И и Претоние итиоснтгч к илшииогч-- роеиню, непигрслстпеино к мехаиичмнм прерывистого вра1цент1я.
Целью изобретеЕ1Ия являгтся нпе яадежногти мехик,г, м гчрт ум иьшенпя дин.мических иаг-ругн К, ко--)- пенсации рлтброса гзесоны.ч леталп припода и ра-эличия механических характеристик упругих :1.пемепт1.)и, тго достигается в результате рргучиг П1ки угла попорота и времени П1 ч1орота.
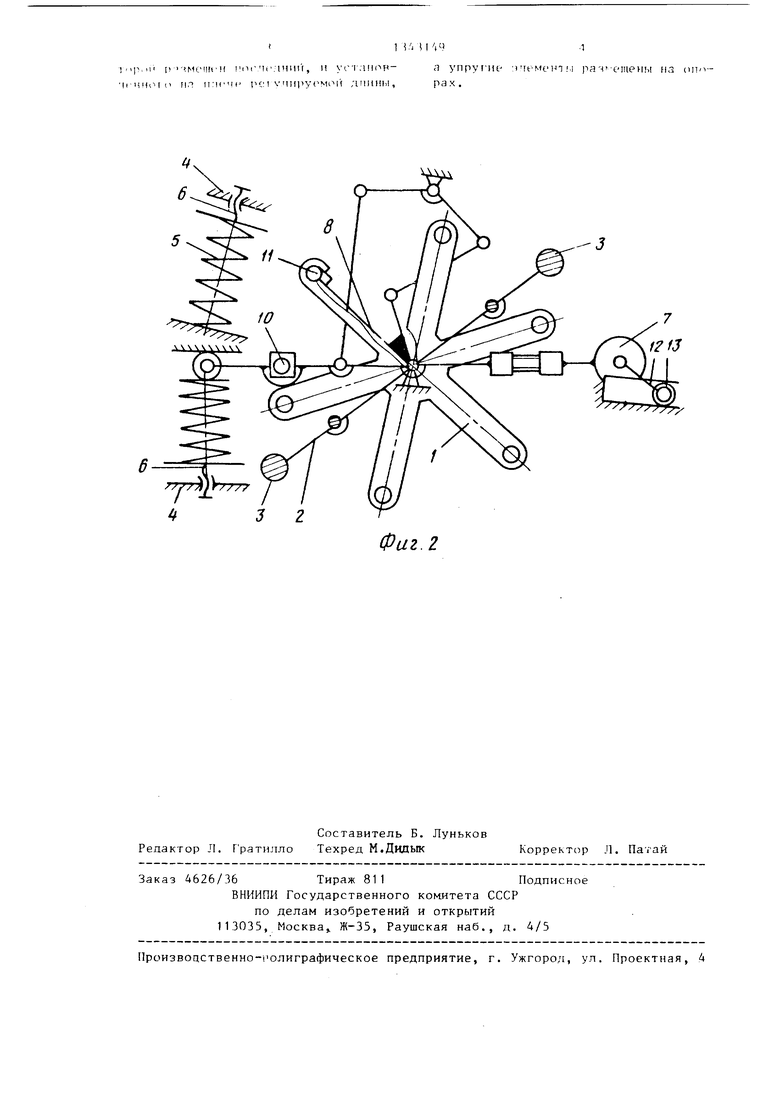
На фиг. 1 изображен мехаии м и неустойчивом рапиопесии, оГилш вид; на фиг. 2 - п :iii, н рабочем полс - жении.
MexaHU jM i - тистгтго пращения сп держит вал 1 i- -.с-сгко чакрепченным на нем 1лемен:г)м 2 с инерии(.)нно)1 гтлс сой 3, aKKVMyjTHTop 4 мс х:тн1гнч К()Г энергии с упругими эпементами 5, vr- т.lIioвлel И I nl Fia регулируемых опорах 6, двигат е.чь 7, шарнирно соелиненш.ю между собпй и установленные с иочи; нрстью вращения в противоположные стороны два рычат 8 и 9, од,ин из которых двуплечий с плечом регулируемой длины, другое плечо предназначено для взаим1 л, гния с упругими элементами S, yiii: ) пальцы 10 и 11 размещенные на .г ix 8 и 9 для по- очередно Р.ЧИМОДРИГТВИЯ с валом 1. Механизм (рик-сации выполнен в виде р.: чага 12 с роликом 15 и направляюще 14, в которой размещен последштй и установлен Fta плече регулируемой
ДЛИ1 1,1.
Механизг лрерр 1вистого вращения работает следующим образом.
Исходным положением механизма является попоженпр, кш-да один из упругих Э1гементо т сжат, упраиляеь ый палец 10, у с vaHon (епный на двуплечем р1.1чаге 9, пиолится во взаимодействие с валом 1, |)ычаг 12 с роликом 13 механизма фиксации занимает положение, перпендикулярное направляющей 1 Д. Тяким образом, лчуплелий рычаг 9 занимает положение неустойчивого равновесия. При команды на двигатель 7 начинает поворачиваться 12 и ролик 13 перем чцается в направляющей 14, тем caNft.iM ;:,вупчечий рычаг 9 выходит из неустойчивого равновесия. Упругий элемент S разг оняет двуплечий рычаг 9, рычаг 8 при этом начинает вращаться в противоположную сторону, управляемый палец 10, воздействуя на ват 1, поворачивает его
П
)
1
0
ь
и Ц-,, I с .,1 -«ЧсЧ ЛМ С И1Ч РППМ1|- Hiil l i.t;lri i. I .o BPiM4 D.rsfii M (М пилгплия ynpvriif o члемгчга i 11ер1 Х(ми 1 I кинетическую инерционной ми сы . Лалег, пш орачипл- яс1 пп мпериии, за с-чгг накоппенной кинетичес oil )Н(ргии FI uit eлтe 2 г UH(piU oHHoit млссой ) /ируплемий рычаг 9 д м:1ит-аег другого упруго1Ч) мента 5 и начинает сжимать его. Кинетическая Hiepi iiH чпемента 2 с инерци- oHHoii массчм 1 перехотят ггри лтом в по -енциальную энергию упругого элемента 5. Сжатие упругого -пк мента 5 пр{ми:холиг дп гсх пор, пока (1ычаг 12 механизма фиксации не займет по.ло- жепие , .чикулярное направляющей 14, лри1га елр, 7 1 ыключается. Управ- 11ЯК1111ИЧ 11Л1)(.М1 1П, установленный на (м рычг.ге 9, выводится из вза- иммд.чн т 1П1Я валом 1, гталец 11, ус- га нчт( ic пиыи на рычаге 8, вводится во .|чл1 ; 1г-гл ие с валом I. При ио- лачс комлплы на двигатель 7 двуцде- чии Р1.1ЧЛ1 Ч В1.1хс1л,ит из неуст йчиво- г о + ения. Далее цикл повторяется. Р(м пир(1пк/) уг.ла поворота рычагов 8 и ) осущестт ляется с помощью ре1 лиро ки лгши1,| плеча рычага 9, на установлен рычаг 12 механизма (фиксации. .I lR рег улировки времени цо- .) (1Трена регу.гшровка (Л1Л npt Л1 лритч 1 ЛК1го поджатия упругих Л1 мгпг1Ч . ) 4,1 счс ре гу.чируемых по 1 ысоте опор h, на ,ix установле( УПГЛЛ ИС ЧЧС МС НТЫ 5.
о р f.f / л а и 3 о б р е т е н и я
;1Г)П1-1И и Л, iipf biniicrnro В1эащения, соjiop i4 4i пли с лес г ко закрепленным на нем члемелтом с инерционной массой, аккумулягорМе ханической энергии с yniiyrnhni (Л1тпми, двигатель и ме4ь ханизм фикгацми, отличающий- с я le .i, что, с целью повьщтения належно. ги, пришхц снабжен регулируемыми по П1.НЛГ1 t- опорами, шарнирно со- елиненньпи CA)6oii и установленны5Q . Л с BC 3M;i:t 1и м г 1-ю 1 ращения в противоположные ;Г Ч я рычагами,один из которых с плечом ре1 улируе- мой длины, .црчл ое плечо которого предназначено нзаимодейс гвия с упрусс гими злеетент,)ми, управляемыми пальцами, размещенным) на рычагах для по - очереднсч о взплмолействия с валом, механизм diHbc,ninn выполнен в виде рычага с роликг. м и направляющей, в коip.iH П чмепи И I nr K . uiHit, и устанор-a ynpyi iie ii ieMem .м pa4 eiuenw на (щмMHiMp ПЛ iKicMi pel vtiiipyeMc if ;uiHHi i,pax.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прерывистого вращения | 1986 |
|
SU1343149A1 |
| Кузов транспортного средства для перевозки легковесных грузов | 1982 |
|
SU1058809A1 |
| Торцовое уплотнение | 1987 |
|
SU1451383A1 |
| Поворотный стол с механизмом зажима приспособления-спутника | 1985 |
|
SU1308444A1 |
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Устройство для автоматического переключения вращения ходовых винтов коноидного привода в бобинной прядильной машине для искусственного шелка | 1955 |
|
SU105253A1 |
| Трансформаторный регулятор напряжения | 1986 |
|
SU1415249A1 |
| Основовязальная машина для вывязывания польстерных щеток | 1955 |
|
SU102492A1 |
| Насадка для лабораторных ректификационных колонок | 1949 |
|
SU86849A1 |
| Устройство для разлива жидкостей во флаконы | 1955 |
|
SU103423A1 |
Изобретение относится к уплотнениям вращающихся палов и позво.чяет повысить герметичность уплотнения. Торцовое уплотнение содержит корпус, устройство для подачи смазывающей жидкости в зону трения и кольца трения с концентр1тческими канавками на рабочих поверхностях, подсоединенные к противоположным полюсам источника nocToHHf oro тока. Кольца трения выполнены из неэлектропроводного мате риала, при этом подвижное в осевом направлении кольцо армировано электродами, соединяю 11ими канавку на его рабоче) поверхности с отрицательным полюсом источника постоянного тока, г1оложительн1иГ1 полюс которого связан с корпусом уплотнения. При работе затворная жидкость электризуется электродами, одновременно электризуются и поверхности трения колец. Возникающие при этом электростатические силы препятствуют просачиванию затворной Ж1ЩКОСТИ между кольцами трения в сторону вала. 1 ил. сл 4 со СП Oi
3 2
Фиг.2
| Торцовое уплотнение | 1980 |
|
SU918609A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
