Изобретение относится к весоизмерительной технике и может быть использовано, например, для взвешивания автомобилей в движении.
Цель изобретения - повышение надежности и точности,
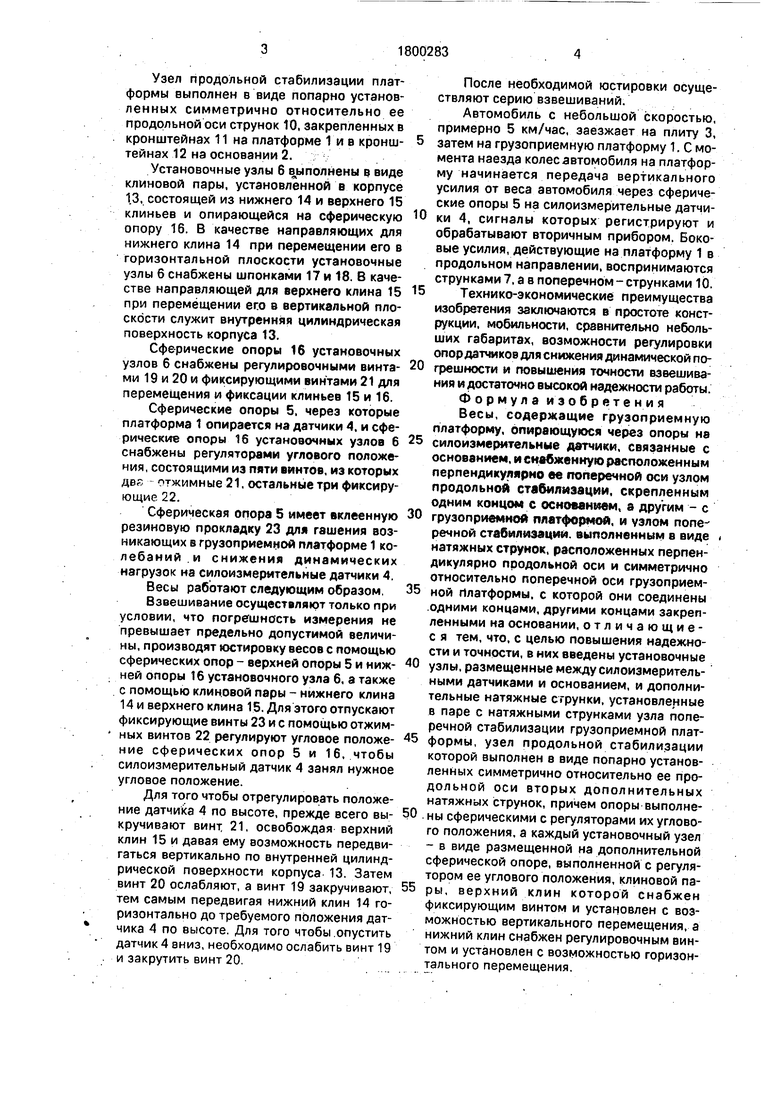
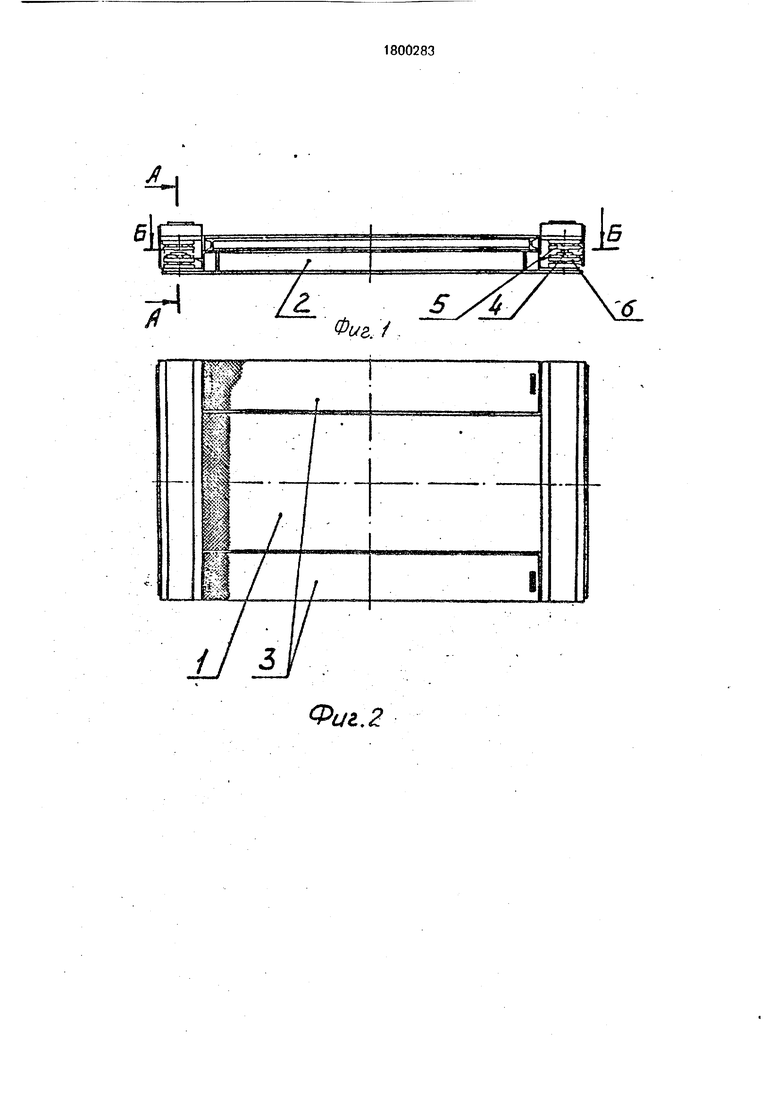
