1
Изобретение относится к весоизмерительной технике, а более конкретно к автомобильным и вагонным весам.
Целью изобретения является повышение точности взвешивания и снижение трудоемкости монтажа весов.
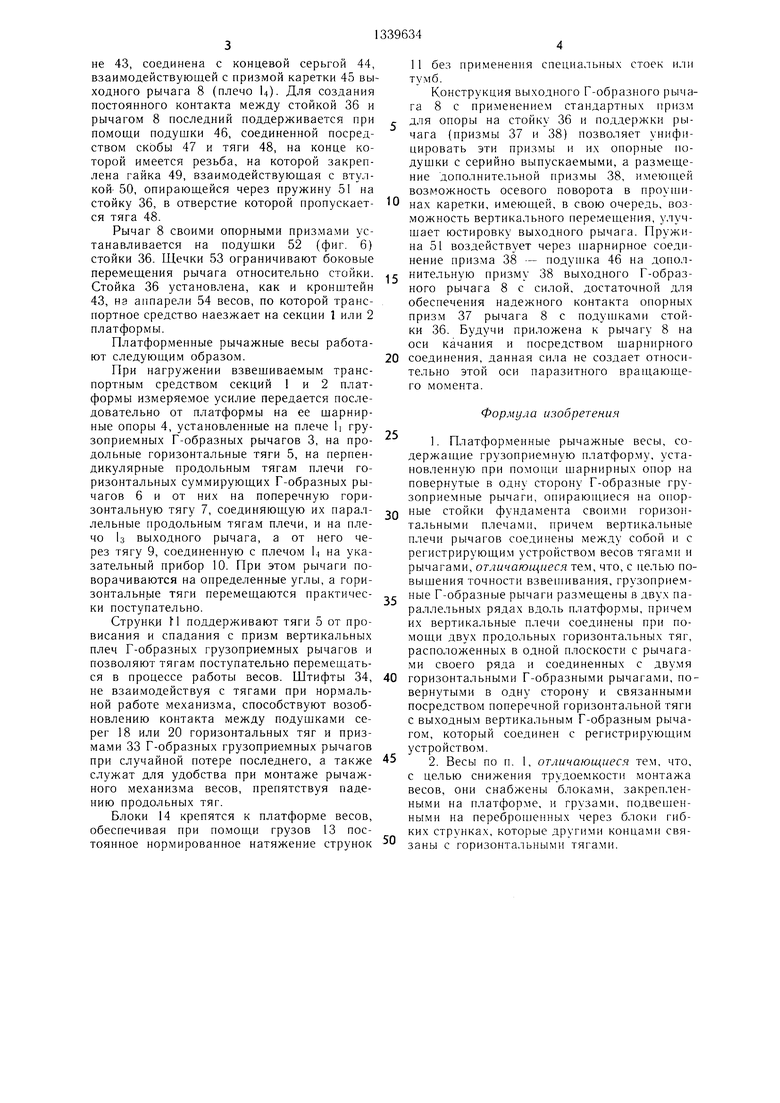
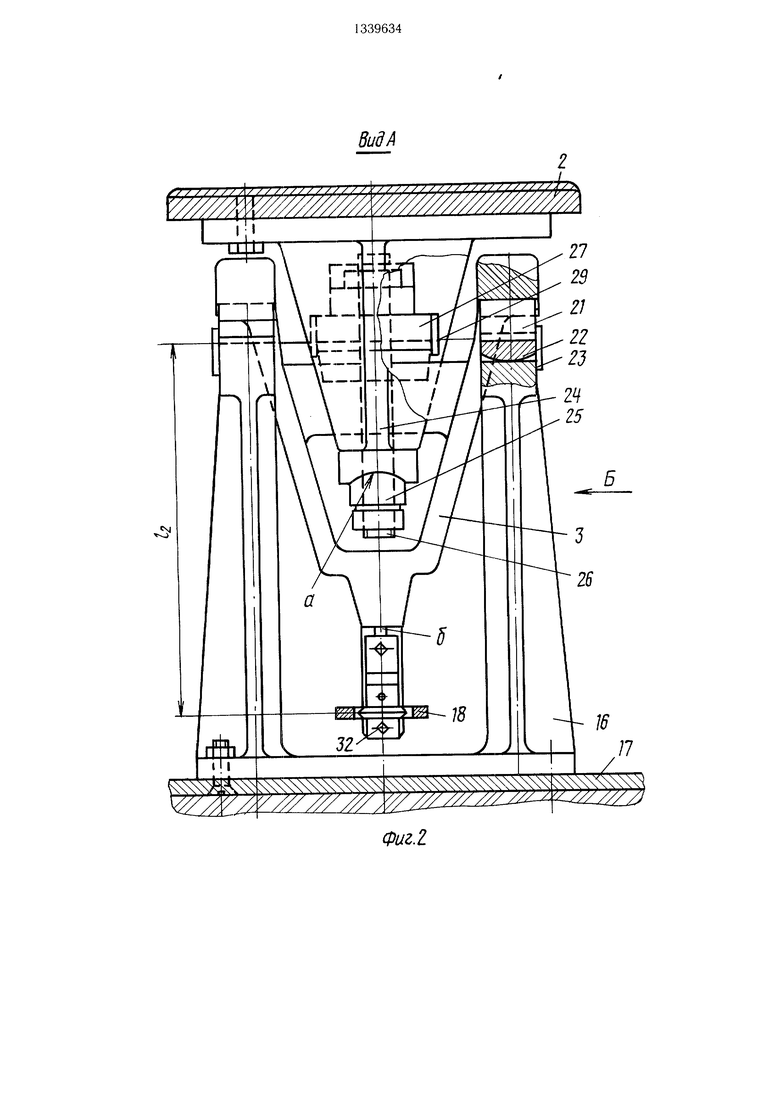
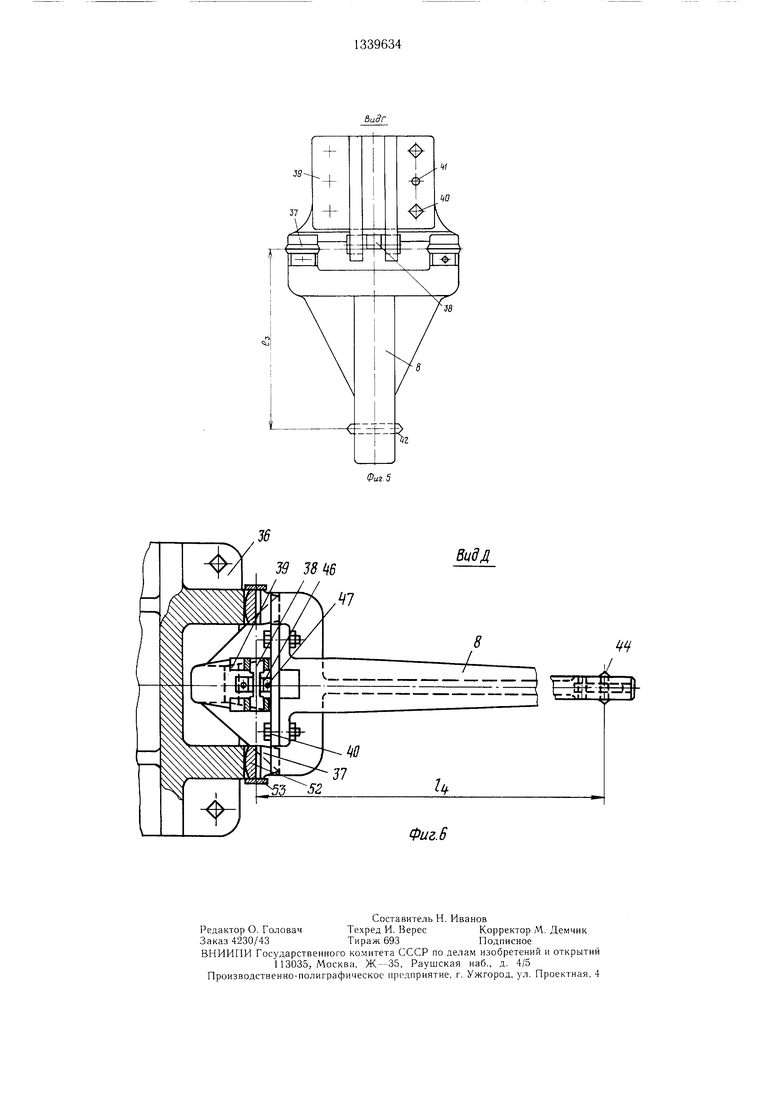
На фиг. 1 изображена кинематическая схема варианта исполнения весов, аксонометрия; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 -- вид В на фиг. 1; на фиг. 5 - вид Г на фиг. 4; на фиг. 6 - вид Д на фиг. 4.
