Изобретение относится к средствам маневрирования подвижным составом и предназначено для перемещения железнодорожных вагонов на короткие расстояния для позиционирования их, например, при осуществлении мойки железнодорожных вагонов или проведения ремонта подвижного состава.
Известные методы маневрирования подвижного состава можно разделить на два класса. Первый - перемещение вагонов методом толкания их с помощью тележек или других средств, движущихся по основным рельсам. Второй - с помощью тянущих тележек, перемещаемых по дополнительным путям, проложенным внутри основного рельсового пути или вне его и снабженных механизмом жесткого контактирования с колесными парами вагонов или других экипажных единиц.
Известно устройство для перемещения железнодорожных вагонов, включающее тяговый барабан с приводом, тяговый канат и обводной блок, причем привод барабана оснащен тормозом, а тяговый канат выполнен в виде бесконечной ветви и снабжен устройством предварительного натяжения каната и захватом, расположенным на нижней ветви тягового каната (Патент РФ №29023, опубл. 27.04 2003 г.).
Недостатком известного устройства является низкая надежность натяжного каната, т.к. нет непосредственного контакта с колесной парой вагона и возможность передвижения вагона только в одну сторону.
Известно устройство для передвижения железнодорожных вагонов на короткие расстояния, содержащее расположенный вдоль колеи приводной тяговый орган с закрепленной к нему кареткой, на корпусе которой установлены опорные ролики, расположенные с возможностью опирания на направляющие, проложенные внутри колеи, и толкающий ролик для взаимодействия с элементами колесной пары. Корпус каретки выполнен в виде двуплечего балансира с центральным выступом, несущего по концам и на выступе соответственно опорные ролики и толкающий ролик. Ось балансира расположена от поверхности направляющих на расстоянии, большем радиуса опорных роликов и меньшем расстояния от поверхности направляющих до осей опорных роликов. Профили корпуса каретки в продольной вертикальной плоскости между опорными и толкающим роликами описаны кривыми с радиусом окружности, равным радиусу оси колесной пары (Патент РФ №2046046).
К недостаткам известного устройства относится невозможность перемещения единиц подвижного состава возвратно-поступательно с любой точки пути, а также отсутствие средств контроля и управления перемещением тележки.
Известна маневровая установка с тянущими тележками для колесных пар, предназначенная для маневрирования и позиционирования самодвижущих единиц подвижного состава типа «Сокол» на прямых и ровных участках пути через установку внешней мойки. Установка 2000/015 WESUMAT разработана германской фирмой «Vollerf GmBh» для российских железных дорог и нашла широкое применение в России. (Октябрьская ж.д. г.Санкт-Петербург, «Металлострой II» - Сокол», описание станции от.12.07.2000 г.).
Маневровая установка состоит из комбинированной приводной станции, узлов натяжения тягового каната, установки привода управляющего каната и сигнализации, конечных канатных роликов, направляющих канатных роликов, тянущей тележки для колесных пар, тягового и управляющего канатов, а также систему управления, включающую электронное и электрическое оборудование (двигатели, муфты, редукторы, концевые выключатели). Маневровый ход во время процесса мойки происходит автоматически. Концевые маневровые выключатели с обеих сторон маневрового пути ограничивают ход тянущей тележки вперед и назад. После того, как тянущая тележка дошла до одного из этих выключателей, она может двигаться только в обратную сторону. Тянущая тележка колесной пары свободно передвигается между рельсами нормальной колеи по отдельно проложенным вспомогательным рельсам. Тележка прикреплена с обеих сторон к бесконечному (замкнутому) реверсивному тяговому канату. При помощи четырех подпружиненных пар тяговых роликов тянущая тележка двигает или тормозит вагоны за реборды колесных пар, при этом тормоза всех передвигаемых вагонов должны быть и оставаться во время маневровых работ отпущенными. Для того, чтобы в любом положении на маневровом пути приводить тяговые ролики в рабочее или нерабочее положение, на тянущей тележке установлена управляющая кулиса. При помощи аксиальной канатной системы, приводимой в действие приводом управляющего каната, тяговые ролики выдавливаются наружу в рабочее положение посредством управляющей кулисы. Ход кулисы, соосный ходу рельс, составляет примерно 240 мм, ход тяговых роликов составляет около 65 мм. При втягивании тяговых роликов буферные пружины, установленные на тянущей тележке, ускоряют размотку управляющего каната с его привода.
