I
Изобретение относится к грузозахва-рным устройствам, преимущественно I для контейнере, снабженных цапфами, конструктивно приспособленнь м для испопь эования с крановыми приспособленнями.
Известны крановь захваты-кантователи ковшей со штучным грузом, содержащие траверсу с серьгой для навески на крюк грузоподъемного механизма систему гидроуправления, жестко соединенные с каннами траверсы две тяги, несущие привод поворота, на осях свободных концов которых установлены механизмы захвата 1 .
Недостатком таких захватоБ-кантоват&лей является сложность конструкции, отсутствие возможности обеспечить автоматическое и точное наведение механизма захвата на цапфы ковша и невозможность осуществить кантование ковша на угол больше 9О .
Наиболее близким из известных технических решений является крановый захват кантователь, преимущественно для контейнеров, снабженных цвп4вми, содержащий траверсу с серьгой для крепления поадерживающего каната грузоподъемной машины, на концах которой шарвирво установлены двуплечие захватные рычаги рдно плечо каждого из которых соединено с подвижной обоймой, которая посредством трособлочной системы связана с замыкающим канатом грузоподъемной машины, а на другом конце каждого двуплечего рь чага шарнирно устаиовлен поапружниенный ромбический лоштель с центральной ловушкой цапф контейнера f2|.
Недостатком такого захвата кантоват&ля является низкая прстзводитольность труда, из-за наличия ручных операций присоединения и отсоедннеиия крюка дополнительного каната, а также необходимость пребывания рабочего стропаля в опаской зоне работы грузоподъемной машины.
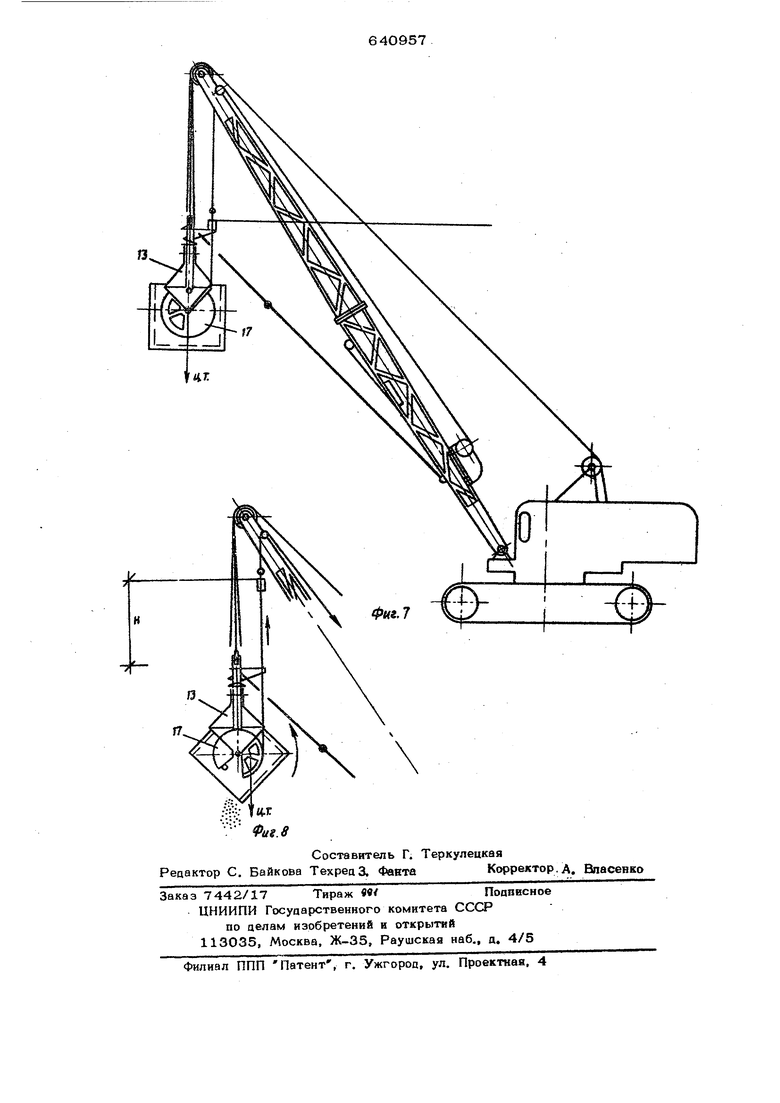
Цель изобретения - повышение производительности труда и безопасности по- грузо-разгрузочных работ путем автоматизации процесса кантования контейнеров. Указанная цепь достигается тем, что на каждом ловителе соосио горизонтально оси ловушки закреплены опоры с вертикальными прорезями, на которых с возможностью поворота относительно оси установлены блоки-кантователи с ромбическими вырезами и кольцевьгми канавками, при этом на. траверсе подвижно установлена балансирная подвеска, которая посредством канатов, уложенных в кольцевые канавки, соединена с блоками-кантователями. На фиг. 1 показан общий вид захвата} на фиг, 2 - то же, вия сбоку5 на фиг. 3 вид А на фиг, 1| па фиг. 4 - разрез Б-Б на фнг. 3| на тг, 5 - обший вид захвата в аксонометрии с освобожденными замыкающим |и дополнительным канатами} на фиг. 6 - то же, с выбранными замыкающими и дополнительным канатами и повернутыми блоками-кантователями на фиг. 7 - общий вид установки захвата на стреловом самоходном кране и положение вырезов блоков-кантователей при подъеме или опускании контейнера; на фиг. а - то же, при кантовании и разгрузке контейнера. Крановый захват-кантователь содержит траверсу 1 с серьгой 2 для крепления поддерживающего каната. На траверее установлены неподвижный блок З, упоры 4 и оси 5 для шарнирной подвески в ее крайних точках двуплечих захватных рычагов 6. Рычаги соединены между собой подвижной обоймой 7, в прорезях которой перемещаются пальцы 8, а внутри обоймы на оси 9 установлены два блока 10. Оба двуплечих захватных рычага соединены с траверсой регулируемь ми пружинами растяжения 11, Кроме то го, к двуплечим захватным рьтчагам иа осях 12 шарнирно подвешены ромбически ловители13, подпружиниванке которых выполнено посредством смонтированных на концах двуплечих захватных рычагов упоров 14 и компенсирующих пружин 15 Ромбические ловители цапф ко 1тейнера снабжены Центральными ловушками, на одной оси с которыми закреплены опоры 16, имеющие вертикальные вырезы под цапфы. На наружных цилиндрических поверхностях этих опор установлены с возможностью поворота вокруг горизонтальной оси блоки-кантователи 17, выполненные в виде имеющих дебаланс дисков, радиус которых больше максимал ного расстояния от центра поворота до центра тяжести разгружаемого контейнеpa, причем писки снабжены ромбическими вырезами, совпадающими по разм&рам и конфигурации с вырезами в нижней части ромбических ловителей, и кольцевыми канавками для укладки каната. На внутренних, обрашенных вниз сторонах металлоконструкнии ромбическ1С с ловителей устаноблены сменные изно- с©компексир5.