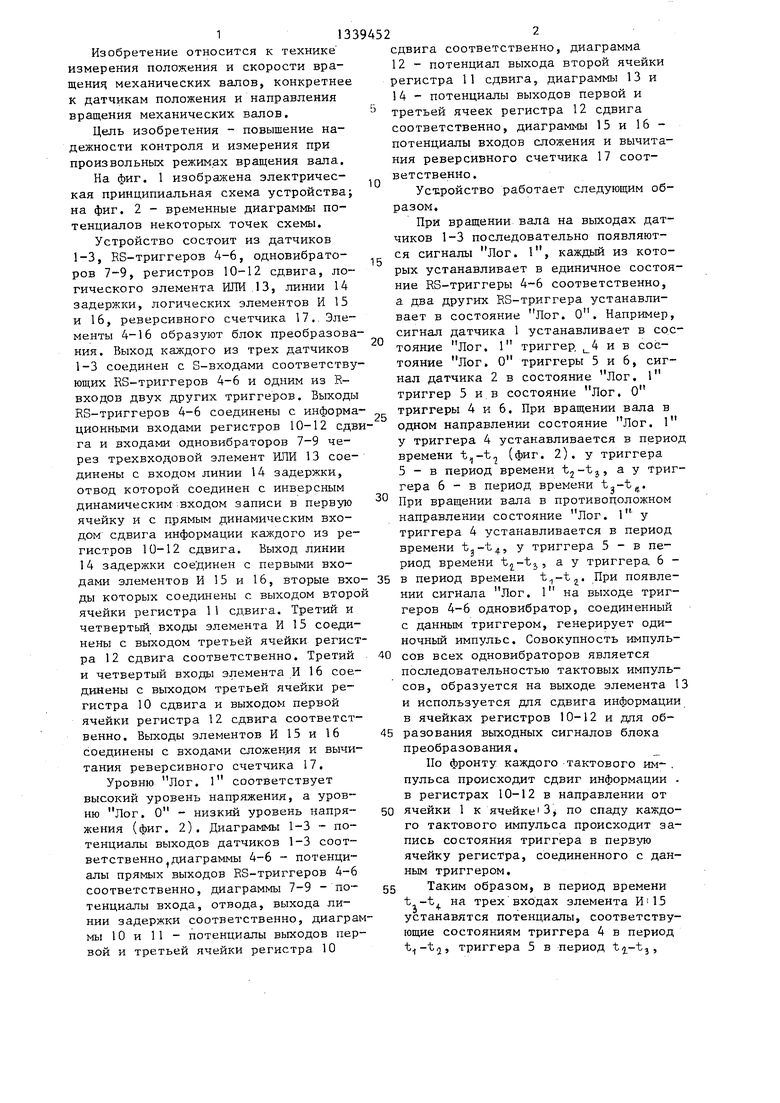

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля направления вращения и угла поворота | 1984 |
|
SU1191828A1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Многочастотный цифровой фильтр | 1987 |
|
SU1474827A1 |
| Устройство измерения угла опережения впрыска топлива дизеля | 1984 |
|
SU1229413A1 |
| Автоматизированный регулятор частоты | 1985 |
|
SU1309252A2 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Устройство для ввода учебной информации | 1990 |
|
SU1732369A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Биотехническое адаптируемое устройство для бесклавишного ввода информации | 1987 |
|
SU1576901A1 |
| Ультразвуковой расходомер | 1981 |
|
SU1024726A1 |
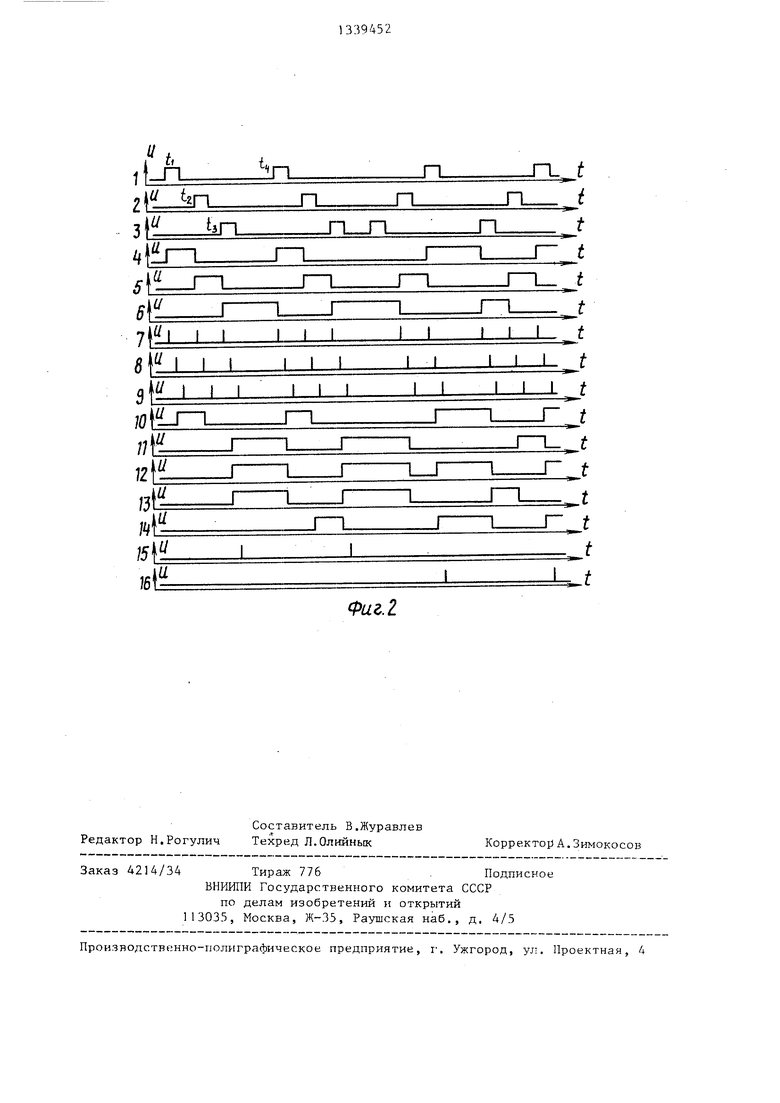
Изобретение относится к датчикам положения и направления вращения механических валов. Цель изобретения - повышение надежности контроля и измерения при произвольных режимах вращения вала. Ошибки в определении углового положения вала при любых режимах вращения исключаются, так как сигнал на выходах блока преобразования (выходы элементов И 15, 16) появляется лишь в случае действия на входах блока преобразования (S-входы триггеров 4, 5, 6) строго определенной во времени последовательности сигналов от датчиков 1, 2, 3. 2 ил. (Л с со ОО со 4 СЛ ГчЭ
| 0 |
|
SU156003A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Реверсивный дискретный датчик направления движения | 1983 |
|
SU1140046A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
