Известны захваты для штучных грузов, преимущественно контейнеров, имеющие устройство для автоматического расцепления с грузом и приводное поворотное устройство, установленное на обойме грузового полиспаста крана. Однако в таких захватах затруднено питание электродвигателя поворотного устройства током.
В описываемом захвате указанный недостаток устранен тем, что, с целью питания электрическим током электродвигателя поворотного устройства с помощью гибкого кабеля, последний прикреплен к поддержкам, свободно охватывающим канаты неподвижной ветви грузового полиспаста, а обойма грузового полиспаста выполнена с ловителем для фиксации положения поддержек при подъеме захвата.
С целью применения захвата для грузов различных размеров жесткие тяги, удерживающие захватные крючья, выполнены телескопическими и снабжены подпружиненными защелками для автоматической фиксации их в раздвинутом положении.
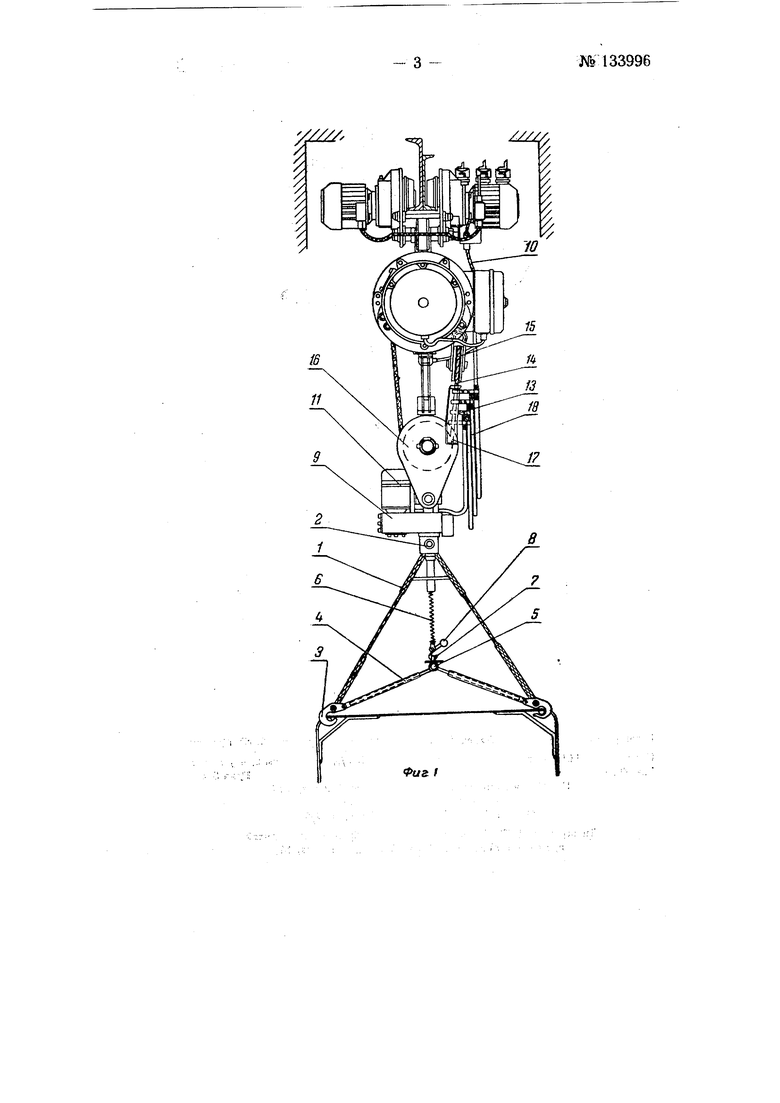
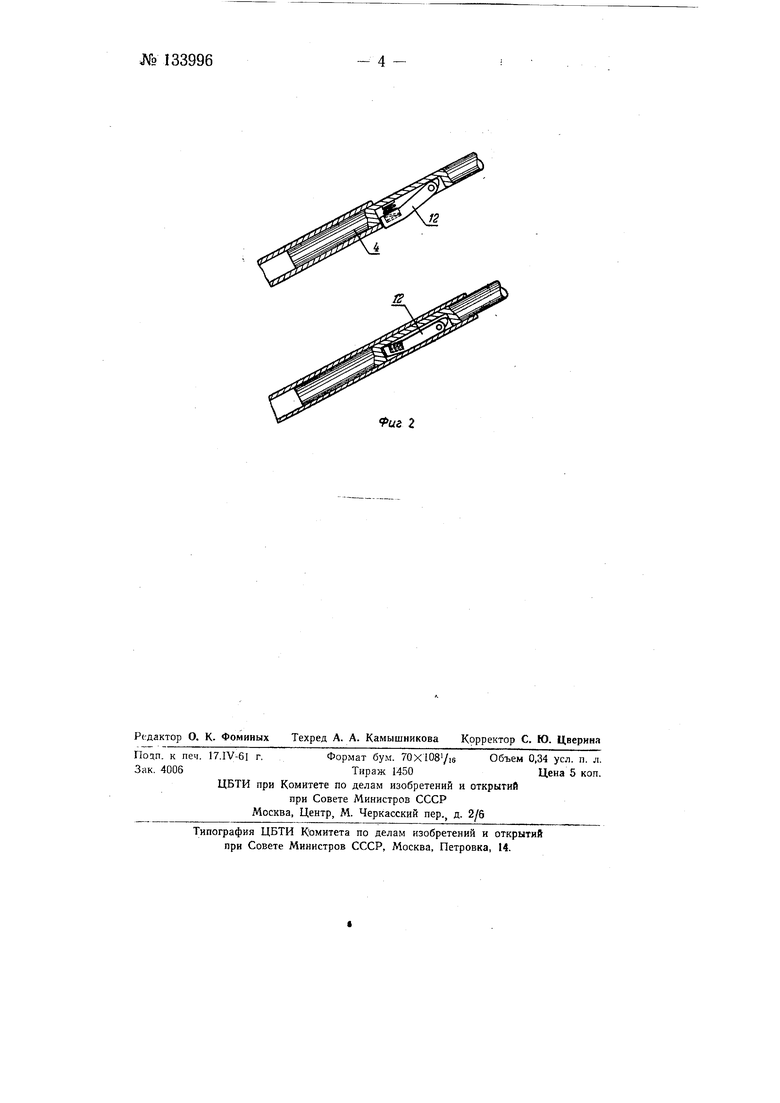
На фиг. 1 изображен захват для щтучных грузов; на фиг- 2 - подпружиненная защелка в открытом и закрытом положениях.
Захват для штучных грузов состоит из четырх гибких тяг /, прикрепленных к грузоподъемной серьге 2 и снабженных захватными крючьями 3, жестких тяг 4, щарнирно соединенных с траверсой 5, подвещенной к серьге 2 с помощью пружины б и крюка 7 с противовесом 8, а также приводного поворотного устройства 9 с кабелем 10, подводящим электрический ток к электродвигателю 11.
При ослаблении гибких тяг 1, происходящем при установке контейнера на место, крюк 7 под воздействием противовеса 8 поворачивается и расцепляется с траверсой 5, после чего захватные крючья 3 выходят из зацепления с захватными приборами контейнера. Тяги 4 выполнены телескопическими и снабжены подпружиненными защелками 2 (фиг. 2) для автоматической фиксации тяг 4 в раздвинутом положении. Благодаря этому захват можно применять для разгрузки кон№ 133996- 2 тейнеров различных размеров, ибо всегда выдерживается минимальный зазор, необходимый для отцепки контейнера.