Платформенные рычажные весы (фиг. 1) содержат секции 1 и 2 (которых может быть до четырех) нлатформь, которая опирается на вертикальные грузоприемные Г-образнь е рычаги 3 посредством шарнирных опор 4, горизонтальные продольные тяги 5, связывающие вертикальные плечи грузоприемных Г-образных рычагов с горизонтальными Г-об- разными рычагами 6, которые, в свою очередь, посредством понеречной горизонтальной тяги 7 соединены с вертикальным плечом выходного Г-образного рычага 8. Горизонтальное плечо рычага 8 соединяется при помощи тяги 9 с указательным прибором 10. Горизонтальные продольные тяги 5 от провисания поддерживаются при помощи струнок 11 и снабжены для регулировки длины талрепами 12. Струнки 11 гибкие и натягиваются грузом 13, закрепленным на перекинутом через блок 14 конце струнки. Блоки 14 закреплены на платформе весов, что дает возможность крепления струнок 11 без применения тумб или стоек.
Платформа весов может состоять из нескольких шарнирно соединенных секций 1-2 одна из которых имеет четыре точки опоры, а вторая, третья или четвертая - две и два шарнирных соединения 15, которые закреплены к первой (второй или третьей) платформе. Таким образом, смежная с первой (вторая, третья и четвертая) платформа, опираясь на нее (вторую или третью платформу), приобретает две дополнительные точки опоры. При этом уменьшается общее количество грузоприемных рычагов, их опорных стоек, что ведет не только к снижению металлоемкости, но и увеличению точности взвешивания секционных весов по сравнению с точностью взвещивания нескольких обычных четырех опорных весов, установленных в один ряд.
Грузоприемный Г-образный рычаг 3 опирается на опорную стойку 16, закрепленную на раме 17 весов, которая устанавливается на подготовленную площадку (имеющую твердое покрытие) и закрепляется на ней (фиг. 2).
Продольная тяга 5 соединяется с помощью концевой серьги 18 и скобы 19 с первым (фиг. 1, правый справа) грузоприем- ным Г-образным рычагом (плечо U) и горизонтальным Г-образным рычагом 6. С вторым
339634
и третьим грузонриемными рычагами продольная тяга соединяется с по.мощью промежуточной серьги 20. Опорные призмы 21 грузоприемного Г-образного рычага взаимо- 5 действуют с подушками 22 опорной стойки 16. Щечки 23 ограничивают горизонтальное перемещение рычага 3 по подушкам стойки.
Шарнирные опоры 4 состоят из стойки 24, закрепленной к одной из секций 1-2 платформы и установленной на нижней траверсе 25, имеющей две цилиндрические опорные поверхности а. Стойка также имеет цилиндрические канавки, контактирующие с опор- Еъши поверхностями а траверсы. Нижняя 15 траверса 25 соединяется с помощью щпи- лек 26 с верхней траверсой 27, которая имеет качающую подушку 28 и щечки 29, (плечо 1|) и взаимодействует с грузопри- емной призмой 30 рычага 3.
10
0 На вертика;1ьном плече U грузоприемного Г-образного рычага 3 (фиг. 3) установлена каретка 31, которая имеет возможность вертика.чьного пере.мещения по пазу б рычага 3 для регулировки перег даточного отнощения f грузоприемного рычага, с последующим стопорением болтами и щтифтом 32. Серьга 18 или 20 взаимодействует с призмой 33 каретки 31, установленные относительно серьги 18 или 20 с зазором б. Грузоприемная призма 30 рыQ чага 3 установлена в пазу перемычки г рычага и крепится в нем сухарем 35.
Поперечная горизонтальная тяга 7 соединяется с помондью концевой серьги 18 и скобы 19 с дальним от указательного прибора (фиг. 1) Г-образным рычаго.м 6 и вер5 тикальным плечом 1з выходного вертикального Г-образного рычага 8. С другим (ближним) горизонтальным Г-образным рычагом 6 поперечная тяга 7 соединяется с помощью промежуточной серьги 20.
Выходной вертикальный Г-образный ры0 чаг 8 установлен на стойке 36 (фиг. 4) при помощи опорных призм 37, закрепленных на выступах рычага. Дополнительная призма 38, которая закреплена в проушинах каретки 39, имеющей возможность вертикального перег мещения относительно рычага 8, имеет также при необходимости воз.можность осевого поворота относительно своей оси с дальнейшей фиксацией в коническом отверстии каретки 39. Призма 38 устанавливается на оси качания рычага (на одной линии с опор0 ными призмами 37). После этого производится закрепление каретки 39 при помощи болтов 40 и штифтов 41 (фиг. 5) к рычагу 8. Тяга 7 взаимодействует при помощи концевой серьги 18 с призмой 42 (плечо l.-j) выходного рычага 8, который,
5 опираясь на стойку 36 посредством опорных призм 37, передает усилие взвещивания на указательный прибор 10. При этом тяга 9 прибора 10, установленного на кро}11птейне 43, соединена с концевой серьгой 44, взаимодействующей с призмой каретки 45 выходного рычага 8 (плечо U). Для создания постоянного контакта между стойкой 36 и рычагом 8 последний поддерживается при помощи подушки 46, соединенной посредством скобы 47 и тяги 48, на конце которой имеется резьба, на которой закреплена гайка 49, взаимодействующая с втулкой- 50, опирающейся через пружину 51 на стойку 36, в отверстие которой пропускается тяга 48.
Рычаг 8 своими опорными призмами устанавливается на подущки 52 (фиг. 6) стойки 36. Щечки 53 ограничивают боковые перемещения рычага относительно стойки. Стойка 36 установлена, как и кронштейн 43, нэ аппарели 54 весов, по которой транспортное средство наезжает на секции 1 или 2 платформы.
Платформенные рычажные весы работают следующим образом.
При нагружении взвешиваемым транспортным средством секций 1 и 2 платформы измеряемое усилие передается последовательно от платформы на ее шарнирные опоры 4, установленные на плече Ь гру- зоприемных Г-образных рычагов 3, на продольные горизонтальные тяги 5, на перпендикулярные продольным тягам плечи горизонтальных суммирующих Г-образных рычагов 6 и от них на поперечную горизонтальную тягу 7, соединяющую их параллельные продольным тягам плечи, и на плечо 1з выходного рычага, а от него через тягу 9, соединенную с плечом l.i на указательный прибор 10. При этом рычаги поворачиваются на определенные углы, а гори- зонтальн.ые тяги перемещаются практически поступательно.
Струнки И поддерживают тяги 5 от провисания и спадания с призм вертикальных плеч Г-образных грузоприемных рычагов и позволяют тягам поступательно перемещаться в процессе работы весов. Штифты 34, не взаимодействуя с тягами при нормальной работе механизма, способствуют возобновлению контакта между подушками серег 18 или 20 горизонтальных тяг и призмами 33 Г-образных грузоприемных рычагов при случайной потере последнего, а также служат для удобства при монтаже рычажного механизма весов, препятствуя падению продольных тяг.
Блоки 14 крепятся к платформе весов, обеспечивая при помощи грузов 13 постоянное нормированное натяжение струнок
0
11 без применения спецнальны.х стоек или тумб.
