18асо
ГС
х ю сп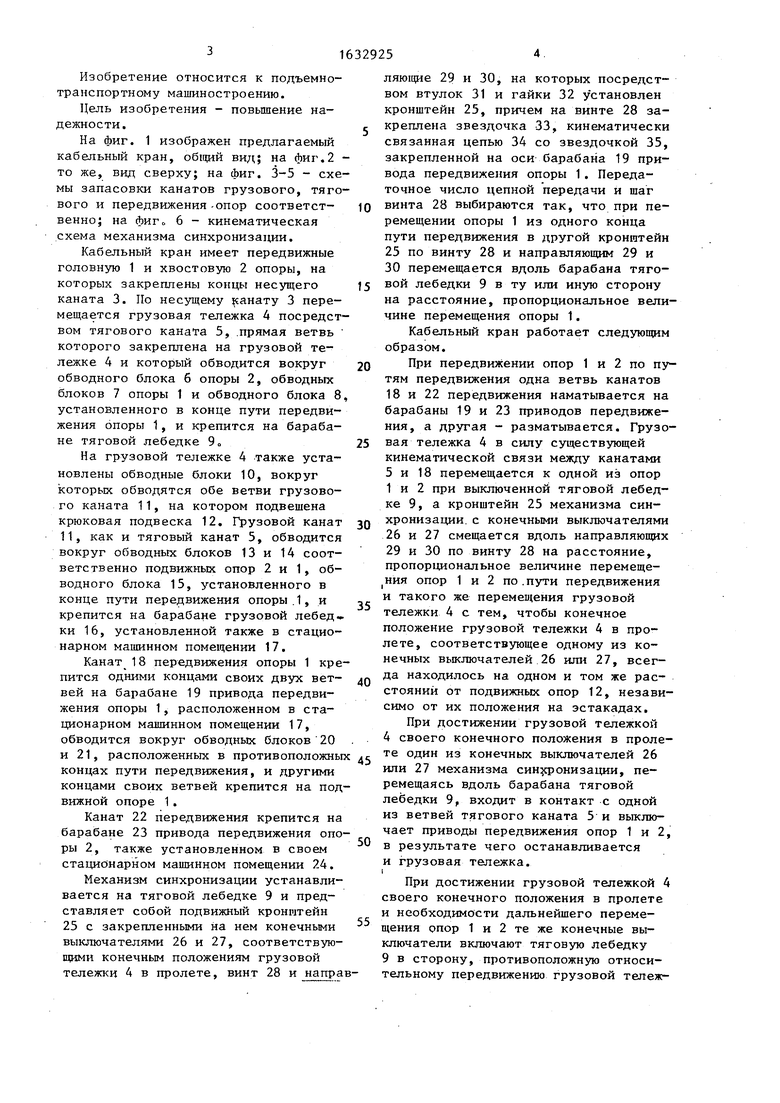
| название | год | авторы | номер документа |
|---|---|---|---|
| Кабельный кран | 1988 |
|
SU1558855A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |
| Кабельный кран | 1988 |
|
SU1557080A1 |
| Подвесная канатная дорога маятникового типа | 1978 |
|
SU749716A1 |
| Привод грузовой тележки крана мосто-ВОгО ТипА | 1979 |
|
SU816938A1 |
| Подвесная канатная дорога маятникового типа | 1982 |
|
SU1165604A1 |
| Устройство для подъема тяжеловесных грузов | 1989 |
|
SU1708749A1 |
| Кабельный кран | 1989 |
|
SU1768495A1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение надежности. При передвижении опор по путям1передвижения одна ветвь канатов 18 и 22 передвижения наматывается на барабаны 19 и 23, а другая - разматывается. Грузовая тележка перемещается к одной из опор при выключенной лебедке 9, а кронштейн механизма синхронизации с конечными выключателями смещается вдоль направляющих на расстояние, пропорциональное величине перемещения опор и такого же перемещения тележки с тем, чтобы конечное положение тележки в пролете, соответствующее одному из конечных выключателей, всегда находилось на одном и том же расстоянии от подвижных опор независимо от их положения на эстакадах. 6 ил. i (Л
9 16
Фаг. 2
Изобретение относится к подъемно- транспортному машиностроению.
Цель изобретения - повышение надежности,г
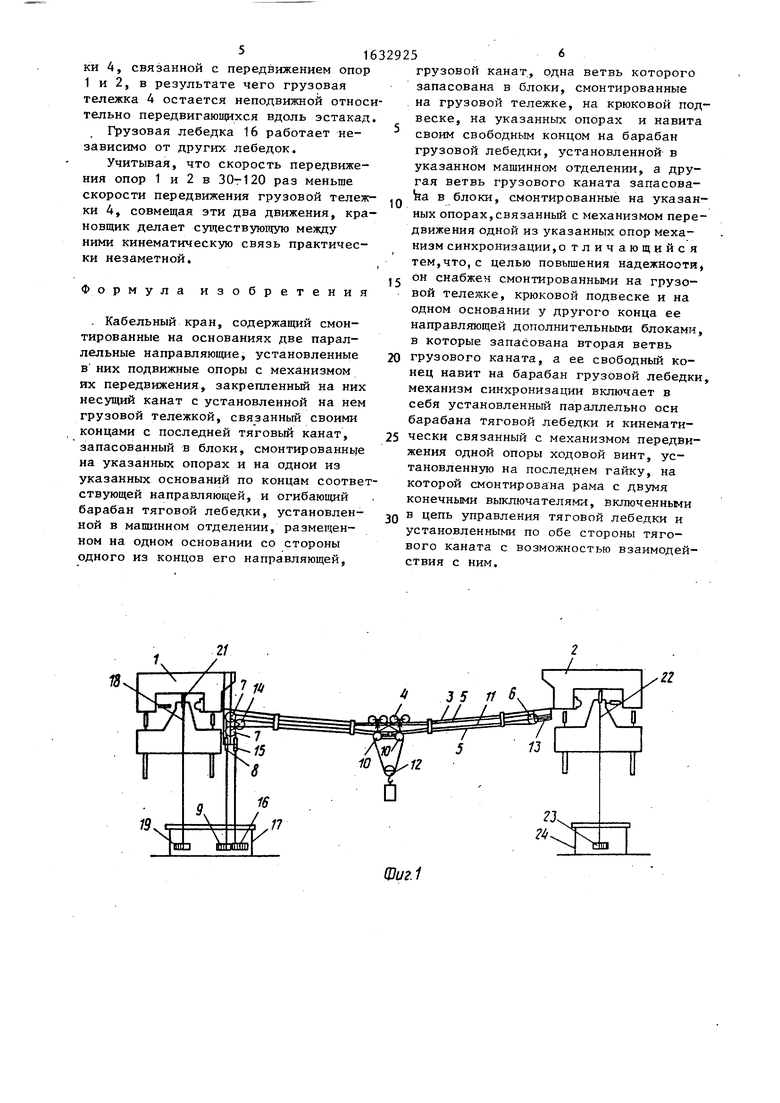
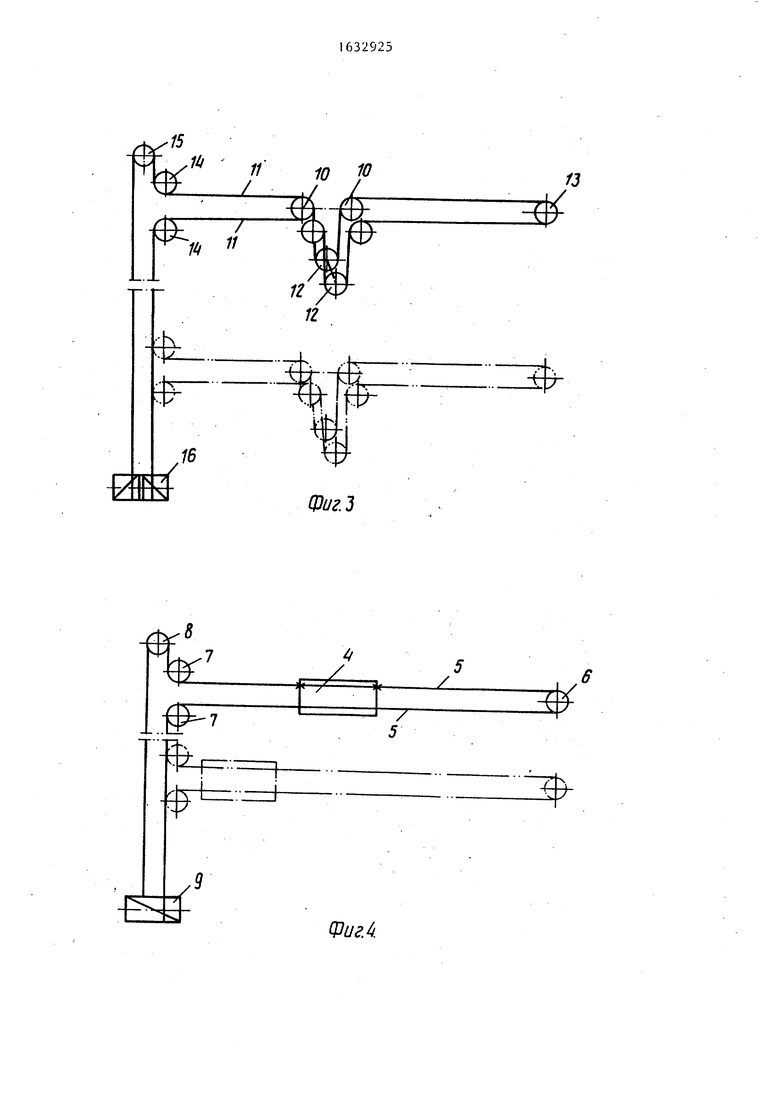
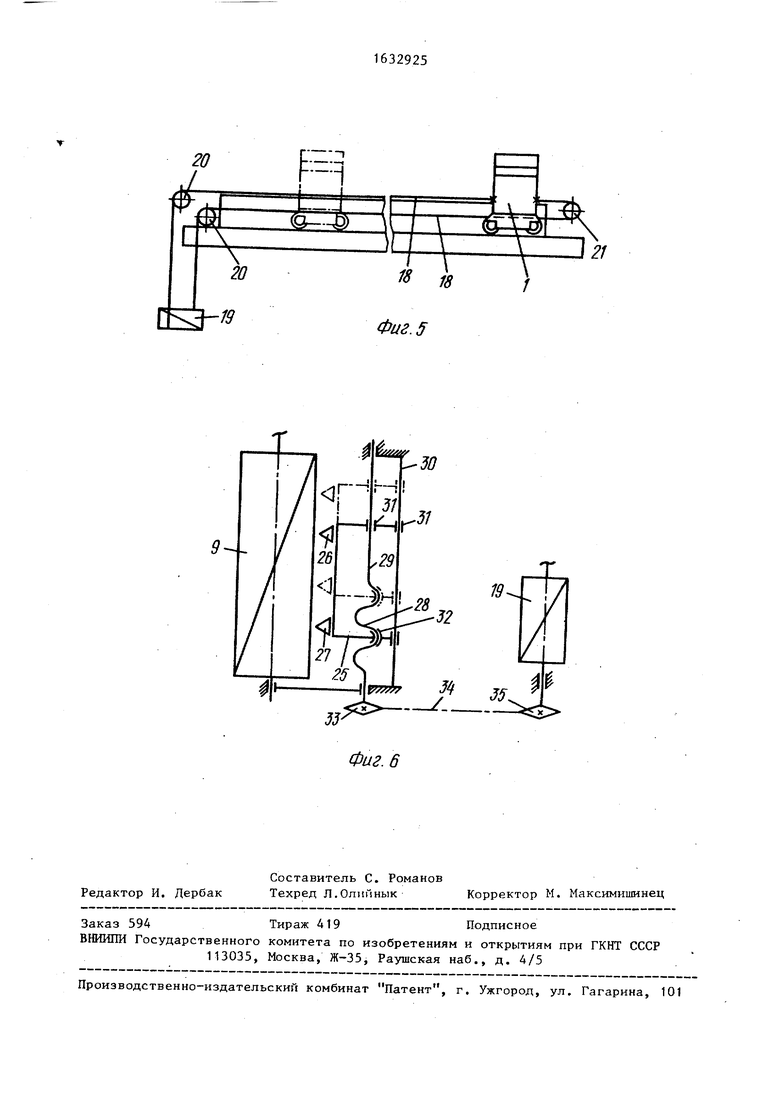
На фиг. 1 изображен предлагаемый кабельный кран, общий вид; на фиг.2 - то же, вид сверху; на фиг. 3-5 - схемы запасовки канатов грузового, тягового и передвижения -опор соответст- ю венно; на фиг„ 6 - кинематическая схема механизма синхронизации.
Кабельный кран имеет передвижные головную 1 и хвостовую 2 опоры, на которых закреплены концы несущего 15 каната 3. Но несущему анату 3 перемещается грузовая тележка 4 посредством тягового каната 5, прямая ветвь которого закреплена на грузовой тележке 4 и который обводится вокруг 20 обводного блока б опоры 2, обводных блоков 7 опоры 1 и обводного блока 8, установленного в конце пути передвижения опоры 1, и крепится на барабане тяговой лебедке 9„25
На грузовой тележке 4 также установлены обводные блоки 10, вокруг которых обводятся обе ветви грузового каната 11, на котором подвешена крюковая подвеска 12. Грузовой канат 30 11, как и тяговый канат 5, обводится вокруг обводных блоков 13 и 14 соответственно подвижных опор 2 и 1, обводного блока 15, установленного в конце пути передвижения опоры. 1, и 35 крепится на барабане грузовой лебед ки 16, установленной также в стационарном машинном помещении 17.
Канат 18 передвижения опоры 1 крепится одними концами своих двух вет- дд вей на барабане 19 привода передвижения опоры 1, расположенном в стационарном машинном помещении 17, обводится вокруг обводных блоков 20
ляющие 29 и 30, на которых посредством втулок 31 и гайки 32 установлен кронштейн 25, причем на винте 28 закреплена звездочка 33, кинематически связанная цепью 34 со звездочкой 35, закрепленной на оси барабана 19 привода передвижения опоры 1. Передаточное число цепной передачи и шаг винта 28 выбираются так, что при перемещении опоры 1 из одного конца пути передвижения в другой кронштейн
25по винту 28 и направляющим 29 и 30 перемещается вдоль барабана тяговой лебедки 9 в ту или иную сторону на расстояние, пропорциональное вели чине перемещения опоры 1.
Кабельный кран работает следующим образом.
При передвижении опор 1 и 2 по пу тям передвижения одна ветвь канатов 18 и 22 передвижения наматывается на барабаны 19 и 23 приводов передвижения, а другая - разматывается. Грузо вая тележка 4 в силу существующей кинематической связи между канатами 5 и 18 перемещается к одной из опор 1 и 2 при выключенной тяговой лебедке 9, а кронштейн 25 механизма синхронизации с конечными выключателями
26и 27 смещается вдоль направляющих 29 и 30 по винту 28 на расстояние, пропорциональное величине перемеще ия опор 1 и 2 по.пути передвижения и такого же перемещения грузовой тележки 4 с тем, чтобы конечное положение грузовой тележки 4 в пролете, соответствующее одному из конечных выключателей 26 или 27, всегда находилось на одном и том же расстояний от подвижных опор 12, незави симо от их положения на эстакадах.
При достижении грузовой тележкой 4 своего конечного положения в проле
26
и 21, расположенных в противоположных 45 те °ДИН из конечных выключателей
или 27 механизма синхронизации, пе-
концах пути передвижения, и другими концами своих ветвей крепится на подвижной опоре 1.
Канат 22 передвижения крепится на барабане 23 привода передвижения опоры 2, также установленном в своем стационарном машинном помещении 24.
Механизм синхронизации устанавливается на тяговой лебедке 9 и представляет собой подвижный кронштейн 25 с закрепленными на нем конечными выключателями 26 и 27, соответствующими конечным положениям грузовой тележки 4 в пролете, винт 28 и направ50
55
ремещаясь вдоль барабана тяговой лебедки 9, входит в контакт с одной из ветвей тягового каната 5 и выключает приводы передвижения опор 1 и 2 в результате чего останавливается
и грузовая тележка.
i
При достижении грузовой тележкой своего конечного положения в пролете и необходимости дальнейшего перемещения опор 1 и 2 те же конечные выключатели включают тяговую лебедку 9 в сторону, противоположную относительному передвижению грузовой тележ
ляющие 29 и 30, на которых посредством втулок 31 и гайки 32 установлен кронштейн 25, причем на винте 28 закреплена звездочка 33, кинематически связанная цепью 34 со звездочкой 35, закрепленной на оси барабана 19 привода передвижения опоры 1. Передаточное число цепной передачи и шаг винта 28 выбираются так, что при перемещении опоры 1 из одного конца пути передвижения в другой кронштейн
25по винту 28 и направляющим 29 и 30 перемещается вдоль барабана тяговой лебедки 9 в ту или иную сторону на расстояние, пропорциональное величине перемещения опоры 1.
Кабельный кран работает следующим образом.
При передвижении опор 1 и 2 по путям передвижения одна ветвь канатов 18 и 22 передвижения наматывается на барабаны 19 и 23 приводов передвижения, а другая - разматывается. Грузовая тележка 4 в силу существующей кинематической связи между канатами 5 и 18 перемещается к одной из опор 1 и 2 при выключенной тяговой лебедке 9, а кронштейн 25 механизма синхронизации с конечными выключателями
26и 27 смещается вдоль направляющих 29 и 30 по винту 28 на расстояние, пропорциональное величине перемеще ия опор 1 и 2 по.пути передвижения и такого же перемещения грузовой тележки 4 с тем, чтобы конечное положение грузовой тележки 4 в пролете, соответствующее одному из конечных выключателей 26 или 27, всегда находилось на одном и том же расстояний от подвижных опор 12, независимо от их положения на эстакадах.
При достижении грузовой тележкой 4 своего конечного положения в проле26
те °ДИН из конечных выключателей
0
5
ремещаясь вдоль барабана тяговой лебедки 9, входит в контакт с одной из ветвей тягового каната 5 и выключает приводы передвижения опор 1 и 2, в результате чего останавливается
и грузовая тележка.
i
При достижении грузовой тележкой 4 своего конечного положения в пролете и необходимости дальнейшего перемещения опор 1 и 2 те же конечные выключатели включают тяговую лебедку 9 в сторону, противоположную относительному передвижению грузовой тележки 4, связанной с передвижением опор 1 и 2, в результате чего грузовая тележка 4 остается неподвижной отностельно передвигающихся вдоль эстакад
Грузовая лебедка 16 работает независимо от других лебедок.
Учитывая, что скорость передвижения опор 1 и 2 в 30-120 раз меньше скорости передвижения грузовой тележки 4, совмещая эти два движения, крановщик делает существующую между ними кинематическую связь практически незаметной.
Формула изобретения
Кабельный кран, содержащий смонтированные на основаниях две параллельные направляющие, установленные в них подвижные опоры с механизмом их передвижения, закрепленный на них несущий канат с установленной на нем грузовой тележкой, связанный своими концами с последней тяговый канат, запасованный в блоки, смонтированные на указанных опорах и на одной из указанных оснований по концам соотвествующей направляющей, и огибающий барабан тяговой лебедки, установленной в машинном отделении, размещенном на одном основании со стороны одного из концов его направляющей,
0
грузовой канат, одна ветвь которого запасована в блоки, смонтированные на грузовой тележке, на крюковой подвеске, на указанных опорах и навита своим свободным концом на барабан грузовой лебедки, установленной в указанном машинном отделении, а другая ветвь грузового каната запасова- ka в блоки, смонтированные на указанных опорах,связанный с механизмом передвижения одной из указанных опор механизм синхронизации,о тличающийся тем,что, с целью повышения надежности,
с он снабжен смонтированными на грузовой тележке, крюковой подвеске и на одном основании у другого конца ее направляющей дополнительными блоками, в которые запасована вторая ветвь
0 грузового каната, а ее свободный конец навит на барабан грузовой лебедки, механизм синхронизации включает в себя установленный параллельно оси барабана тяговой лебедки и кинемати5 чески связанный с механизмом передвижения одной опоры ходовой винт, установленную на последнем гайку, на которой смонтирована рама с двумя конечными выключателями, включенными
о в цепь управления тяговой лебедки и установленными по обе стороны тягового каната с возможностью взаимодействия с ним.
Фиг.3
8
/
/
Фиг А
ГРЭ-
Фиг. 5
Ж
| Кабельный кран | 1973 |
|
SU507512A1 |