тощие накладки 18, а опоры центральных ловушек снабжены менными вкладышами 19. Каждый блок-кантователь снабжен пальцем 20, проходящим через кольцевую канавку, В кольцевые канавки уложен канат 21, свободные концы которого закреплены на пальцах, а его замкнутая часть скреплена с балансирной подвеской и огибает два блока 22, установленные по краям балансирной подвески 3, свободно опирающейся на жестко связанные с траверсой кронштейны 24 и имеющей серьгу 25 для крепления дополнительного каната от лебедки стрелового крана. По обеим концам траверсы установлены пальцы 26 для крепления прк работе на стреловых кранах уздечки троса стабилизатора, Работа кранового захвата-кантователя осуществляется следующим образом. Захвати-канто-ватель, свободно подвешенный за серьгу 2 на поддерживающем канате грузоподъемной маашны, оборудованной двухбарабанной грейферной лебедкой, устанавливается над груженым контейнером с разведенными ромбическими ловителями 13. При этом разведение ромбических ловителей 13 ос тцествпяется автоматически за счет ослабления замьякаюшего каната, при котором подвижная обойма 7с блоками 10, опускается вниз, давая возможность регулируемым пружинам растяжения 11 повернуть двуплечие захватные рычаги 6 вокруг осей 5. При вь1бирании замыкающего каната, огибающего блоки 10 подвижной обоймы 7 и образующего с неподвижным блоком 3 траверсы 1 систему полиспаста, происходит подъем подвижной обоймы 7 и поворот связанньпс, с ней пальцами 8 двуплечих захватных рычагов 6 до их соприкосновения с упорами 4. При этом ромбические ловители 13 сводятся, охватывая боковые стенки контейнера, на KOTopuix установлены цапфы. Ударные нагрузки, воспринимаемые стенками контейнера при его захвате, снижают за счет подпружииивания ромбических ловителей 13 компенсирующими пружинами 15 сжатия. установленными между ромбическими-ло- вителями и упорами 14, смонтированными на концах двуплечих рычагов 6. Пр дальнейшем подъеме траверсы 1 цапфы контейнера (независимо от их расположения относительно ромбических ловителей ; 13 в пределах площади, ограниченной сто ронами ромба), скользя по компенсирующим накладкам 18, попадают в центральны ловушки и упираются в сменные вкладыши 19,установленные в опорах 16. После по цъема контейнера на требуемую высоту и установки его над местом разгрузки включается дополнительная лебедка, установлен ная на стреле грузоподъемной машины, которая начинает выбирать дополнительный канат, закрепленный за серьгу 25 балансирной подвески 23, Балансирная подвеска, свободно опирающаяся до этого на кронштейны 24, отделяются от них и в процессе дальнейшего подъема поворачивает с помощью каната 21 блоки кантователи 17 за счет того, что свободные концы каната крепятся к пальцам 20 проходящим через кольцевую канавку блоков-кантователей, а его замкнутая часть, с целью равномерного перераспределения усилий между блоками-кантователями огибает два блока 22, установленные по краям балансирной подвески 23 и скреплена с нею. В процессе поворота блоков-кантователей 17 края их ромбических вырезов входят в соприкосновение с шинами, установленными на боковых стенках контейнера, и дальнейший поворот блоковкантователей 17 происходит совместно i с поворотом контейнера на требуемый угол наклона. Величина требуемого угла наклона контейнера ограничивается длиной дуги кольцевых канавок блоков-кантовате лей и зависит от места установки пальцев 20,крепящих свободные концы каната 21 в кольцевых канавках. При ослаблении г.аната 21 после завершения процесса кантования и разгрузки контейнера, за счет имеющегося эксцентриситета центра тяжести контейнера по отношению к оси его поворота, блоки-кантователи повора-. чиваются в результате воздействия шипов контейнера на края их рамбических вырезов. В процессе поворота ослабленные концы каната 21 укладываются в кольцевые канавки блоков-кантователей, а балансирная подвеска 23 опускается до мо мента ее опирания на кронштейны 24. За счет имеющегося у блоков-кантователей цебаланса они возвращаются в исходное положение, натягивая свободные концы ка676 ната 21. Порожний контейнер устанавливается грузоподъемной машиной в требуемом месте я при последующем ослаблении поддерживающего каната захваткантователь опускается вниз по выхода цапф контейнера из центральных ловушек ромбических ловителей. После этого ослабляется замыкающий канат и оба ромбичеоких ловителя иод действием регулирую емых пружин растяжения 11 рвзво дятся в стороны, полностью освобождая порожний контейнер. Цикл разгрузки следующих груженых контейнеров повторяется описанным выше образом. Закрепление на каждом ромбическом ловителе соосно горизонтальной оси центральной ловушки опоры с вертикальными прорезями, на которых с возможностью поворота относительно оси установлены блоки-кантователи с ромбическими вырезами и кольцввьиии канавками, а также подвижная установка на траверсе баланскрной подвески, которая посредством канатов, уложенных в кольцевые канавка, соединена с блоками-кантователями позволяет повь сйть производительность труда и безопасность погрузочно-разгрузочных работ путем автоматизации процесса кантования контейнеров, исключав тем самым необхо- оимость участия в этом процессе рабочего-стропаля. Формула изобретения . Крановый захват-кантователь, преимущественно аля контейнеров, снабженных цапфами, содержащий траверсу с серьгой для крепления поддерживающего каната грузоподъемной машины, на концах которой шарнирно . установлены двуплечие захватные рьяаги, одно йлечо ка ад1ого из которых соединено с подвижной обоймой которая посредством трособлочной системы связана с замыкающим канатом грузоподъемной машины, а на другом конце каждого двуплечего рычага шврнирно установлен подпружиненный ромбический ловитель с центральной ловушкой для цапф койтей нера, отличающийся тем, что, с целью повышения пронзвоаительности труаа и безопазиости пагруэо- . разгрузочных работ путем автоматизации процесса кантования контейнеров, на каждом ловителе соосно горизонтальной оси ловушки закреплены опоры с вертикальными прорезями, на которых с возможностью поворота относительно оси установлены бпоки-кантователи с ромбическими вырезами и кольцевыми канавка- ми, при этом на траверсе поцвнжнб уств764О95йовлена балансирная подвеска, которая посреаством канатов, уложенных в кольцевые кановки, соединена с блоками-кантователями. Источники информации, гфинятые во внанание при экспертизе; 5 7 1.Авторское свицетельсвтво СССР М 217623, кл. 35 в 6/13, 1968. 2.Демидов Д.,В. Работа коллективов транспортных цехов торфопредприятий Ижевского треста; Торфяная промышленность, 1974, , № 10, с. 20-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крановый захват-кантователь | 1976 |
|
SU704883A1 |
| Крановый захват-кантователь | 1978 |
|
SU779270A1 |
| Крановый захват-кантователь | 1984 |
|
SU1240722A1 |
| Захват-кантователь для контейнеров с цапфами | 1982 |
|
SU1066934A1 |
| Крановый захват-кантователь | 1986 |
|
SU1386536A1 |
| Захват-кантователь для контейнеров с цапфами на боковых стенках | 1986 |
|
SU1379232A1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |
| Захват-кантователь | 1986 |
|
SU1341153A1 |
| Захват-кантователь для контейнеров с цапфами | 1989 |
|
SU1664720A1 |
| Захват-кантователь | 1986 |
|
SU1310325A1 |

-г
jLil.
№
га
ff
ФиеЛ
№
a
tfnt.f