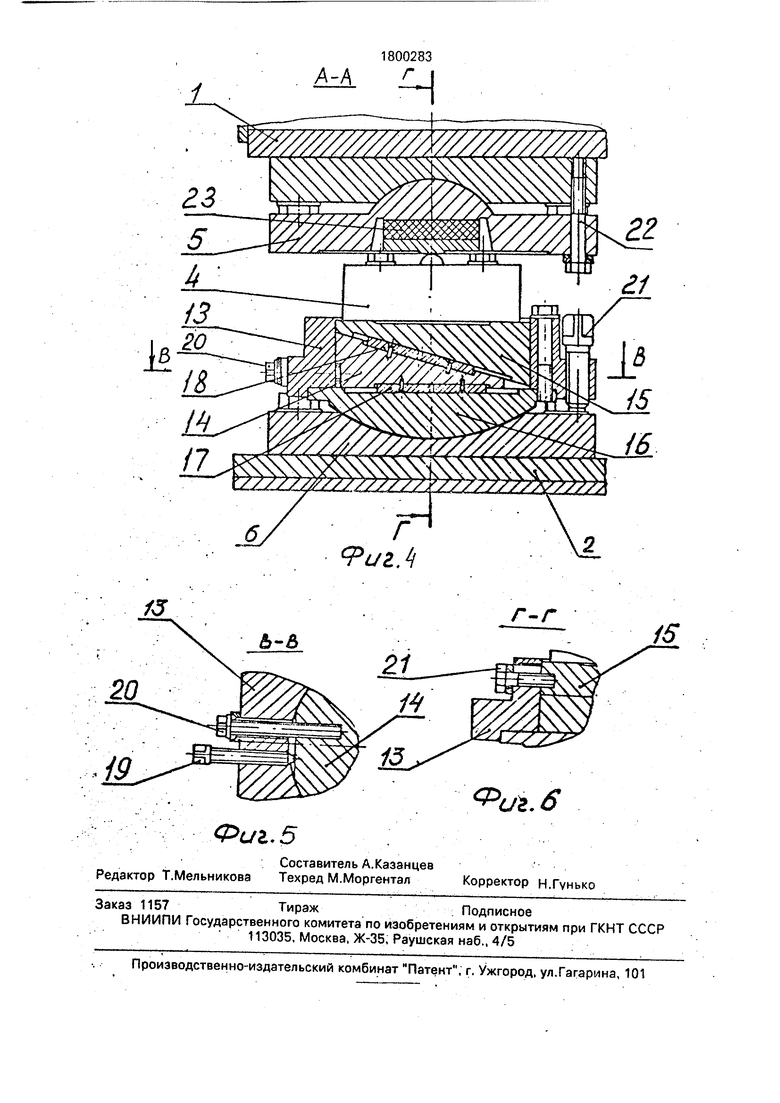
На фиг.1 изображены весы, вид спереди; на фиг.2 - то же, вид сверху; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез А-А на фиг.1; на фиг.5 - разрез В-В на фиг.4; на фиг.6 - разрез Г-Г на фиг.4.
Весы содержат грузоприемную платформу 1, основание 2,две плиты 3, предназначенные для наезда автомобиля, четыре силоизмерительных датчика 4, на которые
платформа 1 опирается через опоры 5, че- тыреустановочныхузла б, размещенных меж-1 ду силоизмерительными датчиками 4 и основанием 2, узел поперечной стабилизации и узел продольной .стабилизации грузоприемной платформы.
Узел поперечной стабилизации выполнен в виде натяжных струнок 7, расположенных перпендикулярно продольной оси и симметрично относительно поперечной оси грузоприемной платформы и закрепленных одними концами, в кронштейне 8, установленном на основании 2, а другими - в кронштейне 9, установленном на платформе 1.
00
о о
ю
09 0
Узел продольной стабилизации платформы выполнен в виде попарно установленных симметрично относительно ее продольной оси струнок 10, закрепленных в кронштейнах 11 на платформе 1 и в кронштейнах 12 на основании 2.
Установочные узлы 6 выполнены в виде клиновой пары, установленной в корпусе 13, состоящей из нижнего 14 и верхнего 15 клиньев и опирающейся на сферическую опору 16. В качестве направляющих для нижнего клина 14 при перемещении его в горизонтальной плоскости установочные узлы 6 снабжены шпонками 17 и 18. В качестве направляющей для верхнего клина 15 при перемещении его в вертикальной плоскости служит внутренняя цилиндрическая поверхность корпуса 13.
Сферические опоры 16 установочных узлов 6 снабжены регулировочными винтами 19 и 20 и фиксирующими винтами 21 для перемещения и фиксации клиньев 15 и 16.
Сферические опоры 5, через которые платформа 1 опирается на датчики 4, и сферические опоры 16 установочных узлов 6 снабжены регуляторами углового положения, состоящими из пяти винтов, из которых двд - отжимные 21, остальные три фиксирующие 22.
Сферическая опора 5 имеет вклеенную резиновую прокладку 23 для гашения возникающих в грузоприемной платформе 1 ко лебаний.и снижения динамических нагрузок на силоизмерительные датчики 4.
Весы работают следующим образом,
Взвешивание осуществляют только при условии, что погрешность измерения не превышает предельно допустимой величины, производят юстировку весов с помощью сферических опор - верхней опоры 5 и нижней опоры 16 установочного узла 6, а также с помощью клиновой лары - нижнего клина 14 и верхнего клина 15. Для этого отпускают фиксирующие винты 23 и с помощью отжим- ных винтов 22 регулируют угловое положение сферических опор 5 и 16, чтобы силоизмерительный датчик 4 занял нужное угловое положение.
Для того чтобы отрегулировать положение датчика 4 по высоте, прежде всего выкручивают винт; 21, освобождая верхний клин 15 и давая ему возможность передвигаться вертикально по внутренней цилиндрической поверхности корпуса 13. Затем винт 20 ослабляют, а винт 19 закручивают, тем самым передвигая нижний клин 14 горизонтально до требуемого положения датчика 4 по высоте. Для того чтобы .опустить датчик 4 вниз, необходимо ослабить винт 19 и закрутить винт 20.
После необходимой юстировки осуществляют серию взвешиваний.
Автомобиль с небольшой скоростью, примерно 5 км/час, заезжает на плиту 3,
затем на грузоприемную платформу 1. С момента наезда колес автомобиля на платформу начинается передача вертикального усилия от веса автомобиля через сферические опоры 5 на силоизмерительные датчики 4, сигналы которых регистрируют и обрабатывают вторичным прибором. Боковые усилия, действующие на платформу 1 в продольном направлении, воспринимаются струнками, а в поперечном-струнками 10.
5 Технико-экономические преимущества изобретения заключаются в простоте конструкции, мобильности, сравнительно небольших габаритах, возможности регулировки опор датчиков для снижения динамической по0 грешности и повышения точности взвешивания и достаточно высокой надежности работы. Формула изобретения Весы, содержащие грузоприемную платформу, опирающуюся через опоры на
5 силоизмерительные датчики, связанные с основанием, и снабженную расположенным перпендикулярно ее поперечной оси узлом продольной стабилизации, скрепленным одним концом с основанием, а другим - с
0 грузоприемной платформой, и узлом поперечной стабилизации, выполненным в виде натяжных струнок, расположенных перпендикулярно продольной оси и симметрично относительно поперечной оси грузоприем5 ной Платформы, с которой они соединены .одними концами, другими концами закрепленными на основании, отличающие- с я тем, что, с целью повышения надежности и точности, в них введены установочные
0 узлы, размещенные между силоизмеритель- ными датчиками и основанием, и дополнительные натяжные струнки, установленные в паре с натяжными струнками узла поперечной стабилизации груэоприемной плат5 формы, узел продольной стабилизации которой выполнен в виде попарно установленных симметрично относительно ее продольной оси вторых дополнительных натяжных струнок, причем опоры выполне0 ны сферическими с регуляторами их углового положения, а каждый установочный узел - в виде размещенной на дополнительной сферической опоре, выполненной с регулятором ее углового положения, клиновой па5 ры, верхний клин которой снабжен фиксирующим винтом и установлен с возможностью вертикального перемещения, а нижний клин снабжен регулировочным винтом и установлен с возможностью горизонтального перемещения.
Jg
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСЫ | 1994 |
|
RU2085869C1 |
| Весы для взвешивания большегрузных объектов | 1991 |
|
SU1774189A1 |
| Весовое устройство | 1989 |
|
SU1770767A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ, ЗАЩИЩЕННЫЕ ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ ТРАНСПОРТИРУЕМОГО ГРУЗА | 2003 |
|
RU2247335C1 |
| Бесфундаментные переносные весы | 1989 |
|
SU1719918A1 |
| Весовое устройство с зафиксированной грузоприемной платформой | 2023 |
|
RU2815856C1 |
| Платформенные рычажные весы | 1984 |
|
SU1339634A1 |
| Весы | 1979 |
|
SU1035428A1 |
| Устройство для взвешивания заготовок в потоке | 1990 |
|
SU1770768A1 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |
Использование: взвешивание автомобилей в движении. Сущность изобретения: грузоприемная платформа 1 опирается на силоизмерительные датчики 4 через опоры 5. Между силоиэмерительными датчиками и основанием 2 размещены установочные узлы. Каждый установочный узел выполнен в виде клиновой пары, размещенной на сферической опоре 16, выполненной с регулятором ее углового положения. Верхний клин 15 клиновой пары снабжен фиксирующим винтом 21 и установлен с возможностью вертикального перемещения. Нижний клин 14 снабжен регулировочным винтом 20 и установлен с возможностью горизонтального перемещения. Узел поперечной стабили: зации грузоприемной платформы выполнен в виде попарно установленных перпендикулярно продольной оси и симметрично относительно поперечной оси грузоприемной платформы натяжных струнок. Узел продольной стабилизации грузоприемной плат- формы выполнен в виде попарно установленных симметрично относительно ее продольной оси дополнительных натяжных струнок. 6 ил.
Фич. г
Фие.З
Составитель А.Казанцев Редактор Т .Мельникова Техред М.Моргентая
Корректор Н.Гунько
| Гроссман-Н.Я | |||
| и др | |||
| Автоматизированные системы взвешивания и дозирования,- М.: Машиностроение, 1988 | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ БОЛЬШЕГРУЗНЫХ ОБЪЕКТОВ | 0 |
|
SU394671A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
