Изобретение относится к грузоподъемным устройствам, перемещающимся по наклонным подвесным направляющим, например монорельсам.
Цель изобретения - повышение безопасности работы грузоподъемного устройства на наклонных участках пути.
На фиг.1 показано грузоподъемное устройство со схемой включения датчиков коммутации электрических,цепей в цепь управления привода передвижения, общий вид; на фиг.2 - to же, вид сверху; на фиг.З - то же, вариант выполнения.
Грузоподъемное устройство содержит грузоподъемный механизм 1, ходовую тележку 2, механизм передвижения, включающий барабан 3, вращаемый приводом 4 передвижения, и тормоз 5 барабана 3, срабатывающий при отключении привода 4 передвижения. На барабане 3 запасованы два каната 6, образующие на нем витки трения. Концы канатов 6 прикреплены к пружинным амортизаторам 7, состоящим из кронщ- тейнов 8, закрепленных на направляющей 9, натяжных винтов 10, пружин 11. На направляющей 9 установлены датчики коммутации электрических цепей 12 - 15, предназначенные для контроля обрыва канатов. Датчики 12 - 15 включаются в цепь управления привода 4 передвижения по параллельно-последовательной схеме 16.
Устройство работает следующим образом.
Передвижение устройства происходит за счет взаимодействия вращаемого приводом 4 передвижения барабана 3 с запасованными на нем канатами 6. При вращении барабана 3 в указанном на фиг.2 направлении усилия натяжения в набегающих на барабан 3 ветвях канатов 6 обеспечивают втягивания натяжных винтов 10 в кронштейны 8, пре- одолевания усилия пружин 11. При этом датчики 12 и 13 не размыкают цепь управления привода 4 передвижения, так как натяжные винты 10 не взаимодействуют с ними. Усилия натяжения в сбегающих с барабана 3 ветвях канатов 6 недостаточны для преодоления усилия пружин 11, поэтому датчики 14 и 15, с которыми взаимодействуют натяжные винты 10, размькают цепь упра0
В
0
5
0
5
0
5
0
5
вления привода 4 передвижения. Включение датчиков 12 и 14, а также 13 и 15 в цепь управления привода 4 передвижения параллельно в пределах одного каната 6 и последовательно по отношению к датчикам другого каната 6 обеспечивает работу привода 4 передвижения при сохранении целостности обоих канатов 6.
Торможение устройства на направляющей 9 обеспечивается тормозом 5 барабана 3 при отключении привода 4 передвижения, которое осуществляется воздействием на элементы управления электрической цепью привода 4 передвижения принудительно или датчиками коммутации электрической цепи 12 и 14 или 13 и 15 при обрыве одного из канатов 6. При этом осуществляется взаимодействие заторможенного барабана 3 по крайней мере с одним из канатов 6. При обрьгае одного из канатов 6 натяжные винты 10 под действием пружин 11 взаимодействуют с двумя датчиками 12 и 14 или 13 и 15, соединенными параллельно в пределах одного каната 6, которые размыкают цепь управления привода 4 передвижения, что приводит к отключению привода 4 передвижения.
Формула изобретения
Грузоподъемное устройство, содержащее установленную на направляющих ходовую тележку с грузоподъемным механизмом и связанным с цепью управления механизмом передвижения с канатом, запасованным на приводном барабане и снабженным на концах пружинными амортизаторами, отличающееся тем, что, с целью повьш1ения безопасности работы на наклонньк участках пути, оно снабжено дополнительным канатом, запасованным на указанном барабане, и тормозом барабана, а на направляющей установлены датчики, взаимодействующие с пружинными амортизаторами и включенные в цепь управления механизмом передвижения, причем датчики, взаимодействующие с амортизаторами одного каната, соединены между собой параллельно, а датчики, взаимодействующие с амортизаторами другого каната, - последовательно.
/« to
ч
7/
/2
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| БЕЗОПАСНЫЙ КАНАТНЫЙ ПОЛИСПАСТ | 2004 |
|
RU2266860C1 |
| Грузоподъемное устройство | 1986 |
|
SU1414682A1 |
| Кабельный кран | 1986 |
|
SU1632925A1 |
| Грузовая тележка для крана мостового типа | 1975 |
|
SU517554A1 |
| ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА С КАНАТНОЙ ТЯГОЙ | 2005 |
|
RU2288163C1 |
| НАТЯЖНОЕ УСТРОЙСТВО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2002 |
|
RU2214355C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
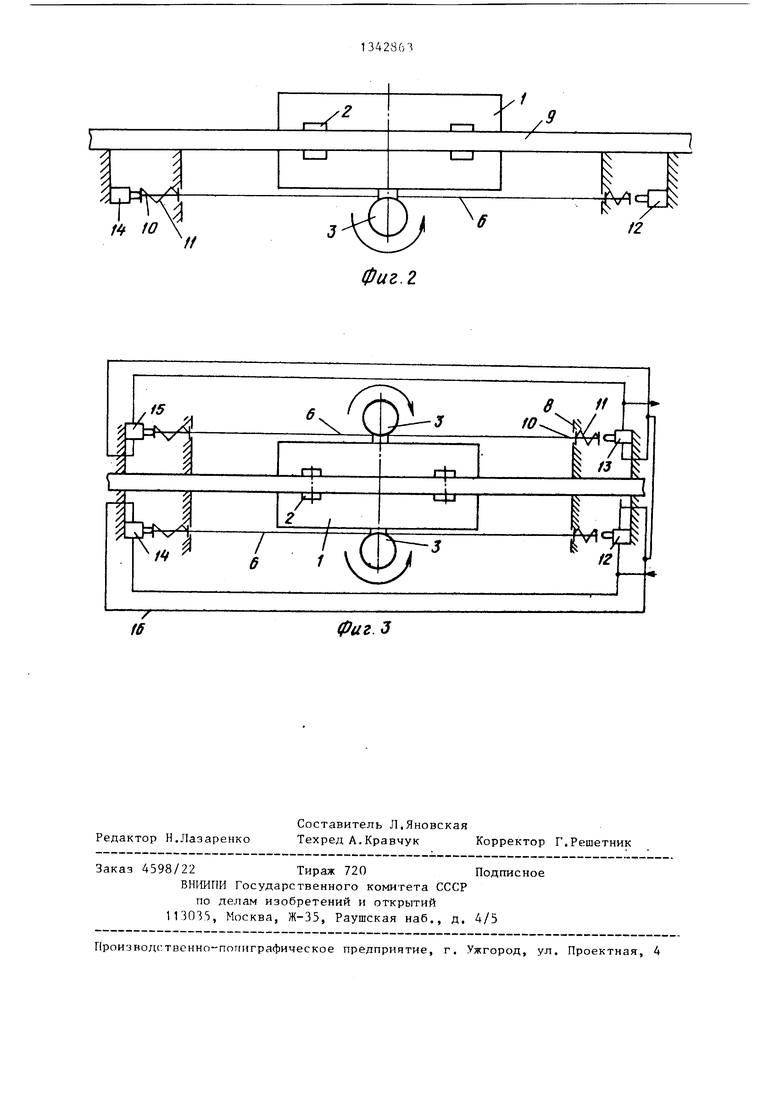
Изобретение относится к грузоподъемным устройствам. Цель изобретения - повьшение безопасности работы на наклонных участках пути. Устройство содержит ходовую тележку 2 с грузоподъемным механизмом 1 и механизмом передвижения. Механизм передвижения содержит барабан 3, вращаемый от привода 4, На барабане 3 запа- сованы канаты 6, к концам которых прикреплены пружинные амортизаторы 7. Имеется тормоз 5 барабана 3. На направляющей 9 установлены датчики 12 - 15, взаимодействующие с пружинными амортизаторами 7 и включенные в цепь управления механизмом передвижения. Датчики 12 и 14, а также 13 и 15 соединены между собой параллельно, а 12 и 13 и 14 и 15 - последовательно. 3 ил.
±
-сП7Ф
Л
фаг.З
Редактор Н.Лазаренко
Составитель Л.Яновская
Техред А.Кравчук Корректор Г.Решетник
Заказ 4598/22Тираж 720Подписное
ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, А/5
Производг-твенно-поггиграфическое предприятие, г. Ужгород, ул. Проектная, А
| 0 |
|
SU246809A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