Тянущая тележка для колесных пар состоит из базовой рамы, в которой установлены восемь поддерживающих колес (роликов), внутри рамы подвижно размещена регулируемая кулиса, связанная с пружиной; на регулируемой кулисе установлен арретир с ходовым роликом, зажимным шпинделем и буферной пружиной; на базовой раме установлено четыре отводных рычага, связанных подпружиненным рычажным механизмом с толкательными балками. Регулируемая кулиса управляется при помощи управляющего каната, проводимого через шкивы, установленные на кулисе и на базовой раме. На упорных балках находится по одной паре толкательных роликов (сдвоенные толкательные ролики), установленных на конических роликоподшипниках. С другой стороны находятся по одному ходовому ролику, приводимому в действие при передвижении кулисы. При подходе к реборде колеса тяговые ролики поднимаются в рабочее положение и фиксируются опорным рычагом. Вагон толкается или тормозится в пределах маневрового пути. Если вагон находится в требуемом положении, то тяговые ролики снова убираются. При этом опорные рычаги деблокируются и ролики снова падают в горизонтальное положение. Перед уборкой ходовой тормоз слегка растормаживается, чтобы достичь более легкой уборки тяговых роликов, при помощи возможно налегающей реборды вагонного колеса. Перемещение тянущей тележки осуществляется одной лебедкой с реверсивным приводом, тормозом и тремя барабанами: одним общим (канатоведущим) и двумя другими для перемещения тележки вперед-назад. Этот привод аналогичен описанному в изобретении по авт. свид. №1439003.
Основные недостатки известного технического решения, выявленные при эксплуатации установки, заключаются в конструкции механизма, управляющего тяговыми роликами. Конструкция кулисы с массивным противовесом, управляемой дополнительным аксиальным канатом с помощью дополнительных шкивов, и узлов контроля натяжения троса посредством торсионной пружины, арретира с дополнительным ходовым роликом и зажимным устройством и т.п. является относительно сложной и не обеспечивает требуемой надежности при эксплуатации из-за трудности обеспечения натяжения канатов разного диаметра. Реверсивный привод лебедки с тремя барабанами усложняет надежность движения тележки в момент переключения направления ее движения и усложняет контроль за натяжением каната.
Наиболее близким техническим решением к заявляемому полезной модели является устройство для перемещения и позиционирования железнодорожных вагонов, защищенное патентом РФ №77838 и опубликованное 10.11.2008 г.
Известное устройство для перемещения железнодорожных вагонов содержит тянущую тележку с парами сдвоенных опорных роликов, которая свободно передвигается между рельсами нормальной колеи по отдельно проложенным вспомогательным рельсам, соединенную с двух сторон к тяговому канатному приводу, внутри рамы тянущей тележки размещен механизм, управляющий подпружиненными парами толкателей, жестко соединенных с отводными рычагами и сдвоенными тяговыми роликами, установленными с обеих сторон рамы тележки с возможностью сцепления с ребордой колесной пары железнодорожного вагона, причем механизм, управляющий тяговыми роликами, выполнен в виде балансиров, расположенных на передней и задней поверхности тележки, причем каждый из них попарно соединен друг с другом посредством вала, снабженного рычагами, которые переводят толкающие ролики из транспортного состояния в рабочее и обратно, датчики натяжения канатов, соединенные с системой управления и контроля за перемещением тянущей тележки и датчики положения колесной пары вагона, для контроля исходного положения колесной пары железнодорожного вагона.
Основным недостатком прототипа является относительная сложность конструкции, а также недостаточная надежность работы управляющего механизма при переводе тяговых роликов в рабочее положение для обеспечения контакта их с колесной парой железнодорожного вагона.
Технической задачей предлагаемого изобретения является устранение недостатков, присущих прототипу путем повышения эксплуатационной надежности работы устройства перемещения железнодорожных вагонов путем упрощения конструкции механизма, управляющего работой тяговых роликов, механизма натяжения и введения дополнительных датчиков в систему контроля.
Технический результат достигается за счет того, что в известное устройство для перемещения железнодорожных вагонов, содержащее тянущую тележку с парами сдвоенных опорных роликов, которая свободно передвигается между рельсами железнодорожной колеи по отдельно проложенным вспомогательным рельсам, вперед и назад посредством каната, через шкивы и механизм натяжения, соединенный с тяговым модулем, снабженным автономным электромеханическим приводом, внутри рамы тянущей тележки размещен механизм, управляющий парами тяговых (толкающих) роликов, установленных с обеих сторон рамы тележки с возможностью обеспечения сцепления с колесными парами вагонной тележки железнодорожного вагона, систему контроля за положением железнодорожного вагона и тянущей тележки, внесены изменения и дополнения, а именно:
- тянущая тележка выполнена из двух одинаковых консолей (частей) соединенных между собой упругим элементом (пружиной сжатия) и снабженных упорами ограничения их хода;
- механизм управляющий парами тяговых роликов, размещенный внутри рамы каждой консоли, выполнен в виде двухступенчатого шестеренчатого привода, причем первая ступень содержит рейку, контактирующую через прямозубую шестерню с косозубой шестерней, а вторая ступень - прямозубую шестерню, насаженную на вал с тяговыми роликами, также контактирующую с косозубой шестерней;
- в механизм управления дополнительно введен доводчик тяговых роликов до неподвижного упора, фиксирующего его рабочее положение, соединенный с рамой консоли и шестерней второй ступени;
- в механизм натяжения введен гидроцилиндр, регулирующий положение двуплечего рычага с грузами, обеспечивающими надежное натяжение каната;
- в систему контроля за положением тянущей тележки дополнительно введены два датчика: контроля положения тяговых роликов и положения тележки относительно колесной пары железнодорожного вагона.
Кроме того, реверсивный тяговый привод содержит четыре ряда наклонных шкивов, обеспечивающих угол обхвата барабанов канатом 720 градусов.
Выполнение тянущей тележки из двух частей (консолей) позволяет обеспечить контакт тяговых роликов с колесной парой железнодорожного вагона с двух сторон, что повышает надежность сцепления и исключает возможность перекоса движения вагона.
Предложенная конструкция выполнения механизма управления тяговыми роликами в виде двухступенчатого шестеренчатого привода значительно проще, чем у известного устройства, т.к. не содержит сложных конструктивных элементов, позволяет исключить массивные детали, что повышает надежность и облегчает эксплуатацию механизма.
Доводчик необходим для того, чтобы в момент выхода приводной рейки из зацепления довести рычаги с тяговыми роликами в конечное положение контакта с упорами и тем самым избежать поломки зубчатой передачи при выходе шестерни из зацепления.
Введение гидроцилиндра, управляющего наклоном двуплечего рычага, позволяет автоматизировать процесс натяжения каната и облегчить эксплуатацию работы механизма.
Конструкция устройства для перемещения железнодорожных вагонов представлена на фиг.1-7.
На фиг.1 представлена схема размещения основного оборудования, входящего в состав устройства на железнодорожном пути.
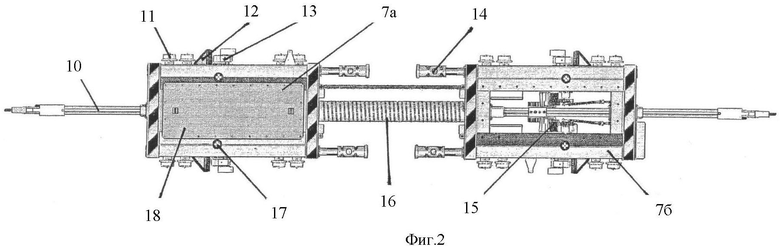
На фиг.2 показана конструкция тянущей тележки и механизм управления тяговыми роликами в исходном (начальном) положении.
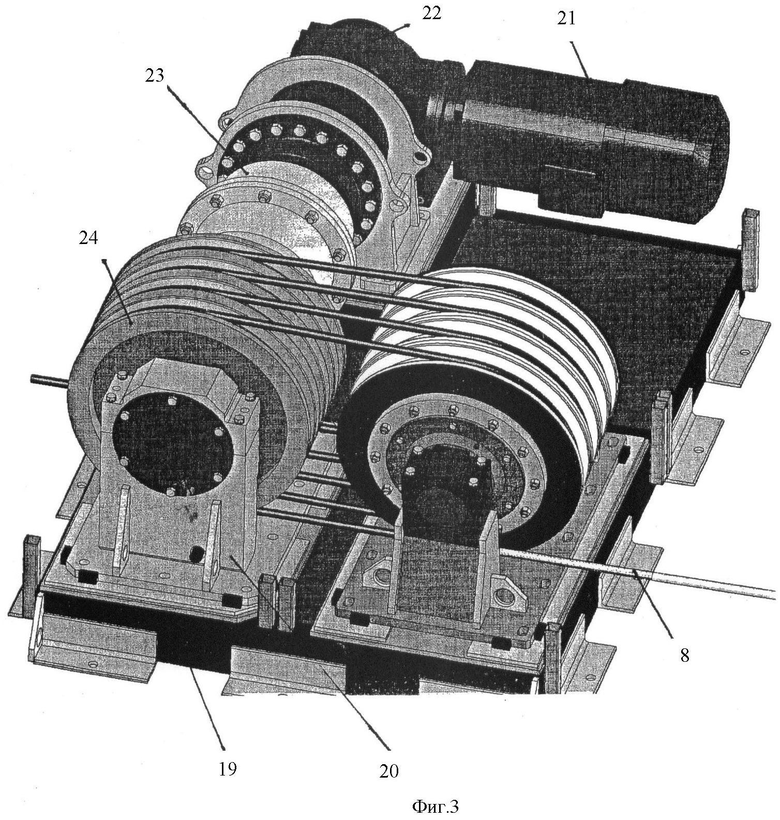
На фиг.3 приведена конструкция тягового модуля.
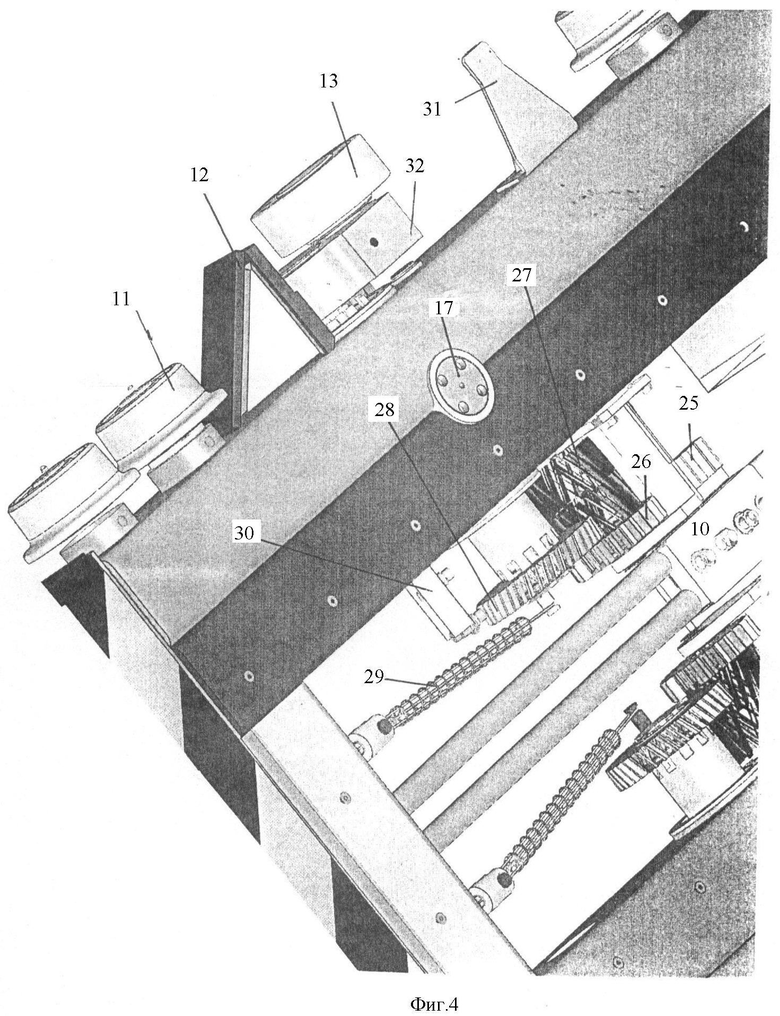
На фиг.4 приведена конструкция механизма управления тяговыми роликами, которые показаны в рабочем положении.
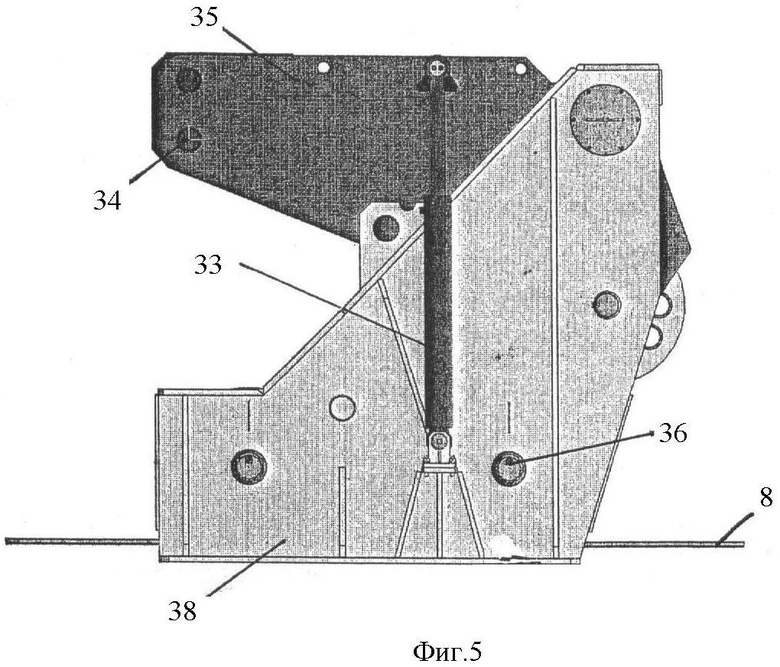
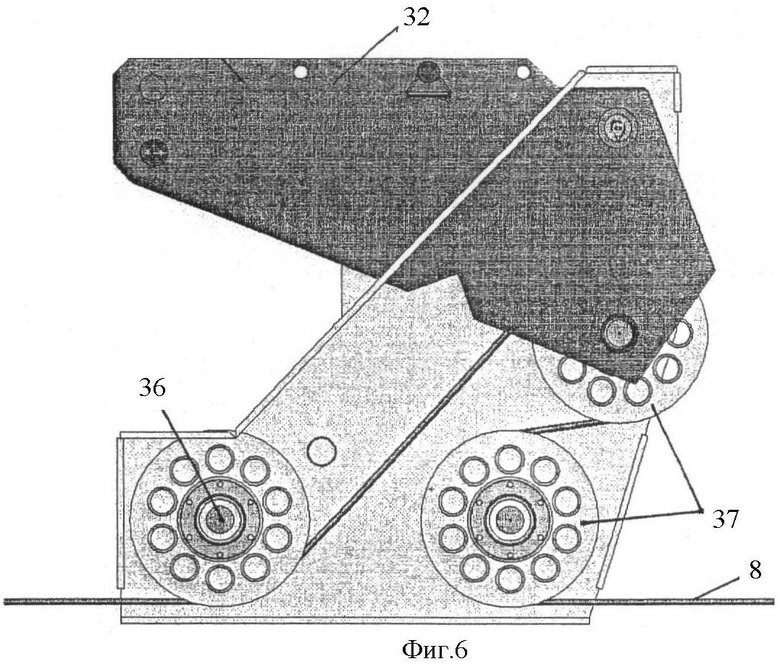
На фиг.5 изображена конструкция механизма натяжения каната, а на фиг.6 разрез, показывающий расположение шкивов для намотки каната.
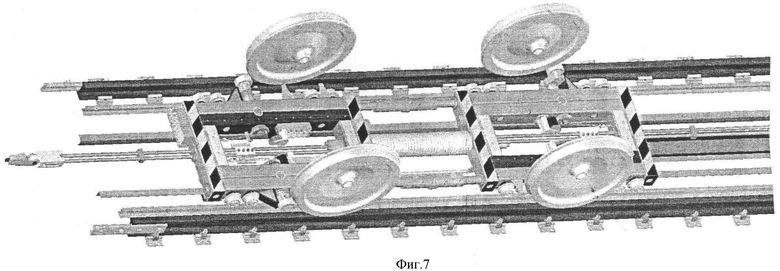
На фиг.7 показано рабочее положение тянущей тележки и колесной пары вагонной тележки железнодорожного вагона.
На фиг.1 показаны: основной железнодорожный путь 1 (для движения состава; вспомогательный путь 2 (для движения тянущей тележки); механизм натяжения каната 3, тяговый модуль 4, узел натяжения каната 5, шкивы 6, направляющие движение каната 8 вдоль вспомогательного пути, тянущая тележка 7, а также подставка 9 тягового каната. На фиг.1 условно показаны колесные пары вагонной тележки железнодорожного вагона.
На фиг.2 приведена конструкция тянущей тележки 7, которая состоит из двух одинаковых консолей (частей) 7 «а» и 7 «б». Рама каждой консоли через тягу 10 соединена с канатом 8. Боковые поверхности рамы каждой консоли оснащены сдвоенными опорными роликами 11, неподвижными упорами 12 и тяговыми роликами 13. На внутренних торцах каждой консоли расположены ограничители 14, а сами рамы соединены посредством упругого элемента 16, который представляет собой пружину сжатия. Внутри рамы каждой консоли размещен механизм управления 15 тяговыми роликами 13. На этой фигуре также показано: байонетное соединение 17 с валом тяговых роликов и крышка 18, предохраняющая механизм управления от попадания грязи.
Тяговый модуль 4, показанный на фиг.3, размещен на основании 19 и включает подщипниковый узел 20, для вала барабана 24 на шкивы которого наматывается канат 8. Модуль оснащен реверсивным электродвигателем 21 с редуктором 22, соединенный с валом барабана через систему муфт 23.
Механизм управления 15 тяговыми роликами 13 приведен на фиг.4 и выполнен в виде двухступенчатого шестеренчатого механического привода. Первая ступень включает зубчатую рейку 25 и прямозубую шестерню 26, а вторую ступень - косозубую шестерню 27 и насаженную на вал тяговых роликов, прямозубую шестерню 28. Доводчик 29, представляющий пружину, закрепленную к раме консоли и к шестерне 28. На фиг.4 также показаны тяга 10, приводящая в движение рейку 25, сдвоенные опорные ролики 11, неподвижный упор 12 и датчик 30 контроля положения тяговых роликов, датчик 31 контроля положения колесной пары вагонной тележки относительно тянущей тележки и контактная поверхность тягового ролика 32, соприкасающаяся с упором после доводки его в рабочее положение.
Механизм натяжения каната (фиг.5) включает гидроцилиндр 33, управляющий работой механизма натяжения, подвесы для груза 34, размещенные на двуплечем рычаге 35. На осях 36 расположены шкивы 37 (см. разрез - фиг.6), комбинация которых обеспечивает натяжение каната 8. Вся конструкция размещена на корпусе 38.
Фиг.7 в комментариях не нуждается, т.к. на ней показано рабочее положение тяговых роликов 13 относительно колес вагонной тележки 7.
Устройство для перемещения железнодорожных вагонов работает следующим образом (на примере мойки состава). Работа по перемещению состава во время мойки разбита на 6 (шесть) проходов, которые выполняются последовательно друг за другом. Каждый проход представляет процесс перемещения тележки, управляемый и контролируемый программой. Номер текущего прохода показывается оператору на мнемосхеме и экране системы управления при автоматическом режиме работы. При перемещении тележка может находиться в одном из двух состояний: рабочем или транспортном. Рабочее состояние - тележка передвигает состав. Транспортное состояние - тележка без соприкосновения с составом передвигается за очередной порцией вагонов под составом.
Состав подается на мойку таким образом, чтобы первый вагон находился над тянущей тележкой 7. В начальном состоянии тележки замкнут датчик начального положения тележки (ДНПТ), в конечном - замкнут датчик конечного положения тележки (ДКПТ). Если датчик замкнут, то на экране оператора мигает соответствующий ему значок.
Датчики системы контроля движения вагона в зоне мойки установлены на специальных стойках и на фиг.1 не показаны. После прибытия очередного состава на мойку оператор вводит режим работы: автоматический, тип состава, количество вагонов в составе и т.д. После подтверждения машинистом о готовности состава к мойке, оператор нажимает соответствующую клавишу и начинается выполнение первого прохода.
Перед началом каждого прохода производится проверка на возможные аварийные ситуации. Выполнение любого прохода может быть приостановлено по инициативе оператора, либо сигналом от вагономоечного комплекса (ВМК). Возможен переход с автоматического режима работы на ручной режим работы. Система управления работает по командам, получаемых от датчиков, расположенных на соответствующих упорах, установленных вдоль железнодорожного полотна в зоне мойки.
В начале прямого хода тянущая тележка 7 находится позади передней тележки одного из вагонов. В исходном состоянии расстояние между ограничителями 14 каждой из консолей тянущей тележки составляет 500 мм. Это расстояние обеспечивает нахождение колесной пары вагонной тележки между тяговыми роликами 13 консолей 7а и 7б тянущей тележки и контролируется датчиком 31.
После установки вагона в зону мойки и проверки готовности оператор подает команду «ВПЕРЕД». По этой команде включается реверсивный электродвигатель 21, который через редуктор 22 и муфты 23 передает вращение барабану 24 состоящему из четырех шкивов с намотанными на них канатом 8. При этом натяжение каната 8 контролируется узлом натяжения 5, включающим неподвижный шкив, а усилие натяжение обеспечивается механизмом натяжения 3 посредством грузов, подвешенных на подвесах 34 двуплечего рычага 35. В результате обе консоли начинают сближаться, при этом тяга 10, жестко соединенная с зубчатой рейкой 25, перемещает ее до контактирования с прямозубой шестерней 26, т.к. эта шестерня находится на одном валу с косозубой шестерней 27, то прямозубые шестерни 28, находящееся на валах тяговых роликов 13, перемещаются по поверхности косозубой шестерни 27 из исходного положения в сторону боковых поверхностей рамы консолей тянущей тележки 7, выдвигая тяговые ролики 13 в рабочее положение. Это выдвижение происходит до тех пор пока палец вала не войдет в байонет 17, т.е. выдвижение тяговых роликов закончилось, но окончательная фиксация рабочего положения тяговых роликов происходит за счет пружин доводчика 29, которые довернут рычаги тяговых роликов 13 таким образом, чтобы контактная поверхность 32 вошла в плотное соприкосновение с неподвижным упором 12. В этом положении обе консоли фиксируются в ограничителях 14, сжимая упругий элемент 16, выполненный в виде пружины сжатия. Датчик контроля состояния тяговых роликов 30 зафиксирует это положение тяговых роликов относительно колесной пары железнодорожного вагона. (фиг.7). Датчик положения колесной пары 31 вагона выдаст соответствующий сигнал в систему контроля.
В результате обе колесные пары вагонной тележки зафиксированы тяговыми парами роликов 13. Система управления выдает команду на остановку электродвигателя 21 и начинается процесс мойки вагона. После окончания ее вагон тянущей тележкой 7 перемещается в начало зоны мойки, а сама тележка переводится в транспортное положение. Это происходит следующим образом: выключается гидроцилиндр 33 и натяжение каната 8 ослабевает, поэтому под действием сжатой пружины 16 консоли тянущей тялежки 7 раздвигаются в исходной положение, а тяговые ролики занимают первоначальное (нерабочее) положение. По команде «НАЗАД» тянущая тележка двигается в обратном направлении. Когда она достигает второго вагона, срабатывает соответствующий датчик и выдается команда «СТОП НАЗАД». На обратном ходу реверсивный двигатель 21 вращает барабан 24 с канатом 8 в другую сторону. Место остановки тянущей тележки на каждом шаге перемещения состава зависит от количества и длины вагонов, которое определяется заранее. После выполнения последнего шага перемещения тележки, т.е. окончания процесса мойки состава, тележка по команде «НАЗАД» возвращается в исходное положение.
Далее вышеописанный процесс повторяется до тех пор, пока все вагоны состава не будут отмыты. Отмытые вагоны локомотивом перемещается по основному пути, последовательно прицепляя следующие отмытые вагоны. Когда все вагоны готовы, состав направляется в депо.
Предлагаемое изобретение обладает рядом преимуществ по сравнению с известными техническими решениями: - надежностью в эксплуатации, т.к. механизм, управляющий толкающими роликами, выполнен конструктивно проще, а следовательно, и надежнее ранее применяемых и не вызывает трудностей при эксплуатации. За счет полной фиксации тяговых роликов с обеими колесными парами вагонной тележки исключается возможность перекоса при движении вагона и схождения его с рельс.
В настоящее время выполнена техническая документация новой установки, которая передана в производство, и осуществляется изготовление новых узлов.
Внедрение устройства будет осуществлено в течение 2010 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Маневровое устройство | 2022 |
|
RU2834493C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЕРЕМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ ВАГОНОВ | 2022 |
|
RU2781318C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1971 |
|
SU428968A1 |
| БЛОК УДЕРЖАНИЯ СОСТАВА НА СТАНЦИОННОМ ПУТИ | 2017 |
|
RU2658746C1 |
| Маневровая тележка для передвижения железнодорожных вагонов | 1977 |
|
SU867748A1 |
| Маневровую тележку для передвижения железнодорожных вагонов с автоматическим захватом вагонной колесной пары | 1972 |
|
SU430607A1 |
| Маневровое устройство | 1984 |
|
SU1265133A2 |
| ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2006 |
|
RU2327587C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |
Изобретение относится к средствам маневрирования подвижным составом. Устройство содержит тянущую тележку, выполненную в виде двух консолей соединенных упругим элементом. Механизм, управляющий выдвижением тяговых роликов, размещен в каждой консоли и выполнен в виде двухступенчатого шестеренчатого привода, соединенного байонетным соединением с валом тяговых роликов. Также механизм управления снабжен доводчиком, соединенным со второй ступенью привода и рамой каждой консоли тянущей тележки, обеспечивающим жесткий контакт тяговых роликов с неподвижными упорами, установленными на боковых поверхностях каждой консоли. В механизм натяжения введен гидроцилиндр, регулирующий положение двуплечего рычага с грузами. Достигается повышение надежности в эксплуатации. 2 з.п. ф-лы, 7 ил.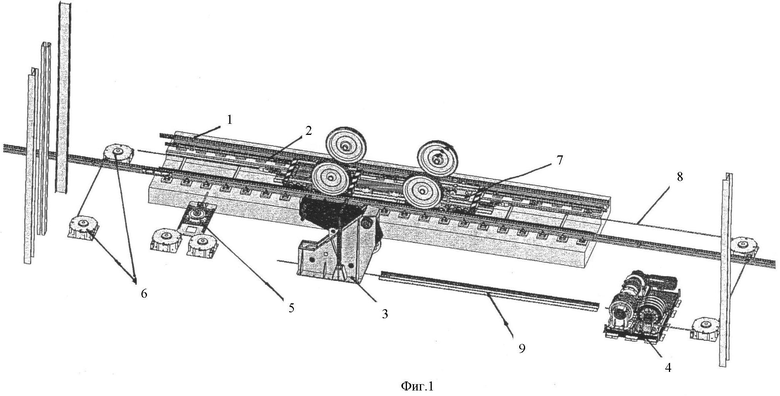
1. Устройство для перемещения железнодорожных вагонов, содержащее тянущую тележку, снабженную парами сдвоенных опорных роликов, которая свободно передвигается между рельсами железнодорожной колеи по отдельно проложенным вспомогательным рельсам, вперед и назад посредством каната, через шкивы и механизм натяжения, соединенный с тяговым модулем, снабженным автономным электромеханическим приводом, внутри рамы тянущей тележки размещен механизм, управляющий выдвижением тяговых роликов, установленных с обеих сторон рамы тележки, с возможностью обеспечения сцепления с колесной парой вагонной тележки, систему контроля за положением железнодорожного вагона и тянущей тележки, отличающееся тем, что тянущая тележка выполнена в виде двух консолей, соединенных упругим элементом, а механизм, управляющий выдвижением тяговых роликов, размещен в каждой консоли и выполнен в виде двухступенчатого шестеренчатого привода, соединенного байонетным соединением с валом тяговых роликов, а также он снабжен доводчиком, соединенным со второй ступенью привода и рамой каждой консоли тянущей тележки, обеспечивающим жесткий контакт тяговых роликов с неподвижными упорами, установленными на боковых поверхностях каждой консоли, а в механизм натяжения введен гидроцилиндр, регулирующий положение двуплечего рычага с грузами.
2. Устройство по п.1, отличающееся тем, что первая ступень шестеренчатого привода содержит зубчатую рейку, соединенную с тягой канатного привода, контактирующую через прямозубую шестерню с косозубой шестерней, а вторая ступень - прямозубую шестерню, насаженную на вал тяговых роликов и также контактирующую с косозубой шестерней.
3. Устройство по п.1, отличающееся тем, что в систему контроля дополнительно введены датчики контроля за состоянием тяговых роликов и положением каждой консоли относительно колесных пар вагонной тележки, установленные на раме каждой консоли.
| Передвижная скреперная установка | 1948 |
|
SU77838A1 |
| Устройство для перемещения вагонов | 1989 |
|
SU1703524A1 |
| Устройство для перемещения грузовых тележек | 1987 |
|
SU1439003A1 |
| Устройство электромагнитного контроля ферромагнитных изделий | 1986 |
|
SU1388778A1 |
| CA 13163980, 20.04.1993. | |||