Конструкция вы.ходного Г-образного рычага 8 с применением стандартных призм для опоры на стойку 36 и поддержки рычага (призмы 37 и 38) позволяет унифицировать эти призмы и их опорные подушки с серийно выпускаемыми, а размеше- ние дополнительной призмы 38, имеющей возможность осевого поворота в проуп1И- нах каретки, имеющей, в свою очередь, возможность вертикального перемещения, улуч- щает юстировку выходного рычага. Пружина 51 воздействует через нарнирное соединение призма 38 - подушка 46 на допол5 нительную призму 38 выходного Г-образного рычага 8 с силой, достаточной для обеспечения надежного контакта опорных призм 37 рычага 8 с пoдyпJкaми стойки 36. Будучи приложена к рычагу 8 на оси качания и посредством щарнирного
0 соединения, данная сила не создает относительно этой оси паразитного врангающе- го момента.
Формула изобретения
1. Платформенные рычажные весы, содержащие грузоприемную платформу, установленную при помощи шарнирных опор на повернутые в одну сторону Г-образные гру- зоприемные рычаги, опирающиеся на опорные стойки фундамента своими горизонтальными плечами, причем вертикальные плечи рычагов соединены между собой и с регистрирующим устройством весов тягами и рычагами, отличающиеся тем, что, с целью повышения точности взвешивания, грузоприемные Г-образные рычаги размещены в двух параллельных рядах вдоль платформы, причем их вертикальные плечи соединены при помощи двух продольных горизонтальных тяг, расположенных в одной плоскости с рычагами своего ряда и соединенных с дву.мя
горизонтальными Г-образными рычагами, повернутыми в одну сторону и связанными посредством поперечной горизонтальной тяги с выходным вертикальным Г-образным рычагом, который соединен с регистрирующим устройством.
2. Весы по п. 1, отличающиеся тем, что, с целью снижения трудоемкости монтажа весов, они снабжены блоками, закрепленными на платформе, и груза.ми, подвешенными на nepe6poujeHHbix через блоки гибких струнках, которые другими концами связаны с горизонтальными тягами.
Фиг. г
l ; l/ :lji:2: 2il/
II
33 31
33 31
| название | год | авторы | номер документа |
|---|---|---|---|
| Платформенные весы | 1984 |
|
SU1247665A1 |
| Платформенные рычажные весы | 1983 |
|
SU1137300A1 |
| Устройство для взвешивания длинномерных грузов | 1981 |
|
SU1328683A1 |
| Весы для взвешивания животных | 1989 |
|
SU1765714A1 |
| Весовое устройство | 1989 |
|
SU1770767A1 |
| Устройство для определения моментного веса лопаток турбин | 1983 |
|
SU1143985A1 |
| Весы | 1990 |
|
SU1800283A1 |
| СТРУНКА ПОДВЕСКИ ВЕСОВ С ВЕРХНИМ РАСПОЛОЖЕНИЕМ ГРУЗОПОДЪЕМНОЙ ЧАШКИ | 1972 |
|
SU338792A1 |
| ВАГОННЫЕ ВЕСЫ ШИС | 1994 |
|
RU2082112C1 |
| Рычажные платформенные весы | 1985 |
|
SU1425464A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность взвешивания. Вдоль грузоприемной платформы 1, 2 в двух рядах размещены грузоподъемные Г-образные рычаги 3, вертикальные плечи которых соединены продольными горизонтальными тягами 5 с горизонтальными Г-образными рычагами 6. Струнки 11 исключают провисание тяг 5 и их спадание с призм вертикальных плеч Г-образных рычагов 3, а также обеспечивают поступательное перемещение тяг 5 в процессе взвещивания. Горизонтальное плечо выходного Г-образного рычага 8 посредством тяги 9 соединено с регистрирующим прибором 10. Прикрепленные к платформе 1, 2 блоки 14 обеспечивают постоянное нормированное натяжение струнок 11. 1 з.п. ф-лы, 6 ил. & /3 ft я .7 18 со со со О5 со 4
Ю
( ///j yjw 2 Y /jyZ-, /7/ ////
ФигМ
Tizzirrz -
lf-,zrii:ir :L
J7
ВцдД
Фиг. 6
| Платформенные рычажные весы | 1983 |
|
SU1137300A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1972 |
|
SU453584A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