Кабель 10, питающий током электродвигатель //, прикреплен к поддержкам 13, свободно охватывающим неподвижную ветвь 14 грузового полиспаста 15, па обойме 16 которого установлен ловитель 17 для фиксации положения поддержек 13 при подъеме захвата. Благодаря такому устройству кабель 10 укладывается в правильные петли 18, чем полностью исключается его перекручивание и повреждение.
Предмет изобретения
1.Захват для штучных грузов, преимущественно контейнеров, состоящий из гибких тяг, прикрепленных к грузоподъемной серьге крана и снабженных захватными крючьями, удерживаемыми в определенном положении жесткими тягами, шарнирно соединенными с траверсой, подвещенной к грузоподъемной скобе с помощью пружины с крюком, несущим противовес, выводящий крюк из зацепления с траверсой при ослаблении гибких тяг, и приводного поворотного устройства, установленного на обойме грузового полиспаста крана, отличающийся тем, что, с целью питания электрическим током электродвигателя поворотного устройства с помощью гибкого кабеля, последний прикреплен к поддержкам, свободно охватывающим канаты неподвижной ветви грузового полиспаста, а обойма грузового полиспаста выполнена с ловителем для фиксации положения поддержке при подъеме захвата2.Захват по п. 1, отличающийся тем, что, с целью применения его для грузов различных размеров, жесткие тяги, удерживающие захватные крючья, выполнены телескопическими и снабжены подпружиненными защелками для автоматической фиксации их в раздвинутом положении.
y/Z.
2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для подъема контейнеров | 1957 |
|
SU113379A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Захват для контейнеров | 1980 |
|
SU956410A1 |
| Захват для застропки и отстропки контейнеров | 1961 |
|
SU151790A1 |
| Грузозахватное устройство | 1990 |
|
SU1801921A1 |
| Перегрузочное устройство, преимущественно, для поточных линий | 1960 |
|
SU135405A1 |
| Захват-кантователь для контейнеров с цапфами | 1982 |
|
SU1066934A1 |
| ТРАВЕРСА | 2002 |
|
RU2225826C1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |